Clear Sky Science · ar
إطار تعلم عميق موحَّد يدمج OpenStreetMap لمهام التخطيط الحضري متعددة المجالات
خرائط أذكى للمدن النامية
مع تزايد أعداد السكان والسيارات في المدن، يكافح المخططون لمواكبة التغيرات: تسدُّ الطرق، تختفي المساحات الخضراء، ويزداد تلوُّث الهواء. تُظهر هذه الدراسة كيف يمكن أن تُنسَج الخرائط المتوفرة مجانًا على الإنترنت، وصور الأقمار الصناعية، والذكاء الاصطناعي الحديث معًا لتزويد مسؤولي المدن بـ«أشعة إكس» محدثة باستمرار لشوارعهم ومبانيهم وحركتهم وجودة هوائهم. مع تركيز على مدينة كراسنودار الروسية سريعة النمو، يبني المؤلفون إطارًا رقميًا يحوّل البيانات الجغرافية الخام إلى إرشادات عملية حول مكان البناء، وكيفية التنقل، وكيفية التنفّس بشكل أنظف.
لماذا لم تعد الخرائط التقليدية كافية
تعتمد أدوات التخطيط التقليدية على خرائط واستطلاعات رسمية مكلفة وفي الغالب تتقادم بسرعة. في المقابل، توفر منصات مثل OpenStreetMap، حيث يتتبع المتطوعون الطرق والمباني، تفاصيل غنية ومجانية—لكن بجودة غير متسقة وثغرات، خاصة في الأحياء الأقل نشاطًا. يرى المؤلفون أن أي مصدر وحده لا يكفي لالتقاط تعقيد المدينة الحديثة. والحل