Clear Sky Science · he
הליכות אקראיות מתמשכות אפשריות בתכנות בחלקיקים בראוניאניים פעילים מכוונות דינמיקה מתהווה
למה חלקיקים שוטטים זעירים חשובים
בעלי חיים וחיידקים פיתחו אסטרטגיות חכמות לחיפוש מזון ולתנועה בסביבות צפופות. המחקר הזה מביא חלק מן הרבגוניות ההיא למעבדה על־ידי לימוד שחיינים סינתטיים מיקרוסקופיים לעקוב אחרי סגנונות שונים של תנועה אקראית לפי פקודה. היכולת לתכנת כיצד חלקיקים זעירים אלו משוטטים ומצטברים יכולה לסייע למדענים לחקור כיצד מערכות חיות מארגנות את עצמן ולעצב מיקרו-מכונות עתידיות למשימות כמו הובלה ממוקדת או חישה חכמה. 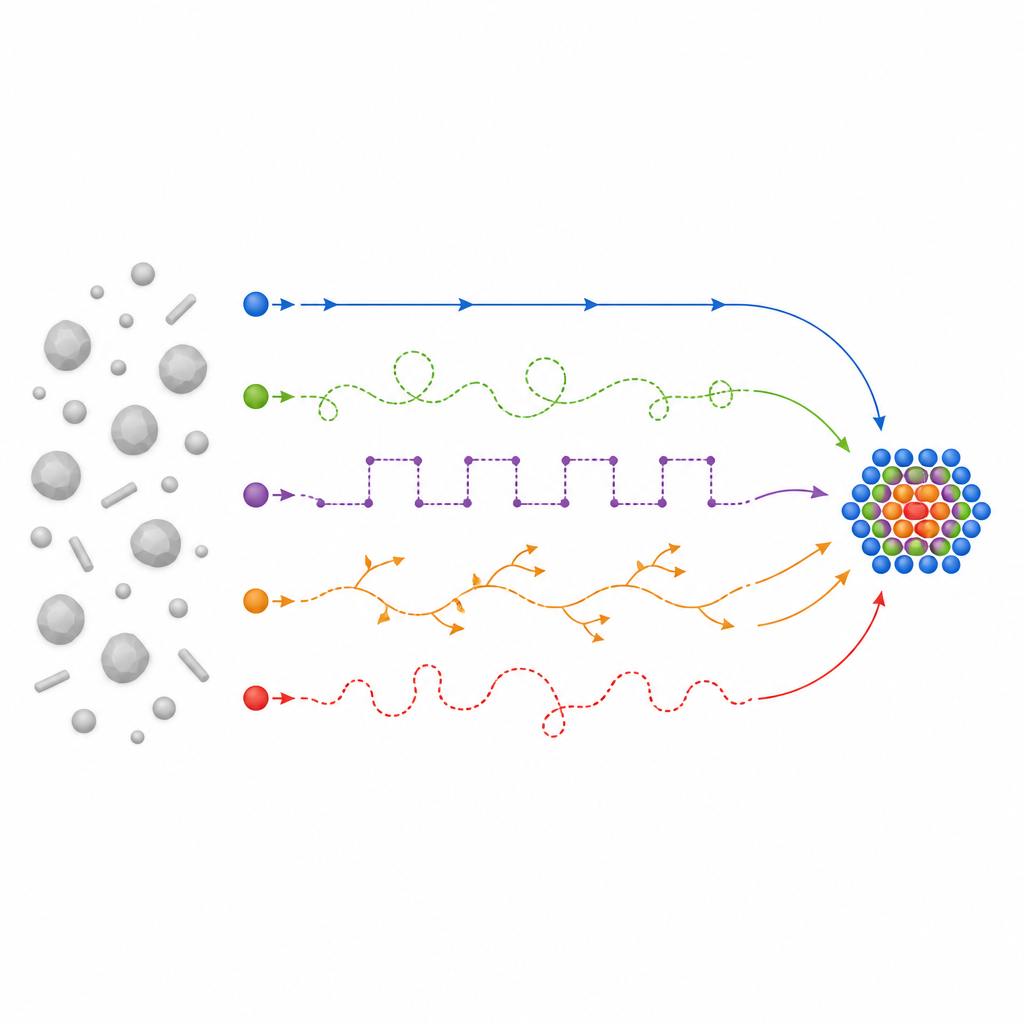
בניית שחיינים זעירים ניתנים לשליטה
החוקרים בנו כדורים בקנה מידה מיקרומטרי המשלבים קוביית המטיט (חמצן ברזל). תחת אור אולטרה־סגול ובתמיסת דלק, חלקיקים אלו שוחים בעצמם כאשר תגובות כימיות סביבם דוחפות אותם קדימה. קוביית המטיט גם מקנה לכל חלקיק מומנט מגנטי חלש, כך ששדה מגנטי חיצוני יכול לנתב את כיוונו, בעוד שעוצמת האור קובעת את מהירותו. באמצעות שילוב פשוט של מגנט ותאורת תכנות, הצוות יכול לשלוט בעצמאות במהירות התנועה ובכיוון הפניית החלקיקים, בזמן אמת.
