Clear Sky Science · zh
一个将 OpenStreetMap 融入多领域城市规划任务的统一深度学习框架
为快速成长的城市提供更聪明的地图
随着城市人口和车辆激增,规划者难以跟上:道路拥堵、绿地减少、空气质量下降。本研究展示了如何将免费可得的在线地图、来自太空的卫星影像和现代人工智能结合起来,为城市管理者提供对街道、建筑、交通和空气的持续更新的“X 光”视图。研究聚焦于快速发展的俄罗斯城市克拉斯诺达尔,作者构建了一个数字化框架,将原始地理数据转化为关于在哪里建设、如何出行以及如何改善呼吸环境的实用建议。
为什么传统地图已不再足够
传统的规划工具依赖于官方地图和调查,这类资料成本高昂且很快过时。与此同时,像 OpenStreetMap 这样由志愿者绘制道路和建筑的平台,提供了免费且细节丰富的数据——但质量参差不齐,尤其在交通不繁忙的地区存在缺口。作者认为,单靠任一来源都无法完整呈现现代城市的复杂性。他们的解决方案是将志愿者绘制的地图与卫星影像、人口统计网格以及空气和气象观测融合,然后让深度学习算法发现人类难以在大规模上识别的模式。
从原始城市数据到数字孪生
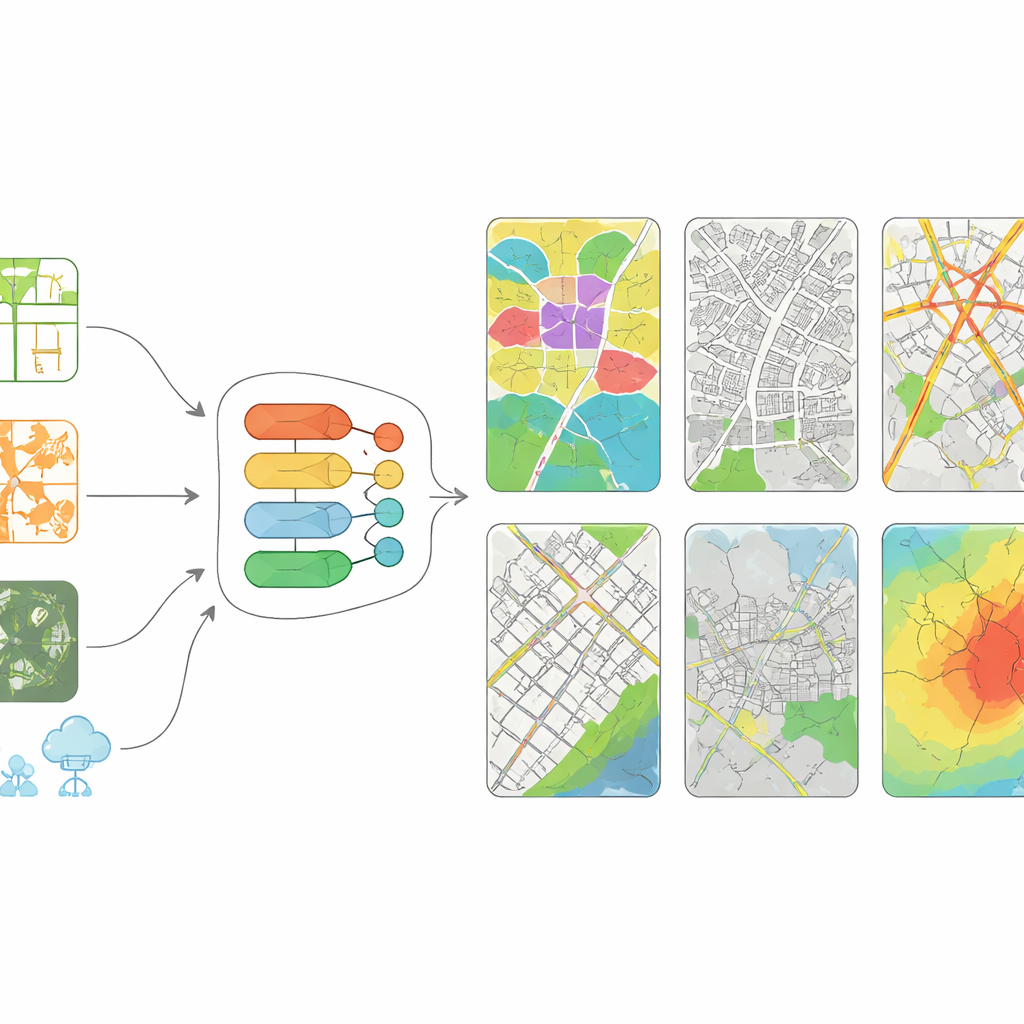
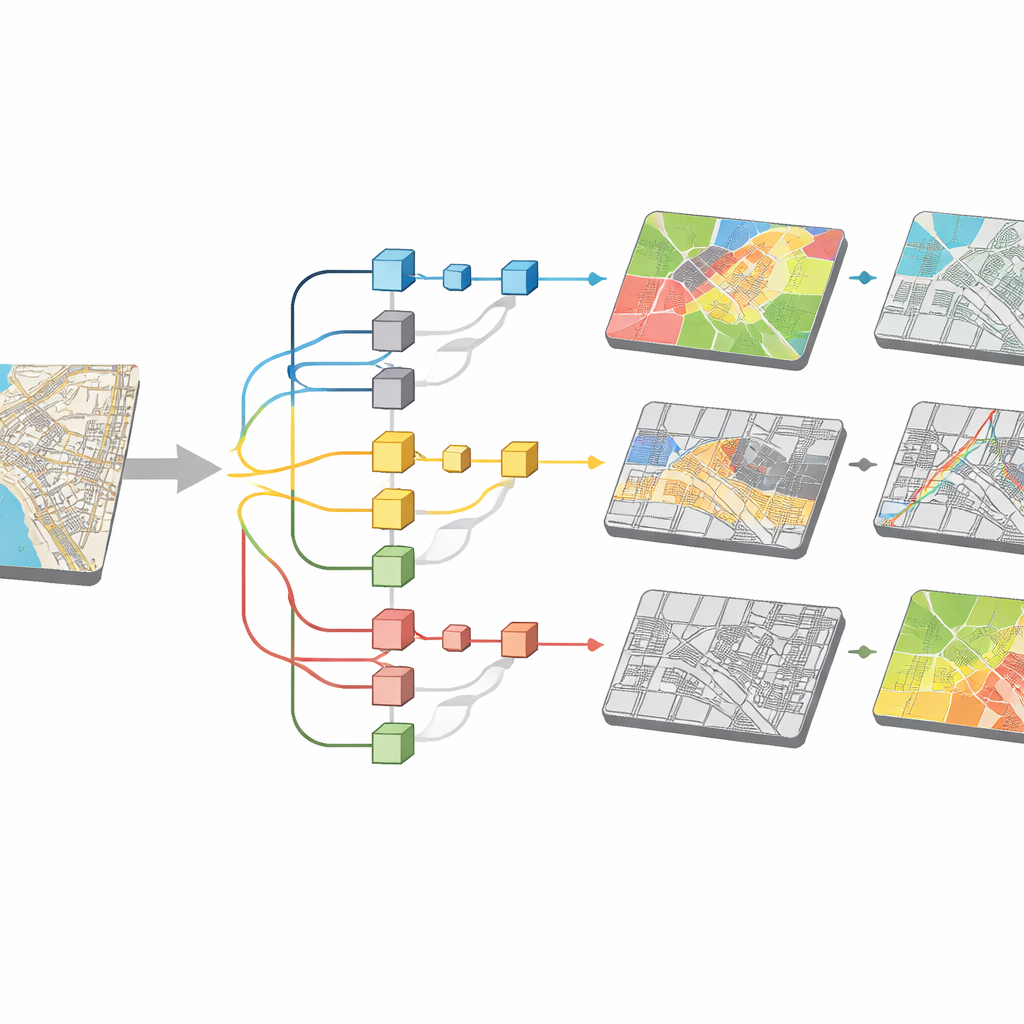
该框架作为一个四步管线运行。首先,收集克拉斯诺达尔的多层信息:OpenStreetMap 的道路和建筑轮廓、Sentinel‑2 卫星影像、类似普查的人口网格,以及为期一年的交通和空气质量测量数据。第二,仔细清洗并对齐这些数据,使每个像素和街道片段在同一网格上对齐。第三,训练若干专用神经网络,每个网络针对不同任务调优:一个用于标注住宅或公园等土地使用类型,一个用于描绘建筑足迹,一个用于预测不同时间传感器处通过的车辆数量,另一个用于预测细颗粒物污染。最后,将这些输出拼接成一组城市指标,以统一的方式描述城市的结构、流动与环境状况。
数字城市的学习效果如何
