Clear Sky Science · en
Coupling programmable shape morphing and solvent-fueled propulsion in a soft bicontinuous composite
Soft Materials That Move and Change Shape on Their Own
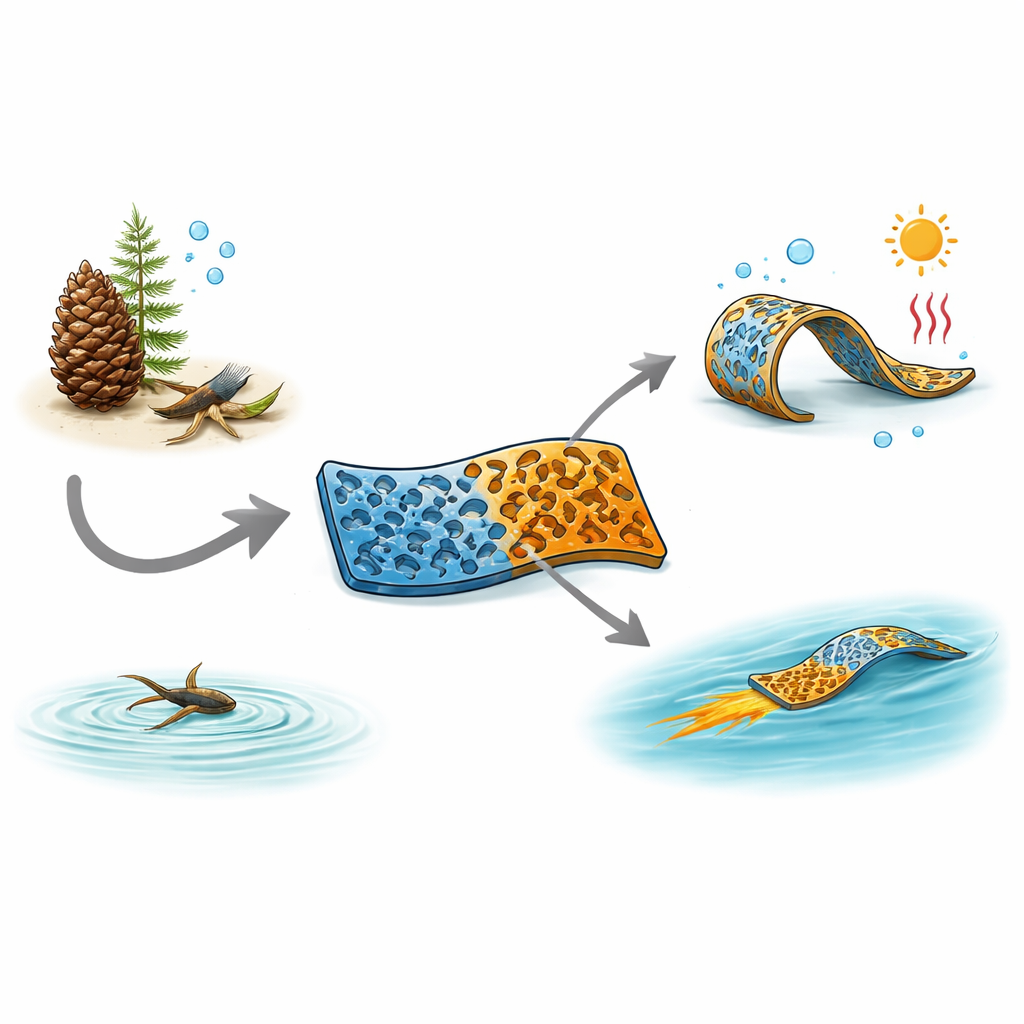
Imagine a floating strip of rubbery material that can curl and uncurl like a pinecone on a rainy day, and then glide across a pond the way some beetles do, powered only by a bit of liquid fuel. This study introduces just such a smart, soft material. It can both reconfigure its shape and propel itself across water without wires, motors, or electronics, hinting at future soft robots, coatings, and tiny chemical tools that respond intelligently to their surroundings.