לימוד החלקיקים דרכים שונות לשוטט
באמצעות ההתקנה הזו, הצוות קידד מספר סגנונות קלאסיים של הליכות אקראיות שמוזכרים בדרך כלל עבור חיידקים, בעלי חיים ואפילו שווקים פיננסיים. הם יצרו מה שמכונה הליכות לֵוי, שבהן רוב הצעדים קצרים אך לעתים נדירות יש ריצות מאוד ארוכות שמאפשרות לכסות מרחקים גדולים במהירות. על ידי כיוונון פרמטר יחיד שמגדיר את הסבירות לריצות הארוכות, הם צפצפו תנועות שנעו מתנועה כמעט ישרה ובאליסטית למה שנראה כמו התנהגות דיפוסיבית אקראית בטווחי זמן ארוכים. הם גם חיקו את תנועת ה־run-and-tumble של חיידקים מסוימים על ידי הדלקת האור לריצות ישרות וכיבויו לפרקי זמן מספיקים כך שהחלקיק יאבד את כיוונו עקב רטט תרמי לפני הריצה הבאה.
ממהלכים פשוטים למסלולים המונעים ממגע עצמי
מעבר לדפוסים המושפעים מהביולוגיה, החוקרים תכנתו הליכות שמוכרות מפיזיקת הפולימרים. בהליכה גאוסית, אורך כל צעד נבחר מתוך התפלגות בצורת פעמון והכיוונים נבחרים מחדש בכל צעד, מה שמוביל לפיזור ענני שגדל בצורה צפויה. בהליכה המונעת ממגע עצמי, המסלול מוגבל כך שלא יחזור על אתרים שביקר בהם קודם, בדומה לשרשרת שאינה יכולה לעבור דרך עצמה. כאן הקבוצה הגבילה סיבובים לרשת פשוטה והשתמשה בחוקי תוכנה כדי למנוע חפיפה. המסלולים שהתגלו התפרסו ביעילות רבה יותר בחלל, והמרחקים הנמדדים בין נקודת ההתחלה לסיום תאמו תחזיות תיאורטיות ותיקות לאותם מודלים.
מעבר בין התנהגויות ושרטוט צורות על פי פקודה
מאפיין מעניין של הפלטפורמה הוא שהחלקיק עצמו יכול לעבור בין סגנונות תנועה לפי דרישה ללא שינוי בחומרה. במהלך ריצה יחידה, חלקיק יכול להציג התנהגות של 'מטלטל' ואז של הלך גאוסי ולבסוף של מחפש לֵוי, רק באמצעות עדכון תוכנית הבקרה. החוקרים השתמשו גם בעוצמת אור כדי ליצור נופים מהירות המשתנים עם הזמן, מה שגרם לחלקיקים להאט ולהאיץ בתבניות