لديهم هو دمج الخرائط المرسومة من قِبَل المتطوعين مع صور الأقمار الصناعية، وإحصاءات السكان، وقراءات الهواء والطقس، ثم ترك خوارزميات التعلم العميق تكتشف أنماطًا يصعب على البشر رصدها على نطاق واسع.
من بيانات المدينة الخام إلى توأم رقمي
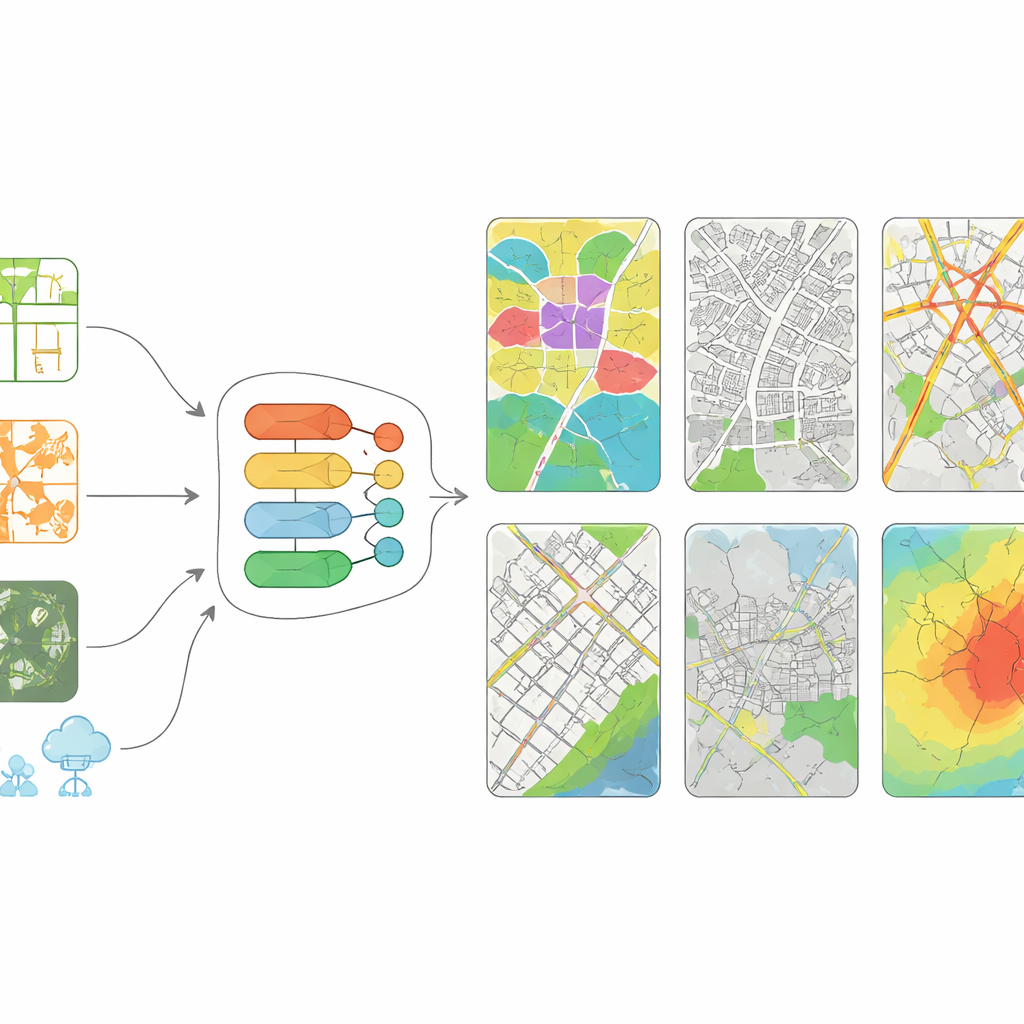
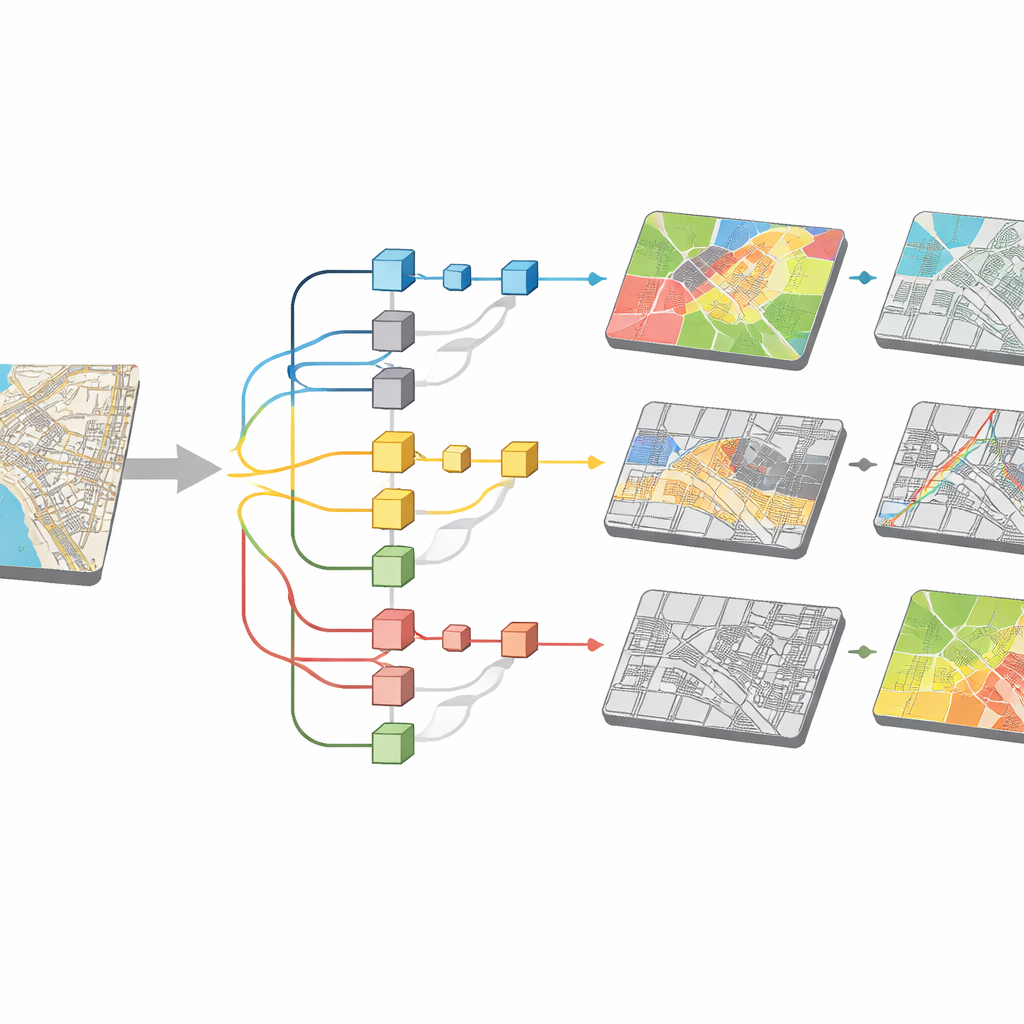
يعمل الإطار كسلسلة معالجة من أربع خطوات. أولًا، يجمع طبقات عديدة من المعلومات عن كراسنودار: خطوط الطرق ومخططات المباني من OpenStreetMap، صور الأقمار الصناعية من Sentinel‑2، شبكات سكانية على غرار التعداد، وقياسات لحركة المرور وجودة الهواء عبر عام كامل. ثانيًا، ينقّح هذه البيانات ويُحاذيها بعناية بحيث يتطابق كل بكسل وقطعة شارع على نفس الشبكة. ثالثًا، يدرب عدة شبكات عصبية متخصصة، كل منها مُعدّ لمهمة مختلفة: واحدة لتعليم أنواع استخدام الأراضي مثل المساكن أو الحدائق، وأخرى لتتبع بصمات المباني، وواحدة لتوقع عدد السيارات المارة بالمجسات في أوقات مختلفة، وأخرى للتنبؤ بتلوث الجسيمات الدقيقة. أخيرًا، يجمع مخرجات هذه الشبكات في مجموعة مؤشرات حضرية تصف بنية المدينة وحركتها وظروفها البيئية بطريقة موحَّدة.
