Clear Sky Science · zh
SODNet:一种面向尺度的高效无人机污水排口检测网络
为什么从空中发现隐蔽管道很重要
许多河流正被将未经处理的废水直接排入水中的管道悄然污染。发现这些污水排口很困难,因为它们可能很小、部分被植被掩埋,或沿着长段河岸分布。该研究展示了小型飞行机器人配合智能且轻量的视觉系统如何从空中自动扫描河道,并实时标记这些隐蔽的污染源。
在弯曲河道上飞行的摄像机
无人机已被用于拍摄河流和海岸线,提供广域视角和频繁的覆盖。到目前为止,人们通常需要人工逐张查看成千上万张航拍照片以寻找可疑管道,这既慢又容易出错。作者认为,如果要定期监测大型河流系统并快速应对新的非法或意外排放,自动检测是必不可少的。

大目标与微小目标的挑战
污水排口在不同无人机图像中的呈现并不相同。当无人机低飞时,排口可能占据画面很大一部分;当无人机高飞时,则可能缩小为仅有几个模糊像素。阳光、阴影、植物和河岸进一步遮掩了视觉线索。标准计算机视觉系统在面对这种尺度混合和杂乱背景时往往很难兼顾,常常错过最小或最隐蔽的排口。与此同时,无人机上的计算资源和内存受限,因此在台式机上表现良好的大型、运行缓慢的模型在飞行中无法使用。
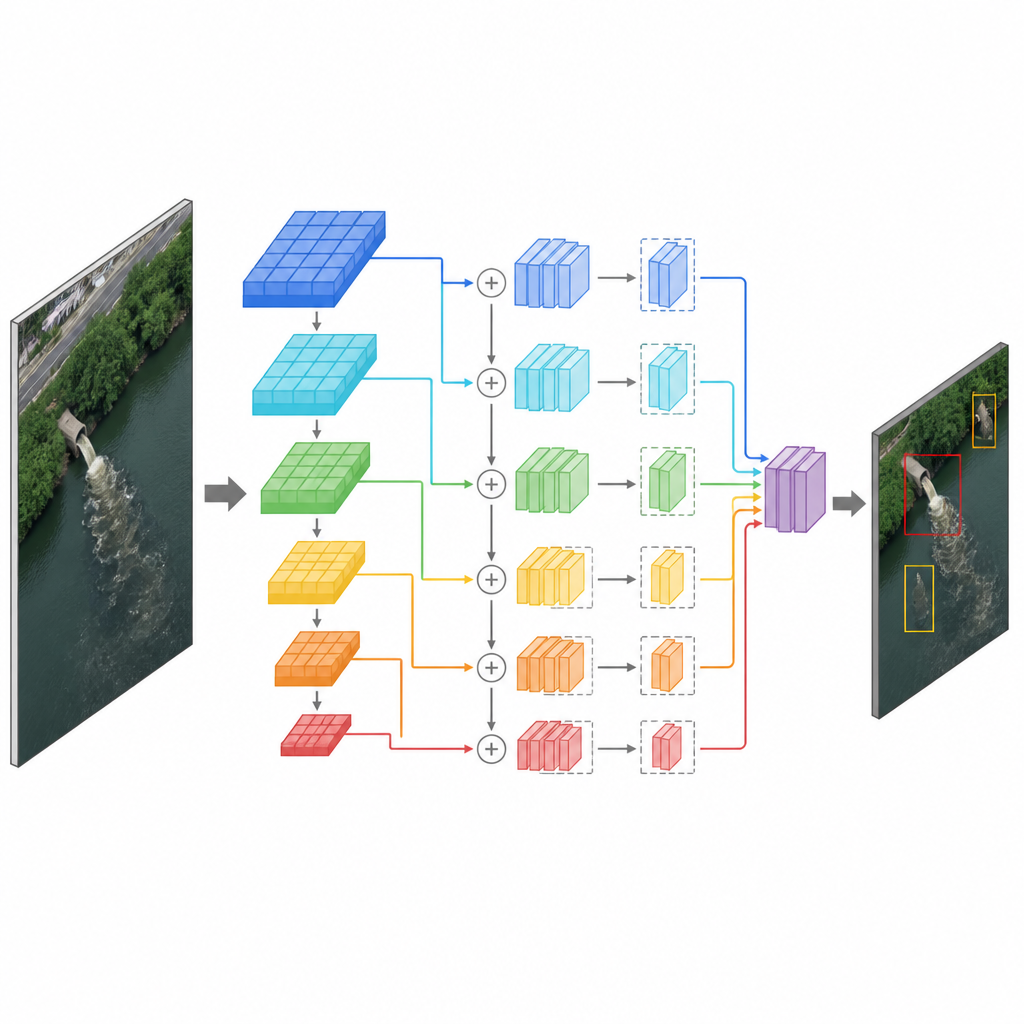
为无人机设计的尺度感知之眼
为同时解决精度与速度问题,研究者构建了一种名为 SODNet 的新型检测系统。它基于一种流行的实时目标检测器,但重塑了融合不同细节层信息的部分。一个新的模块——高效上下文特征金字塔网络(Efficient Context Feature Pyramid Network)——教会模型关注每个候选管道周围的更广阔场景,同时弱化混淆的背景纹理。另一个机制——自适应上下文特征融合(Adaptive Context Feature Fusion)——允许更高层、更抽象的模式指导如何合并细微的边缘和纹理细节,从而帮助网络同时保持对微小与大型排口的可见性。
用更少的数字齿轮做更多事
团队还重新设计了检测器的“头部”,即系统决定图像中何处是管道以及其位置的部分。他们的多尺度分组融合模块(Multi Scale Grouped Fusion)将特征拆分为若干部分,并以不同的虚拟镜头尺寸处理这些部分,以更好地捕捉小型和大型结构,然后高效地将它们重新组合。为了进一步加速,他们还采用了通道剪枝(channel pruning),这是一种裁剪很少使用内部通路的方法,使得仅保留最有用的通路。这种深度压缩保留了整体结构,但减少了计算量,就像在保留功能的同时移除机器中的备用齿轮。
这只智能无人机之眼的表现如何
研究者在一个专门的数据集上训练和测试了 SODNet,该数据集包含来自中国主要流域的一万多张污水排口图像,涵盖多种排口类型和光照条件。与基线模型相比,他们的方法在提升检测精度的同时将参数数量减少了四分之三以上,所需计算量也几乎降低到同一比例。在实验室测试中,经裁剪的 SODNet 版本每秒处理的图像数量是原始版本的两倍多。当部署在类似无人机上可搭载的紧凑 Jetson Xavier NX 计算机上时,它仍能处理每秒四十多帧,足以满足实时河道巡逻的需求。
通过更智能的监测实现更清洁的河流
对读者而言,关键信息是:现有的中等规模电池供电无人机现在可以扫描长段河道,并以高精度自动识别大多数污水排口。SODNet 表明,精心的设计可以在兼顾微小与大型目标的锐利视觉和适用于现场硬件的快速低功耗计算之间取得平衡。尽管该系统可能仍会错过一些最微妙的情况,但它为支持巡查人员、改进常规监测并更快地对威胁生态系统与人类健康的新污染源发出警报提供了实用工具。
引用: Zeng, L., Liu, X., Dai, B. et al. SODNet: a scale-oriented detection network for efficient UAV-based sewage outfall detection. Sci Rep 16, 15103 (2026). https://doi.org/10.1038/s41598-026-45595-x
关键词: 污水排口检测, 无人机监测, 水污染, 轻量级深度学习, 目标检测