Clear Sky Science · zh
使用局部调整离散布谷鸟搜索的城市垃圾管理路线优化:一种混合元启发式方法
为城市垃圾车规划更智能的路径
满溢的垃圾桶、在交通中被困的噪音卡车以及不断上涨的燃油费用,都是当今城市垃圾收集方式的副产物。随着城市人口增长,仅仅增加更多卡车或增加收运轮次既昂贵又污染。本研究探讨了一种新的垃圾车路线规划方式,使相同的垃圾桶在驾驶里程、燃料和时间上大幅减少——帮助城市在无需昂贵硬件的情况下朝更清洁的街道和更低的碳排放前进。
为何垃圾收集路线很重要
现代城市产生大量固体废弃物,其中很大一部分仍依赖固定时间表和大量人工的路线规划来收集。这常常导致卡车重复绕行,漏掉部分垃圾桶而对其他垃圾桶过于频繁回访,并在交通中浪费燃料。这个问题不仅是物流上的;它还有环境后果,因为更长的路线意味着燃料消耗增加、温室气体排放更多。与此同时,在成千上万个垃圾桶中安装并维护电子传感器既昂贵又具有技术挑战性,尤其在密集或低收入社区更为困难。作者认为,要使垃圾收集既高效又可持续,城市需要能够基于可实际获得数据运行的更好路线规划方法。
用“天眼”替代传感器
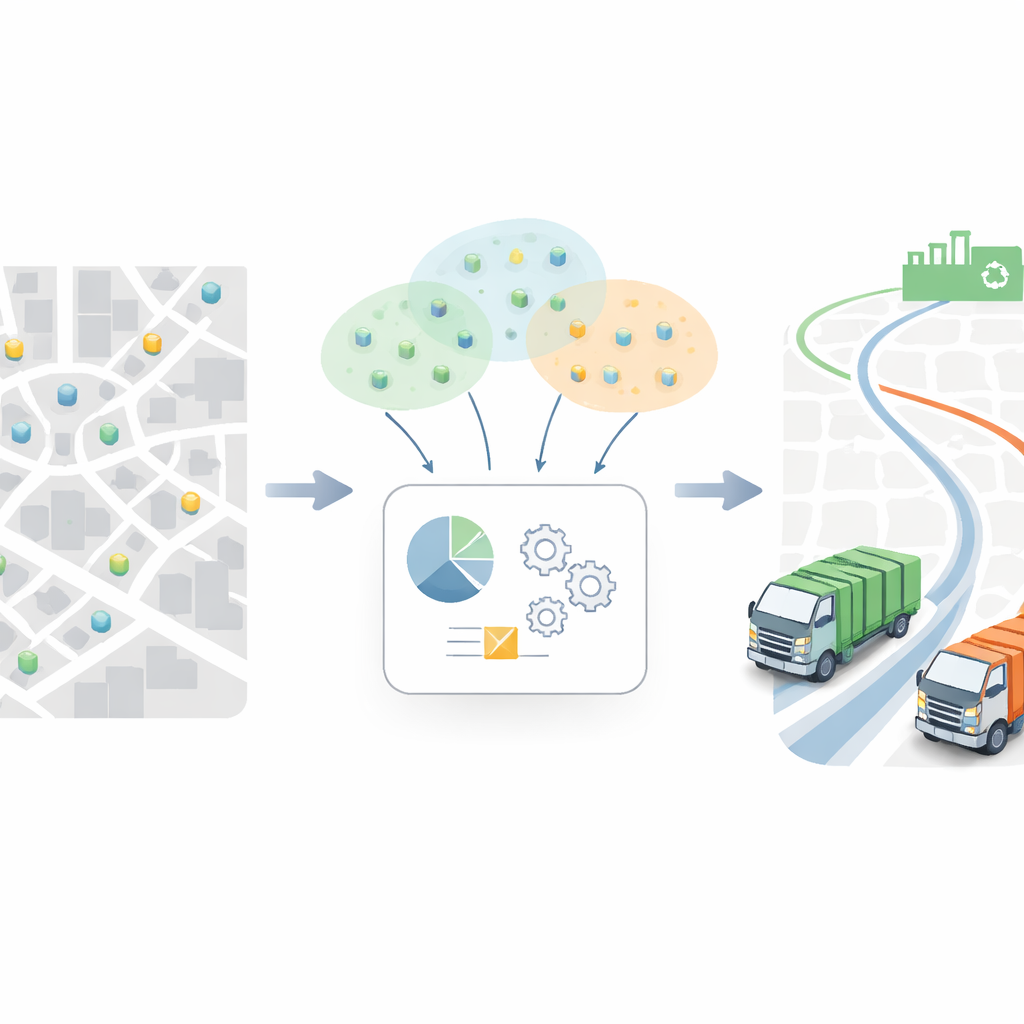
研究人员没有在每个垃圾桶里装电子设备,而是借助卫星影像和制图工具。他们使用 Google Earth Engine 和高分辨率的 Sentinel-2 图像来识别印度主要城市班加罗尔部分区域的公共垃圾桶位置。半自动图像处理技术突出显示可能的垃圾桶形状,并用简单的几何规则过滤明显的误报。最终得到一张包含 232 个经验证垃圾桶位置的地图,每个垃圾桶用带有地理坐标的点表示。该地图成为规划卡车行驶路线的起点:每个垃圾桶都是必须访问的停靠点,核心挑战是找到覆盖所有垃圾桶同时最小化行驶距离及相关成本的路线。
一种受自然启发的路线规划器
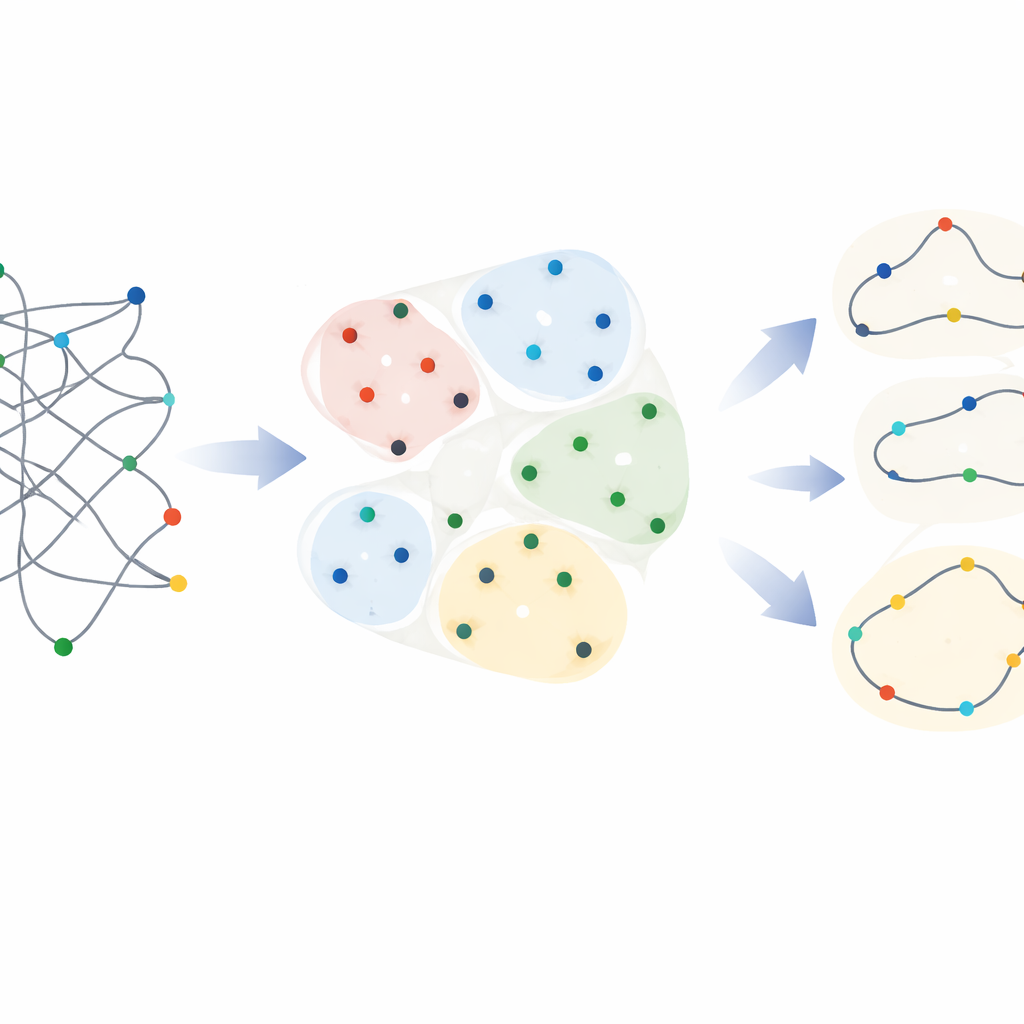
