Clear Sky Science · zh
在软双连续复合材料中耦合可编程形状变形与溶剂驱动推进
能自行移动和变形的软材料
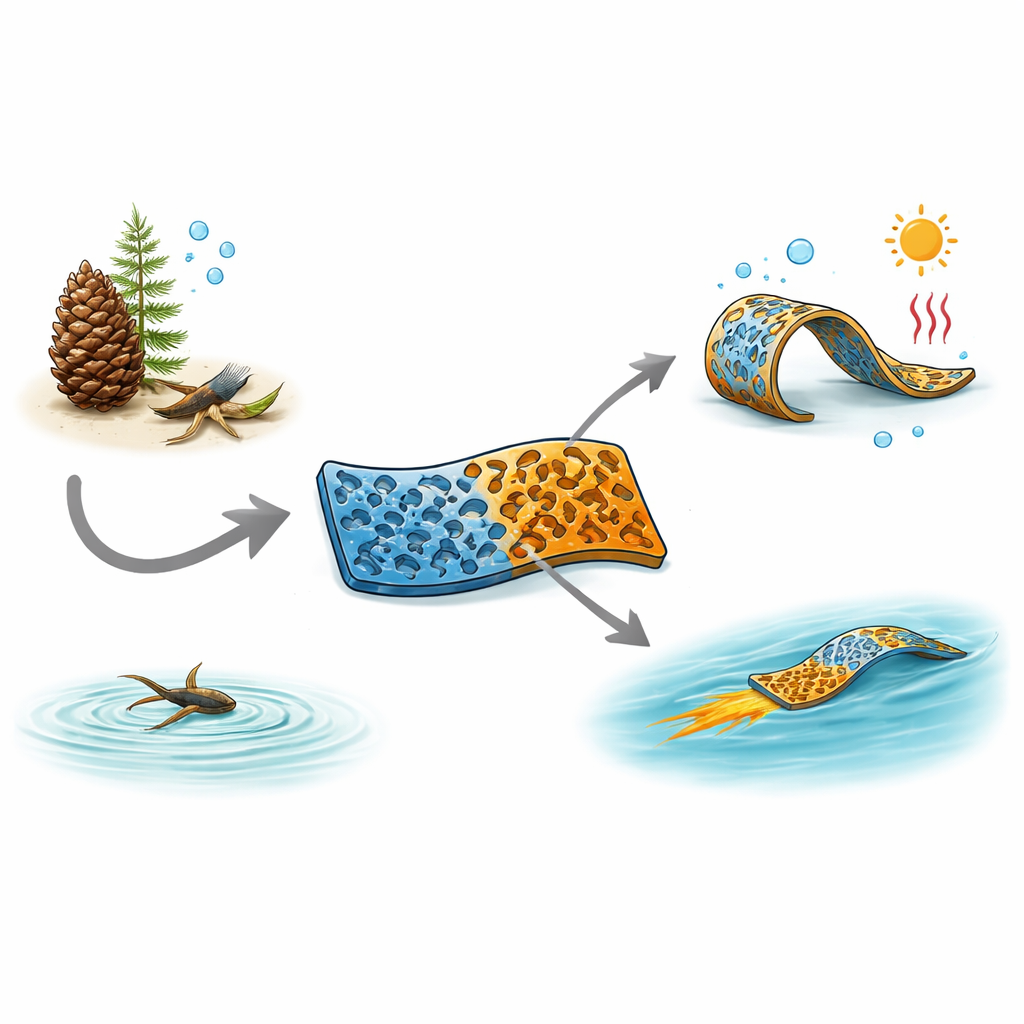
想象一条漂浮的橡胶状带材,能够像雨天的松果那样卷曲与展开,然后像某些甲虫一样在池面滑行,仅靠少量液体燃料自行推进。该研究正介绍了这样一种智能软材料。它既可以重新配置形状,又能在没有电线、马达或电子装置的情况下在水面自我推进,这为未来的软体机器人、涂层和响应环境的微型化学工具提供了可能。
向松果与会走水的甲虫学习
在自然界中,生物系统常常利用两类截然不同的运动。有些,比如松果或含羞草叶片,会在湿度、触碰或温度变化时就地改变形状。另一些,例如某些甲虫和细菌,则会通过释放表面活性分子在水面上移动,从一个位置到另一个位置。工程师已经用合成材料再现了各自的部分行为,但很少将两者整合到同一平台中。典型的液晶弹性体可以随热或光弯曲和收缩,但与水的相互作用较差且难以产生推进力。相比之下,水凝胶亲水且膨胀显著,但通常向各个方向膨胀,缺乏引导运动或产生净力所需的内在方向性。
构建双网络软复合材料
为弥合这一差距,研究人员设计了一种名为 BALCEH 的混合材料,来自“双连续液晶弹性体—水凝胶复合材料”的缩写。BALCEH 的核心将两种连续且交织的网络结合在一起:亲水的水凝胶和疏水的液晶弹性体。水凝胶形成多孔骨架,能吸收多种液体,而弹性体被精心拉伸并锁定成单一优选方向,使其内部构件排列一致。这种组合结构在同一材料中同时实现了强烈的膨胀能力与方向性弹性。显微镜、红外光谱、拉曼散射和 X 射线散射的测量结果证实两网络深入互穿,液晶段排列良好,复合材料在力学上既坚韧又柔韧,同时沿排列方向明显更强。
