Clear Sky Science · sv
Ruttoptimering i stadsavfallshantering med lokalt justerad diskret gökhäckningssökning: en hybrid metaheuristisk metod
Smartere rutter för stadens sopbilar
Överfyllda soptunnor, bullriga lastbilar fast i trafik och stigande drivmedelskostnader är alla konsekvenser av hur städer idag samlar in avfall. När den urbana befolkningen växer är det både dyrt och förorenande att enbart sätta in fler fordon eller fler tömningsrundor. Denna studie undersöker ett nytt sätt att planera sopbilsrutter så att samma tunnor töms med mycket mindre körsträcka, bränsle och tid — vilket hjälper städer att röra sig mot renare gator och lägre koldioxidutsläpp utan dyr hårdvara.
Varför rutter för avfallsinsamling spelar roll
Moderna städer producerar stora mängder fast avfall, mycket av det samlas fortfarande in med fasta scheman och i hög grad manuell ruttplanering. Det leder ofta till att fordon kör onödiga rundor, missar vissa kärl samtidigt som de återkommer till andra för ofta, och slösar bränsle i trafiken. Problemet är inte bara logistiskt; det har även miljökonsekvenser eftersom längre rutter innebär mer förbrukat bränsle och högre utsläpp av växthusgaser. Samtidigt är det dyrt och tekniskt utmanande att installera och underhålla elektroniska sensorer i tusentals kärl, särskilt i tätt bebyggda eller låginkomstområden. Författarna menar att för att göra avfallsinsamling både effektiv och hållbar behöver städer bättre ruttplaneringsmetoder som kan fungera med de data de realistiskt kan få fram.
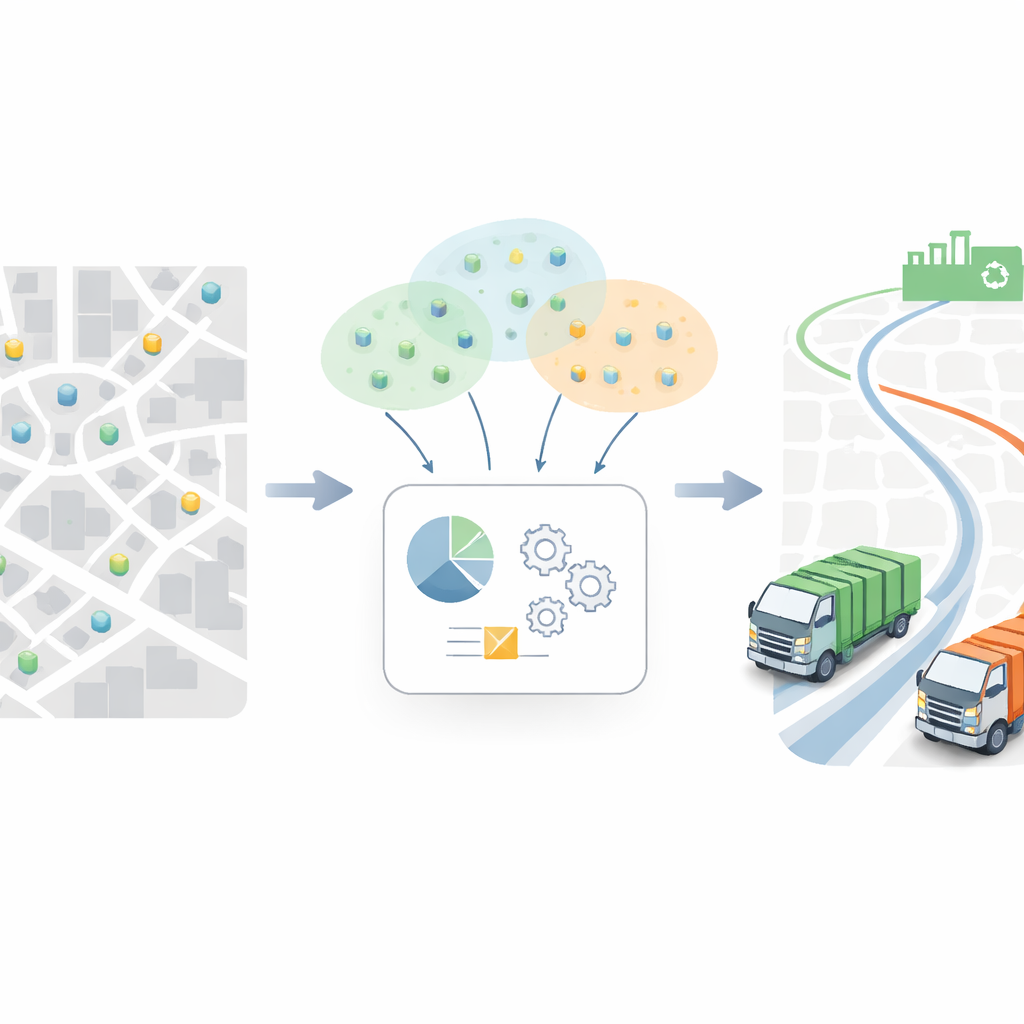
Använda ögon från ovan istället för sensorer
