Clear Sky Science · tr
SODNet: verimli İHA tabanlı kanalizasyon çıkışı tespiti için ölçek odaklı bir algılama ağı
Gökyüzünden gizli boruları görmek neden önemli
Birçok nehir, arıtmadan geçirilmemiş atık suyu doğrudan suya boşaltan borular tarafından sessizce kirletiliyor. Bu kanalizasyon çıkışlarını bulmak zordur çünkü küçük olabilirler, bitki örtüsüne kısmen gömülmüş olabilirler veya nehir kıyısı boyunca uzun mesafelere yayılabilirler. Bu çalışma, küçük uçan robotların hafif ama akıllı bir görme sistemiyle birleştiğinde nehirleri havadan otomatik olarak tarayabileceğini ve bu gizli kirleticileri gerçek zamanlı olarak işaretleyebileceğini gösteriyor.
Dolaşan nehirlerin üzerinde uçan kameralar
İnsansız hava araçları yani dronlar, nehirleri ve kıyıları fotoğraflamak için zaten kullanılıyor; geniş görüş ve sık aralıklı kayıt imkanı sağlıyorlar. Bugüne dek insanlar şüpheli boruları aramak için genellikle binlerce hava fotoğrafını gözle incelemek zorundaydı; bu yavaş ve hata yapmaya açık bir yöntem. Yazarlar, geniş nehir sistemlerini düzenli olarak izlemek ve yeni yasa dışı ya da kazara gerçekleşen deşarjlarla hızla başa çıkmak istiyorsak otomatik tespitin zorunlu olduğunu savunuyor.

Büyük ve küçük hedeflerin zorluğu
Kanalizasyon çıkışları her drone görüntüsünde aynı görünmez. Drone alçakta olduğunda bir boru çerçevenin büyük bir kısmını kaplayabilir, fakat yüksekteyken birkaç bulanık piksel kadar küçülebilir. Güneş ışığı, gölgeler, bitkiler ve nehir kıyıları görsel ipuçlarını daha da saklar. Standart bilgisayarlı görme sistemleri bu karışık boyutlar ve karmaşık arka planlarla baş etmekte zorlanır; genellikle en küçük veya en gizlenmiş çıkışları kaçırırlar. Aynı zamanda, drone bilgisayarlarının gücü ve belleği sınırlıdır; masaüstünde iyi çalışan hantal, yavaş modeller uçuşta kullanılamaz.
Drone için ölçeğe duyarlı bir göz
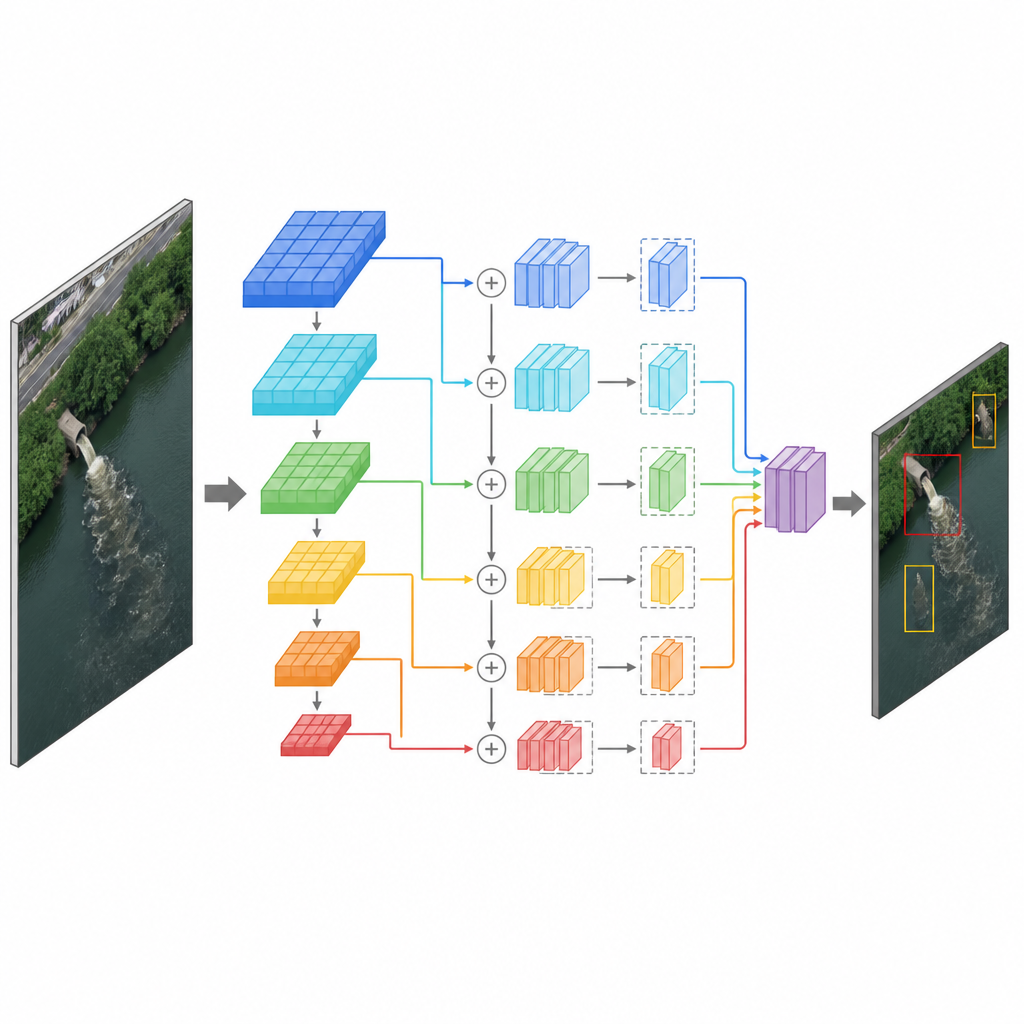
Hem doğruluk hem hız sorunlarını çözmek için araştırmacılar SODNet adında yeni bir algılama sistemi geliştirdiler. Bu sistem, popüler bir gerçek zamanlı nesne algılayıcıya dayanıyor ama farklı ayrıntı seviyelerinden gelen bilgileri birleştiren parçaları yeniden şekillendiriyor. Yeni bir modül olan Efficient Context Feature Pyramid Network, modele her aday borunun çevresindeki daha geniş sahneye dikkat etmeyi öğretirken karıştırıcı arka plan dokularını bastırıyor. Diğer bir mekanizma olan Adaptive Context Feature Fusion ise soyut düzeydeki yüksek seviye desenlerin ince kenar ve doku ayrıntılarının nasıl birleştirileceğini yönlendirmesine izin veriyor; bu, hem çok küçük hem de büyük çıkışların ağ tarafından görülmesini korumaya yardımcı oluyor.