为了评估这个数字孪生的可信度,团队将结果与高质量参考数据进行比较。在土地使用制图方面,他们的模型约 92% 的时间能正确分类区域,且在识别绿地方面表现尤为出色。建筑描绘网络与真实建筑形状的重叠率接近 89%,这一水平与使用类似影像的领先研究相匹配或略优。对于交通系统,模型对城市传感器的小时车辆计数预测平均仅相差几辆;在短期空气污染估计方面,误差只有每立方米几微克。这些得分位于已发表基准之内,并常处于上端,表明多数据源的结合确实使城市视野更加清晰。
该框架在实地揭示的内容
由于所有任务在同一框架内运行,其输出相互强化。详尽的建筑地图有助于明确人们实际居住和工作的地点,进而细化交通和污染分布。土地使用图能凸显绿地短缺的街区,而交通预测则能指出反复出现的高峰拥堵点,这些地方可能受益于更智能的信号配时或更好的公共交通。空气质量预测显示何时何地微小颗粒物可能激增,为监管部门针对性地控制排放提供依据。尽管该方法依赖计算能力,且仍继承了志愿者制图不均与传感器稀疏带来的盲点,但其模块化设计意味着其他具有基本地图和卫星覆盖的城市也可以采用。
这对未来城市意味着什么
简言之,研究证明将众包地图、卫星观测与传感器读数结合深度学习,可以把城市的零散画面转化为连贯的高分辨率决策指南。该框架不再将土地使用、交通和空气质量视为孤立问题,而是在一个可适应的系统中将它们联结起来。对居民而言,这可能意味着更少的通勤时间、更多的绿地与更清洁的空气;对规划者和决策者而言,它提供了一套可扩展的方案来建设智能、可持续的城市,而无需完全依赖昂贵的专有数据。
引用: Chen, Y., Afandi, W.S., Gura, D. et al. A unified deep learning framework integrating OpenStreetMap for multi-domain urban planning tasks. Sci Rep 16, 10870 (2026). https://doi.org/10.1038/s41598-026-45927-x
关键词: 城市规划, OpenStreetMap, 深度学习, 交通预测, 空气质量