Learning from Pinecones and Water-Walking Beetles
In nature, living systems often use two very different kinds of motion. Some, like pinecones or sensitive leaves, change shape in place when humidity, touch, or temperature shifts. Others, like certain beetles and bacteria, actually move from one spot to another, sometimes by releasing surface-active molecules that pull them along the water surface. Engineers have recreated aspects of each behavior with synthetic materials, but rarely both in a single platform. Typical liquid crystal elastomers can bend and contract with heat or light but do not interact well with water or generate propulsion. Hydrogels, in contrast, love water and swell strongly, yet they usually expand in all directions and lack the built-in directionality needed to guide motion or generate net forces.
Building a Dual-Network Soft Composite
To bridge this gap, the researchers designed a hybrid material called BALCEH, short for a bicontinuous liquid crystal elastomer–hydrogel composite. At its core, BALCEH blends two continuous but interwoven networks: a water-loving hydrogel and a water-shedding liquid crystal elastomer. The hydrogel forms a porous scaffold that can soak up many different liquids, while the elastomer is carefully stretched and locked into a single, preferred direction so its internal building blocks all line up. This paired architecture allows both strong swelling and directional elasticity in the same piece of material. Measurements using microscopy, infrared light, Raman scattering, and X-ray scattering confirm that the two networks are thoroughly interpenetrated, that the liquid crystal segments are well aligned, and that the composite is mechanically tough and flexible while still clearly stronger along the alignment direction.
Switchable Surfaces and Reversible Shape Changes
The intertwined networks give BALCEH a kind of environmental “chameleon” behavior. Because the hydrogel prefers water and the elastomer prefers oil, the surface that each presents to the outside world can flip depending on which liquid is around. Under water, the hydrogel dominates and makes the surface repel oil droplets very strongly; under oil, the elastomer takes over and the surface pushes water away instead. This adaptive wetting, with extreme repellency to either oil or water in the right setting, could be useful for smart filters and anti-fouling coatings. At the same time, the two networks tug against each other internally. When BALCEH absorbs water or other polar solvents, the hydrogel tries to swell, especially across the direction of the aligned elastomer, while the elastomer resists and stores elastic energy. The result is a controlled bending or unbending that repeats over many cycles: strips can unfurl in liquid and refurl as they dry, twist with humidity, or shorten and lengthen with temperature changes, all without losing their preprogrammed shapes.
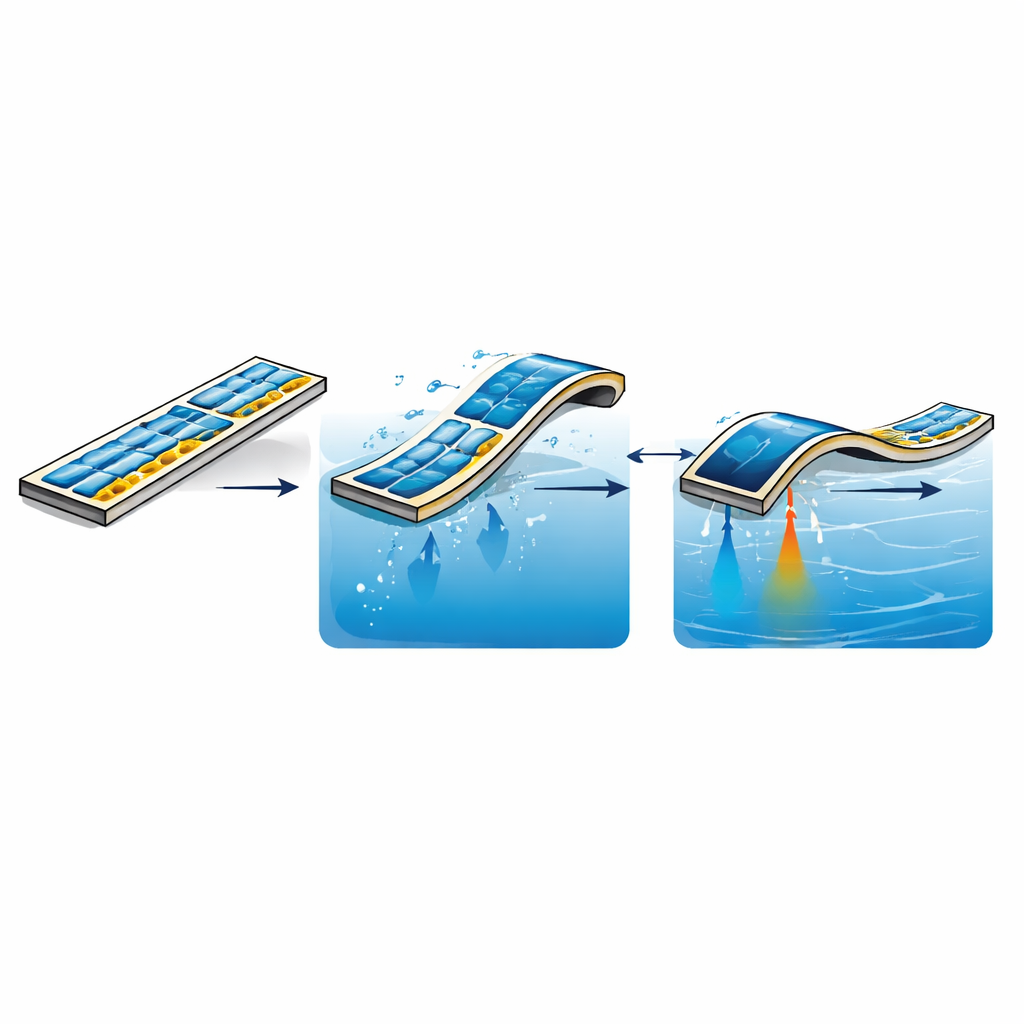