مدى تعلم المدينة الرقمية
لاختبار ما إذا كان يمكن الوثوق بهذا التوأم الرقمي، يقارن الفريق نتائجه ببيانات مرجعية عالية الجودة. في رسم خرائط استخدام الأراضي، يصنِّف نموذجهم المناطق بشكل صحيح حوالي 92% من الوقت، وهو قوي بشكل خاص في العثور على المساحات الخضراء. تتطابق شبكة تتبع المباني مع أشكال المباني الحقيقية بنسبة تقارب 89%، وهو مستوى يضاهي أو يتفوّق قليلًا على دراسات رائدة استخدمت صورًا مماثلة. بالنسبة لحركة المرور، يتنبأ النظام بعدد السيارات بالساعة عند مجسات المدينة بفرق قدره بضعة سيارات في المتوسط، ويقدّر تلوث الهواء قصير المدى بأخطاء لا تتجاوز بضعة ميكروغرامات لكل متر مكعب. تقف هذه النتائج ضمن، وغالبًا في الطرف العلوي من، المعايير المنشورة، ما يشير إلى أن الجمع بين عدة مصادر بيانات يحسّن بالفعل رؤية المدينة.
ما يكشفه الإطار على الأرض
نظرًا لأن كل المهام تعمل داخل نفس الإطار، تعزز مخرجاتها بعضها بعضًا. تساعد خرائط المباني التفصيلية في توضيح أماكن سكن وعمل الناس فعليًا، مما يُحسّن بدوره أنماط الحركة والتلوث. تُبرز خرائط استخدام الأراضي الأحياء التي تفتقر إلى الحدائق، بينما تُحدد توقعات الحركة نقاط الاختناق المتكررة في ساعات الذروة التي قد تستفيد من إشارات أذكى أو نقل عام أفضل. تُظهر تنبؤات جودة الهواء متى وأين من المرجح أن ترتفع جزيئات السخام الدقيقة، مما يزوّد المسؤولين أساسًا لاستهداف ضوابط الانبعاثات. وعلى الرغم من أن النهج يعتمد على القدرة الحاسوبية ويورث بعض الثغرات الناتجة عن خرائط المتطوعين المتفاوتة والمجسات النادرة، فإن تصميمه المعياري يعني أن مدنًا أخرى ذات تغطية خريطة وأقمار صناعية أساسية يمكنها اعتماده.
ما يعنيه هذا للمدن المستقبلية
بعبارات بسيطة، تُظهر الدراسة أن مزج الخرائط المجمعة من الجمهور، والمشاهد الفضائية، وقراءات المجسات مع التعلم العميق يمكن أن يحوّل صورة مجزأة للمدينة إلى دليل متماسك عالي الدقة للقرارات اليومية. بدلًا من التعامل مع استخدام الأراضي، والحركة، وجودة الهواء كقضايا منفصلة، يربط هذا الإطار بينها في نظام واحد قابل للتكيّف. بالنسبة للسكان، قد يترجم ذلك إلى وقت أقل في الازدحام، ومساحات خضراء أكثر، وهواء أنظف. أما بالنسبة للمخططين وصانعي السياسات، فسيقدم وصفة قابلة للتوسع لبناء مدن ذكية ومستدامة دون الاعتماد حصريًا على بيانات مرخصة ومكلفة.
الاستشهاد: Chen, Y., Afandi, W.S., Gura, D. et al. A unified deep learning framework integrating OpenStreetMap for multi-domain urban planning tasks. Sci Rep 16, 10870 (2026). https://doi.org/10.1038/s41598-026-45927-x
الكلمات المفتاحية: التخطيط الحضري, OpenStreetMap, التعلم العميق, تنبؤ حركة المرور, جودة الهواء