Clear Sky Science · zh
可编程持久随机漫步的主动布朗粒子主导涌现动力学
为何微小游走颗粒重要
动物和细菌已经进化出巧妙的策略来寻找食物并在拥挤环境中导航。这项研究把其中的一些多样性带入实验室,通过训练合成的显微游动体按命令遵循多种随机运动风格。能够编程这些微粒如何漫游与聚集,不仅能帮助科学家探索生命系统如何自我组织,也能为将来用于定向递送或智能感知等任务的微型机器设计提供思路。 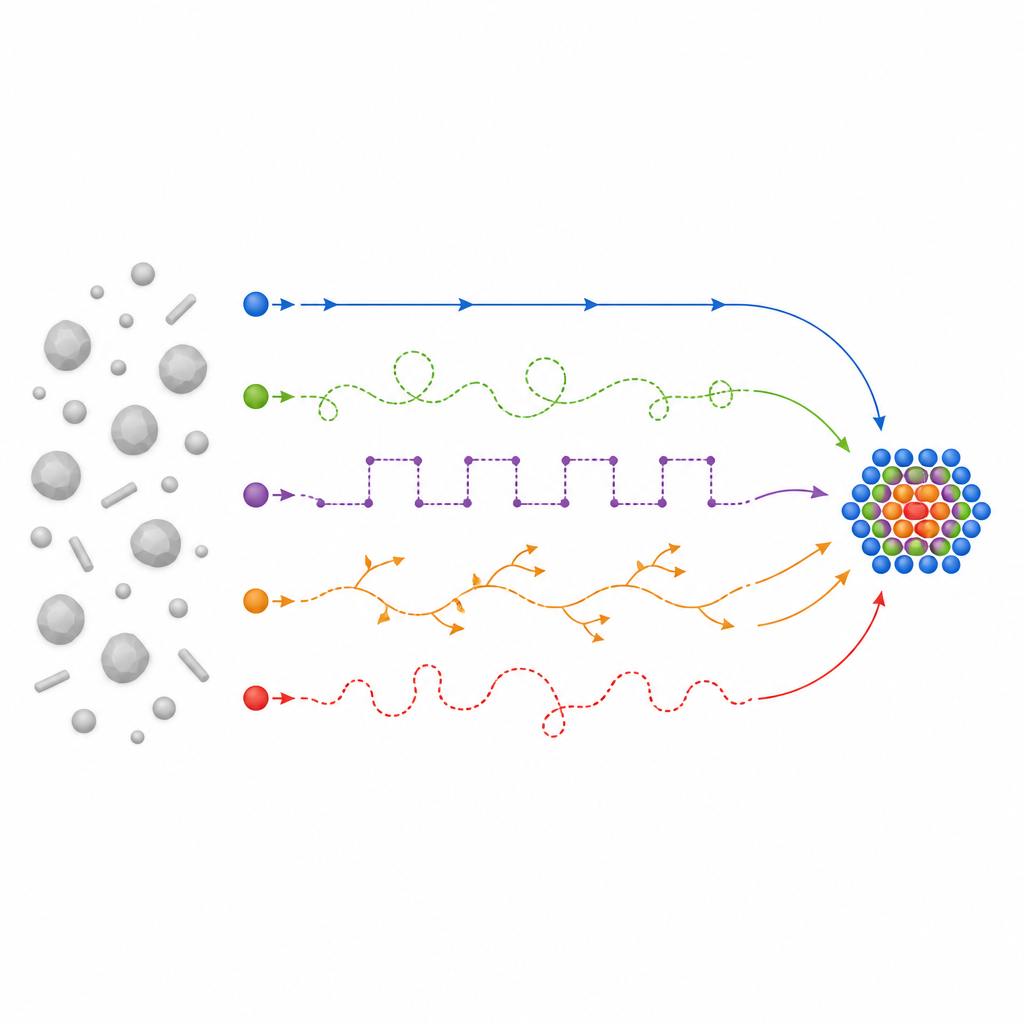
构建可控的微型游动体
研究者制造了含有微小赤铁矿(氧化铁)立方体的微米级球体。在紫外光照和燃料溶液中,这些颗粒凭借周围发生的化学反应自我推进。赤铁矿立方体还赋予每个颗粒弱磁矩,使外加磁场可以操控其朝向,而光强决定其速度。借助可编程的磁场和光源组合,团队能够实时独立控制颗粒的运动速度和朝向。
教颗粒不同的漫游方式
利用该装置,团队编码了几种通常用于描述细菌、动物乃至金融市场的经典随机漫步样式。他们实现了所谓的列维漫步,在这种模式中多数步长较短,但偶尔会出现极长的运行,使颗粒能在短时间内覆盖很大距离。通过调节决定长运行可能性的单一参数,他们观察到的运动可以从近乎直线的弹道快速移动,变化到在长时间尺度上更具扩散性的随机行为。他们还通过在直线运行时开启光照、关灯以使颗粒在下一次运行前通过热扰动丧失取向,从而模拟某些细菌的跑-翻转(run-and-tumble)运动。
从简单漫步到自避路径
除了这些生物启发的模式,研究者还编程了来自聚合物物理学的漫步类型。在高斯漫步中,每一步的步长取自钟形分布,方向每次重新选择,导致呈云状的扩散以可预测的方式增长。在自避漫步中,路径被限制为避免先前访问过的位置,类似于无法自穿透的链。在这里,团队将转向限制在简单网格上,并用软件规则防止重叠。所得路径在空间中更高效地扩展,起点与终点之间测得的距离也符合这些模型长期以来的理论预期。
按需切换行为并画出形状