Solvent-Fueled Gliding and Programmable Paths
Beyond bending in place, BALCEH can also act as its own tiny engine. When saturated with a low–surface-tension solvent such as ethanol and placed at the air–water interface, a BALCEH strip floats and slowly leaks solvent into the surrounding water. Because of the anisotropic internal structure, this release is uneven, setting up a surface tension imbalance that pulls the strip along—an effect known as Marangoni propulsion. Unlike plain hydrogels, which quickly sink once they take up water, the composite’s hydrophobic component keeps it buoyant, allowing motion that can last tens of minutes. By changing the type of “fuel” solvent, its volatility, and its miscibility with water, the team tunes how long and how strongly the strip moves. Attaching one or more BALCEH pieces to simple 3D‑printed shapes turns them into soft swimmers whose trajectories—circular, straight, rotational, or spiraling outward—can be programmed by geometry, fuel choice, and even timed additions of other liquids to the pool.
From Floating Robots to Smart Separation and Chemistry
The same underlying principles enable other functions. The authors demonstrate that BALCEH-coated fabrics can sort oil from water under gravity alone, because each side of the composite selectively lets one liquid through while blocking the other. In another example, a star-like BALCEH actuator ferries a solid reactant bead through a layered oil–water setup and releases it only when and where water triggers the material to unfold, effectively turning on a chemical reaction with built-in logic. These demonstrations show how combining a directional, elastic network with a responsive, swellable network allows a single, soft material to both sense its environment and convert that information into complex actions.
Why This Matters for Future Soft Machines
For non-specialists, the key outcome is that this work merges two kinds of motion—shape change and self-propulsion—into one robust, reusable material. BALCEH bends and twists when it encounters water, humidity, heat, or certain solvents, and it can also glide across water surfaces fueled only by small amounts of organic liquids. Because its response depends on both the surrounding fluid and its own pre-set alignment, it can be programmed to follow specific paths, carry loads, trigger reactions, or separate mixtures without electronics or rigid parts. This coupling of deformation and locomotion in a single, lightweight strip points toward soft robotic devices and coatings that operate autonomously in real-world, wet environments.
Citation: Giri, P., Borbora, A., Sarkar, D. et al. Coupling programmable shape morphing and solvent-fueled propulsion in a soft bicontinuous composite. Nat Commun 17, 3638 (2026). https://doi.org/10.1038/s41467-026-69432-x
Keywords: soft robotics, smart materials, hydrogel composites, self-propulsion, adaptive wettability