可切换表面与可逆形变
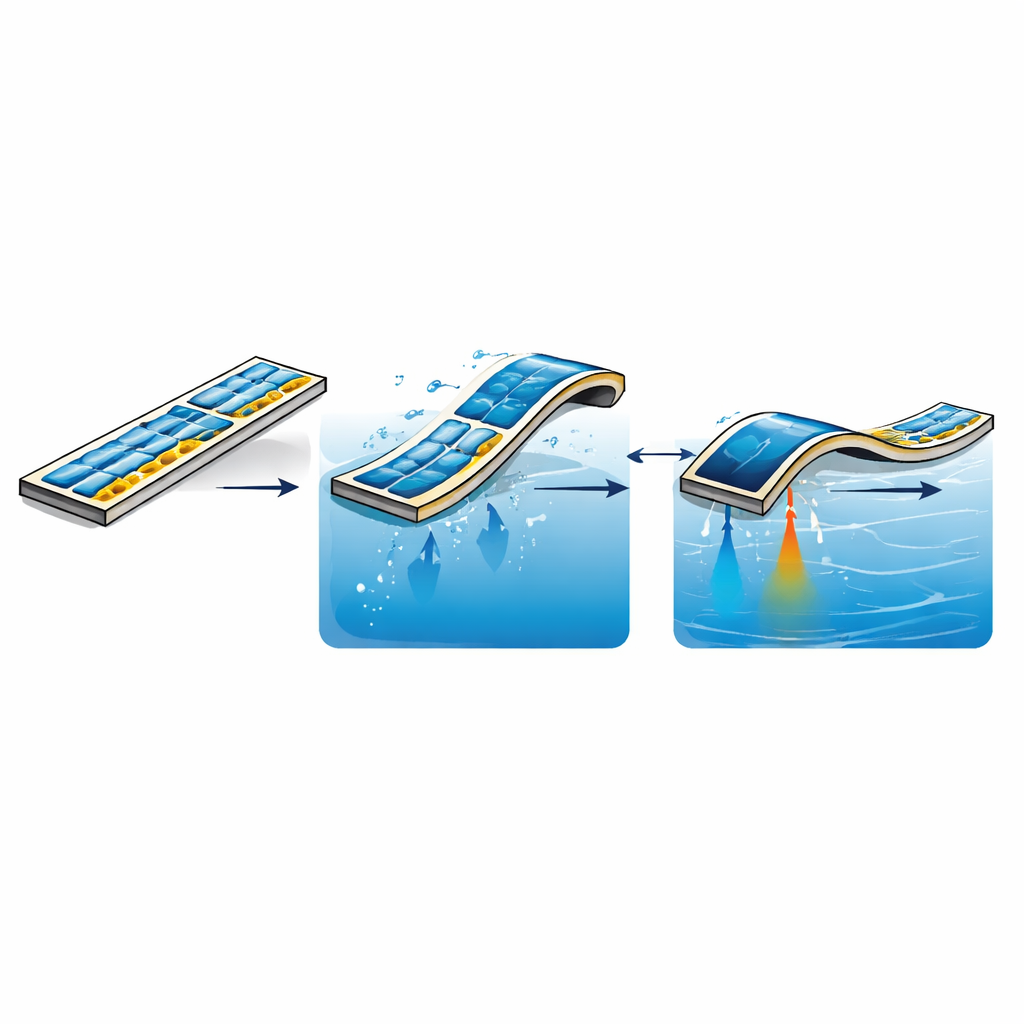
交织的网络赋予 BALCEH 一种环境“变色龙”行为。由于水凝胶偏爱水而弹性体偏爱油,暴露在外界时材料表面所呈现的特性会随周围液体类型而翻转。在水中,水凝胶占主导,使表面对油滴呈强烈排斥;在油中,弹性体占优,则将水排斥在外。这种可适应的润湿性——在相应环境下对油或水表现出极强的排斥性——可用于智能过滤和抗污涂层。同时,两种网络在内部相互拉扯:当 BALCEH 吸收水或其他极性溶剂时,水凝胶试图膨胀,尤其是沿着与排列弹性体垂直的方向,而弹性体则抵抗并储存弹性能量。其结果是可控的弯曲或展开,可在多次循环中重复:条带可以在液体中展开、干燥时再卷起,随湿度扭转,或随温度变化而伸短,且不会丧失其预设的形状。
溶剂驱动的滑动与可编程路径
除了就地弯曲外,BALCEH 还能充当微型发动机。当用低表面张力溶剂如乙醇饱和并置于气—水界面时,BALCEH 条带会漂浮并缓慢向周围水体渗出溶剂。由于内部结构的各向异性,这种释放并不均匀,从而产生表面张力不平衡并将条带拉动——这一效应称为马兰戈尼推进。与吸水后很快下沉的普通水凝胶不同,复合材料的疏水组分保持其浮力,使运动可持续数十分钟。通过改变“燃料”溶剂的种类、挥发性及与水的互溶性,团队可以调节条带运动的持续时间和强度。将一个或多个 BALCEH 片段连接到简单的 3D 打印形状上,可以将它们变成软体游动器,其轨迹——圆形、直线、旋转或螺旋外展——可通过几何形状、燃料选择,甚至向池中定时添加其他液体来编程。
从漂浮机器人到智能分离与化学反应