חלקות ללא מחסומים פיזיים. על ידי סיבוב השדה המגנטי בקצב קבוע הם הפכו שחיינים לנעים במסלולים מעגליים, ובאמצעות סיבובים חדים מתוזמנים הם הנחו חלקיקים לאורך משולשים, ריבועים, מחומשים, פוליגונים מקוננים ואפילו ספירלות המבוססות על סדרת פיבונאצ'י. 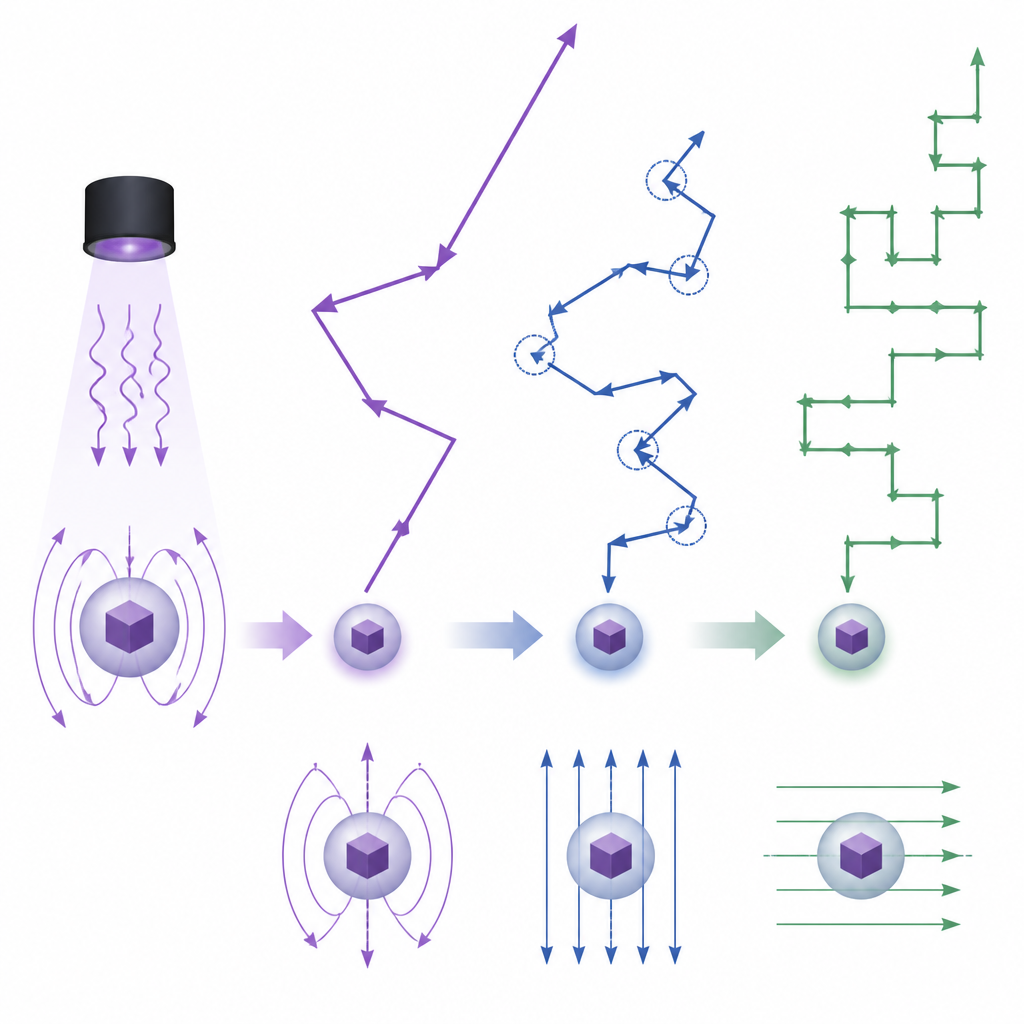
כששחיינים רבים נפגשים
המחקר מתרחב מעבר לחלקיקים בודדים כדי לבדוק כיצד התנועות המתוכנתות הללו משפיעות על התנהגות קבוצתית. בריכוזים גבוהים, הן חלקיקים ששוחים ישר והן נעים מעגליים נאספו למאשכולות צפופים בדומה למבנים גבישיים. עם זאת, השחיינים המעגליים עשו זאת בקצב איטי יותר והאשכולות הגדולים ביותר שלהם נעצרו בגודל קטן יותר, בעוד שהשחיינים הישרים המשיכו לבנות תחומי סדר גדולים יותר. ממצא זה מדגים כי סגנון התנועה המקודד ברמת החלקיק הבודד יכול לעצב בחוזקה כיצד קבוצות יוצרות דפוסים ומשתפות מרחב לאורך הזמן.
מה המשמעות להלכה
בהדגמת אפשרות של לימוד שחיינים סינתטיים פשוטים טווח רחב של דפוסי חיפוש ושוטטות, וכן מעבר ביניהם לפי דרישה, עבודה זו מציעה מודל מעבדה גמיש לחקירת האופן שבו כללי תנועה משפיעים על הובלה, חיפוש ואוטו-ארגון. עבור הקורא הכללי, המסר המרכזי הוא שמדענים יכולים כעת לתכנת את מסעותיהם של חלקיקים זעירים בדומה לאופן שבו מתכנתים סוכנים דיגיטליים, לפתיחת אפשרויות לבדוק רעיונות על אופן חקר היצורים החיים את סביבתם וכיצד מיקרו-מכונות עתידיות עשויות להסתגל לנווט בסביבות מורכבות.
ציטוט: Sunkesula Raghavendra, T., Shelke, Y., van der Ham, S. et al. Programmable persistent random walks in active Brownian particles govern emergent dynamics. Commun Phys 9, 166 (2026). https://doi.org/10.1038/s42005-026-02596-6
מילות מפתח: חומר פעיל, מיקרו-שחיינים, הליכות אקראיות, הליכות לֵוי, אוטו-ארגון