I stället för att fylla varje kärl med elektronik vänder forskarna sig till satellitbilder och kartläggningsverktyg. De använder Google Earth Engine och högupplösta Sentinel-2-bilder för att identifiera platser för offentliga soptunnor i en del av Bengaluru, en stor indisk stad. Semi-automatiska bildbehandlingsmetoder framhäver sannolika kärlformer, och enkla geometriska regler sorterar bort uppenbara felaktiga träffar. Slutresultatet blir en karta över 232 verifierade kärlplatser, vardera representerad som en punkt med geografiska koordinater. Denna karta blir utgångspunkten för att planera hur fordonen ska röra sig: varje kärl är ett stopp som måste besökas, och den centrala utmaningen är att hitta rutter som täcker alla kärl samtidigt som körsträckan och tillhörande kostnader minimeras.
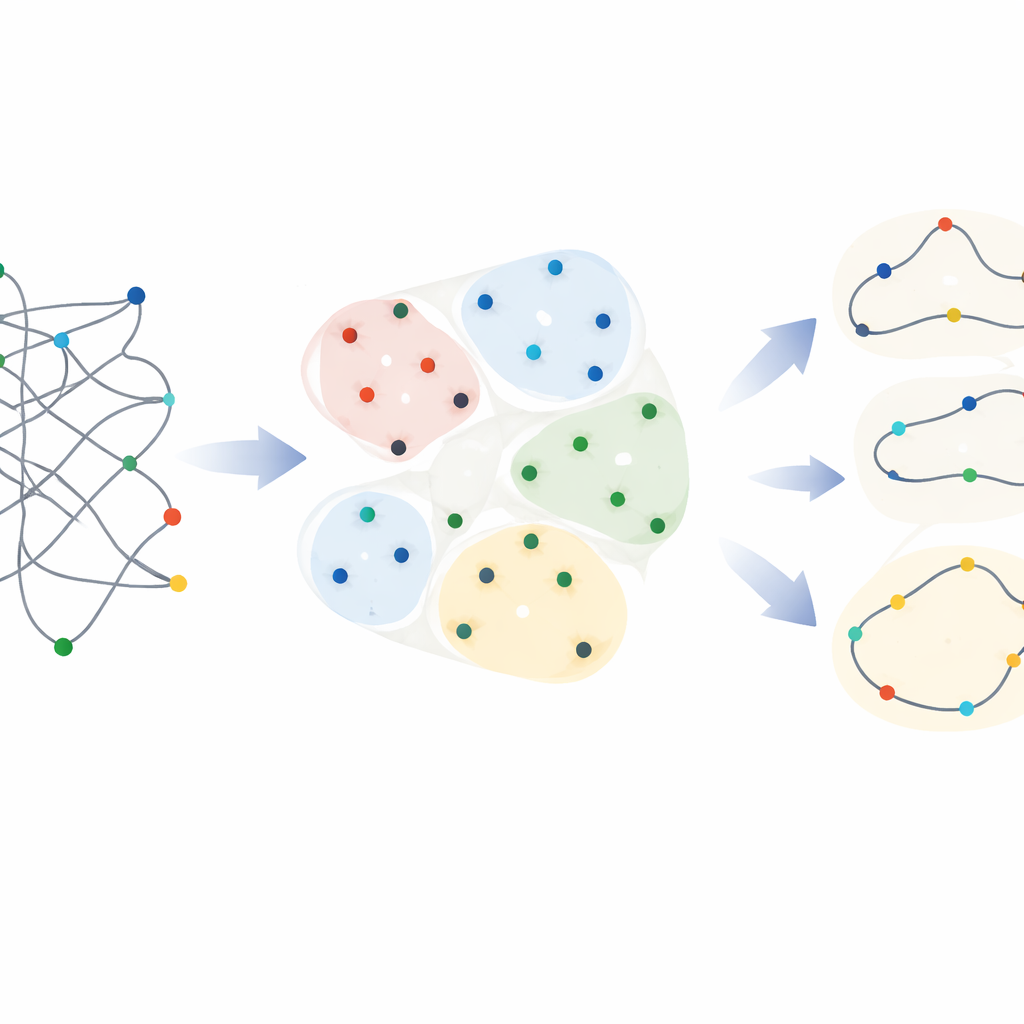
En naturinspirerad ruttplanerare
För att lösa detta pussel presenterar studien en ny beräkningsmetod kallad Lokalt Optimerad Diskret Gökhäckningssökning (LO-DCS). Den är inspirerad av gökens beteende, som lägger ägg i andra fåglars bon, och av hur naturen utforskar och filtrerar många möjligheter. I algoritmen behandlas varje möjlig rutt för ett fordon som ett kandidat-”bo”. Metoden blandar ordningen på kärlbesöken på ett kontrollerat sätt för att utforska olika ruttmönster. Ett enkelt men kraftfullt förbättringssteg byter upprepade gånger par av vägsegment för att se om den totala sträckan kan förkortas, vilket tar bort onödiga återvändsgränder och korsningar. Eftersom staden är stor grupperar algoritmen först närliggande kärl i kluster och optimerar sedan varje grupp separat, vilket håller sökningen hanterbar samtidigt som hela serviceområdet täcks.
Hur väl den nya metoden presterar
Forskarna testar LO-DCS på Bengaluru-datasetet och jämför det med flera välkända planeringsverktyg, inklusive genetiska algoritmer, partikel-svärmsmetoder och andra moderna söktekniker. De kör varje metod många gånger under samma inställningar för att kontrollera både genomsnittlig prestanda och konsekvens. Över tre kärlkluster kapar den nya