相同的基本原理还支持其他功能。作者演示了 BALCEH 涂层织物能够在重力作用下将油与水分离,因为复合材料的两面分别选择性地允许一种液体通过而阻挡另一种。在另一个示例中,星形的 BALCEH 执行器将固态反应物小珠搬运穿越层状油—水体系,并仅在水触发材料展开时释放该小珠,从而在特定时间和位置启动化学反应,实质上将反应的开启与逻辑控制集成在一起。这些演示表明,将具有方向性的弹性网络与响应性膨胀网络结合,使单一软材料既能感知环境又能将信息转换为复杂行动。
这对未来软体机器的意义
对非专业读者而言,关键结论是该工作将两类运动——形变与自推进——融合入一种稳健、可重复使用的材料中。BALCEH 在遇到水、湿度、热或者某些溶剂时会弯曲与扭转,并且仅靠少量有机液体就能在水面滑行。由于其响应取决于周围流体类型和材料预先设定的排列方向,因此可以被编程以遵循特定路径、携带载荷、触发反应或在无需电子器件或刚性部件的情况下分离混合物。这种在单一轻质条带中将变形与运动耦合的能力预示着可在现实湿润环境中自主运行的软体机器人设备与功能性涂层的发展方向。
引用: Giri, P., Borbora, A., Sarkar, D. et al. Coupling programmable shape morphing and solvent-fueled propulsion in a soft bicontinuous composite. Nat Commun 17, 3638 (2026). https://doi.org/10.1038/s41467-026-69432-x
关键词: 软体机器人, 智能材料, 水凝胶复合材料, 自驱动, 可变润湿性