为了解决这一难题,研究提出了一种新的计算方法,称为局部优化离散布谷鸟搜索(LO-DCS)。其灵感来自布谷鸟将卵寄放在其他鸟巢中的行为,以及自然界如何在众多可能性中探索和筛选。在该算法中,每一种可能的卡车路线被视为一个候选“巢”。方法以受控的方式打乱垃圾桶访问顺序,探索不同的路线模式。一个简单但强大的改进步骤反复交换道路片段对,以检验是否能缩短总距离,消除不必要的折返和交叉。由于城市规模较大,算法先将附近垃圾桶分组为簇,然后分别对每组进行优化,这样既能保持搜索的可管理性,又能涵盖整个服务区域。
新方法的性能如何
研究人员在班加罗尔数据集上测试了 LO-DCS,并将其与若干知名规划工具进行比较,包括遗传算法、粒子群方法和其他近期的搜索技术。他们在相同设置下多次运行每种方法,以检验平均性能和稳定性。在三个垃圾桶簇中,这种新方法将原本非优化设置下超过 400 公里 的行驶距离缩减到优化后每簇不足 70 公里。与未规划路线相比,这转化为在关键指标——距离、燃料消耗、碳排放和行驶时间——上约 85% 的平均改善。与其他先进算法相比,LO-DCS 平均仍实现约 78% 的更好表现。统计检验确认这些提升并非偶然,并且在较小规模问题上与精确数学求解器的详细比对表明,所得路线非常接近理论最优解。
对日常城市生活的意义
简而言之,该研究表明城市可以仅凭从影像中获得的位置信息和一个设计良好的规划算法,让垃圾车行驶更智能的路线。无须在每个垃圾桶安装传感器,市政机构即可减少卡车里程、缩减燃料预算并降低碳排放,同时保持街道清洁。尽管该方法无法保证数学上的绝对最优路线且仍依赖静态垃圾桶位置,但它提供了一个实用且可扩展的起点,日后可与实时交通或满载度数据结合。对居民而言,影响将是卡车带来的噪音与拥堵减少、环境足迹变小——这些都是通过更好利用信息和巧妙优化实现的,而非大规模新基础设施建设。
引用: Goswami, A., N. V., P., P., P. et al. Route optimization in urban waste management using locally adjusted discrete cuckoo search: a hybrid metaheuristic approach. Sci Rep 16, 10097 (2026). https://doi.org/10.1038/s41598-026-40208-z
关键词: 城市垃圾收集, 路线优化, 元启发式算法, 智慧城市, 可持续物流