metoden körsträckan från över 400 kilometer i en naiv, icke-optimerad uppställning till under 70 kilometer per kluster efter optimering. Detta motsvarar genomsnittliga förbättringar på cirka 85 % i nyckelmått — distans, bränsleförbrukning, koldioxidutsläpp och resetid — jämfört med de oplanerade rutterna. Mot de andra avancerade algoritmerna uppnår LO-DCS fortfarande ungefär 78 % bättre prestanda i genomsnitt. Statistiska tester bekräftar att dessa vinster inte bara beror på slump, och detaljerade kontroller mot exakta matematiska lösare för mindre problem visar att rutterna ligger mycket nära de teoretiskt bästa möjliga.
Vad detta betyder för vardagslivet i staden
Enkelt uttryckt visar studien att städer kan få sopbilar att köra betydligt smartare rutter med endast positionsdata härledd från bilder och en väl utformad planeringsalgoritm. Utan att installera sensorer i varje kärl kan kommunala myndigheter minska fordonens körsträcka, krympa bränslebudgetar och reducera koldioxidutsläpp samtidigt som gatorna hålls renare. Även om metoden inte garanterar matematiskt perfekta rutter och fortfarande förutsätter statiska kärlplatser ger den en praktisk, skalbar utgångspunkt som senare kan kombineras med realtidsdata om trafik eller fyllnadsnivåer. För invånarna skulle effekten bli mindre buller och trängsel från lastbilar och ett mindre ekologiskt fotavtryck — allt åstadkommet genom bättre informationsanvändning och smart optimering snarare än omfattande ny infrastruktur.
Citering: Goswami, A., N. V., P., P., P. et al. Route optimization in urban waste management using locally adjusted discrete cuckoo search: a hybrid metaheuristic approach. Sci Rep 16, 10097 (2026). https://doi.org/10.1038/s41598-026-40208-z
Nyckelord: insamling av stadens avfall, ruttoptimering, metaheuristiska algoritmer, smarta städer, hållbar logistik