该平台的一个显著特征是,同一颗粒可在不更改硬件的情况下按需在运动风格之间切换。在一次运行中,颗粒可以先表现为翻转器,然后像高斯漫步者,最后像列维搜索者,只需更新控制程序。研究者还利用光强创建随时间变化的速度景观,使颗粒在无物理障碍的情况下平滑地减速和加速。通过匀速旋转磁场,他们将游动体变为圆周运动者;通过施加明确的定时旋转,他们引导颗粒沿三角形、正方形、五边形、嵌套多边形,甚至基于斐波那契数列的螺旋路径移动。 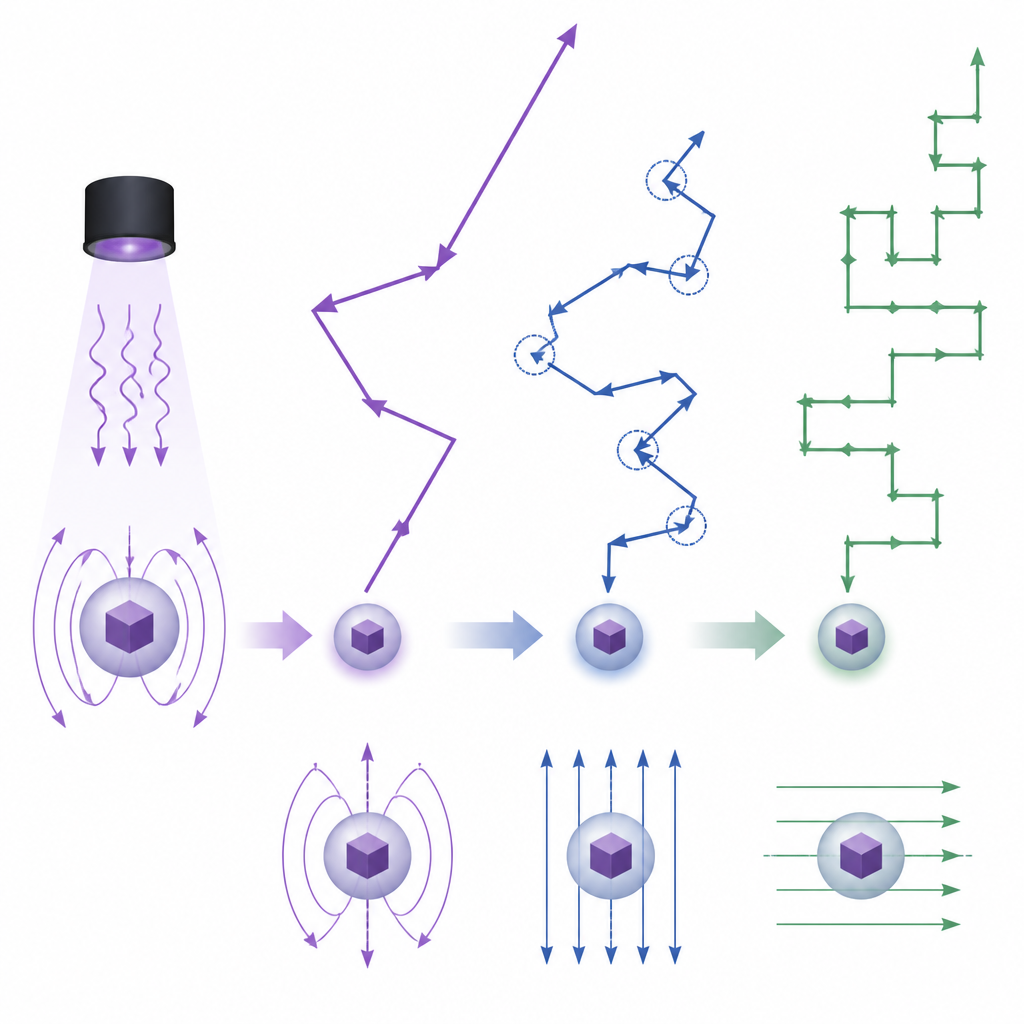
当多颗游动体相遇时
研究超越了单个颗粒,考察这些被编程的运动如何影响群体行为。在较高浓度下,既有直线游动的颗粒也有圆周游动者会组装成致密的晶体状簇。然而,圆周游动者聚集得更慢,且其最大簇的停滞尺寸较小,而直线游动者则持续形成更大的有序区域。这表明单颗粒层面的运动风格会强烈影响群体如何随时间形成图样并共享空间。
对未来的意义
通过展示简单的合成游动体可以被教导以广泛的搜索和漫游模式,并能按命令在其间切换,这项工作提供了一个灵活的实验模型,用于研究运动规则如何影响运输、搜索与自我组织。对普通读者而言,关键信息是:科学家现在能够像程序员编写数字代理一样为微小颗粒编排行程,从而为测试生物体如何探索世界以及未来微型机器如何在复杂环境中导航打开了新途径。
引用: Sunkesula Raghavendra, T., Shelke, Y., van der Ham, S. et al. Programmable persistent random walks in active Brownian particles govern emergent dynamics. Commun Phys 9, 166 (2026). https://doi.org/10.1038/s42005-026-02596-6
关键词: 主动物质, 微型游动体, 随机漫步, 列维漫步, 自组织