Daha az dijital dişliyle daha fazlasını yapmak
Takım ayrıca algılayıcının nerede boru olduğunu ve görüntüdeki konumunu belirleyen “baş” kısmını yeniden tasarladı. Multi Scale Grouped Fusion modülleri özellikleri parçalara böler ve hem küçük hem büyük yapıları daha iyi yakalamak için farklı sanal mercek boyutlarıyla işler, ardından bunları verimli şekilde yeniden birleştirir. Hızı daha da artırmak için kanal budama (channel pruning) uyguladılar; nadiren kullanılan iç yolları kırparak yalnızca en yararlı yolları bırakmanın bir yolu. Bu derin sıkıştırma, genel yapıyı korurken hesaplamaların sayısını azaltır; tıpkı bir makinenin işlevini sürdürürken yedek dişlileri çıkarmaya benzer.
Akıllı drone gözünün performansı nasıl
Araştırmacılar SODNet’i Çin’deki büyük nehir havzalarından toplanmış on binden fazla kanalizasyon çıkışı görüntüsünden oluşan özel bir veri seti üzerinde eğitti ve test etti; veri seti birçok çıkış türünü ve aydınlatma koşulunu kapsıyordu. Temel modele kıyasla, yaklaşımları tespit doğruluğunu artırırken parametre sayısını üçte ikiden fazla azalttı ve gerekli hesaplamaları neredeyse aynı oranda düşürdü. Laboratuvar testlerinde, budanmış SODNet sürümü orijinaline göre saniyede iki kattan fazla görüntü işledi. Bir drone’a takılabilecek benzer kompakt Jetson Xavier NX bilgisayarına kurulduğunda bile saniyede kırkın üzerinde görüntü işleyebildi; bu da gerçek zamanlı nehir devriyesi için yeterince hızlıdır.
Daha akıllı izleme ile daha temiz nehirler
Okuyucular için ana mesaj, artık mütevazı, bataryayla çalışan dronların uzun nehir kesitlerini tarayıp çoğu kanalizasyon çıkışını yüksek doğrulukla otomatik olarak tespit edebilecek durumda olduğudur. SODNet, dikkatli tasarımın hem küçük hem büyük hedefler için keskin bir görüşü, hem de saha donanımı için uygun hızlı, düşük güçlü hesaplamayla dengeleyebileceğini gösteriyor. Sistem hâlâ en ince vakaların bazılarını kaçırabilir, ancak müfettişleri destekleyecek, rutin izlemeyi iyileştirecek ve ekosistemleri ile insan sağlığını tehdit eden yeni kirlilik kaynaklarına daha hızlı uyarılar sağlayacak pratik bir araç sunuyor.
Atıf: Zeng, L., Liu, X., Dai, B. et al. SODNet: a scale-oriented detection network for efficient UAV-based sewage outfall detection. Sci Rep 16, 15103 (2026). https://doi.org/10.1038/s41598-026-45595-x
Anahtar kelimeler: kanalizasyon çıkışı tespiti, İHA izleme, su kirliliği, hafif derin öğrenme, nesne algılama