Clear Sky Science · ja
ソフトな二連続複合材料におけるプログラム可能な形状変化と溶媒駆動の推進の結合
自律的に動き形を変えるソフトマテリアル
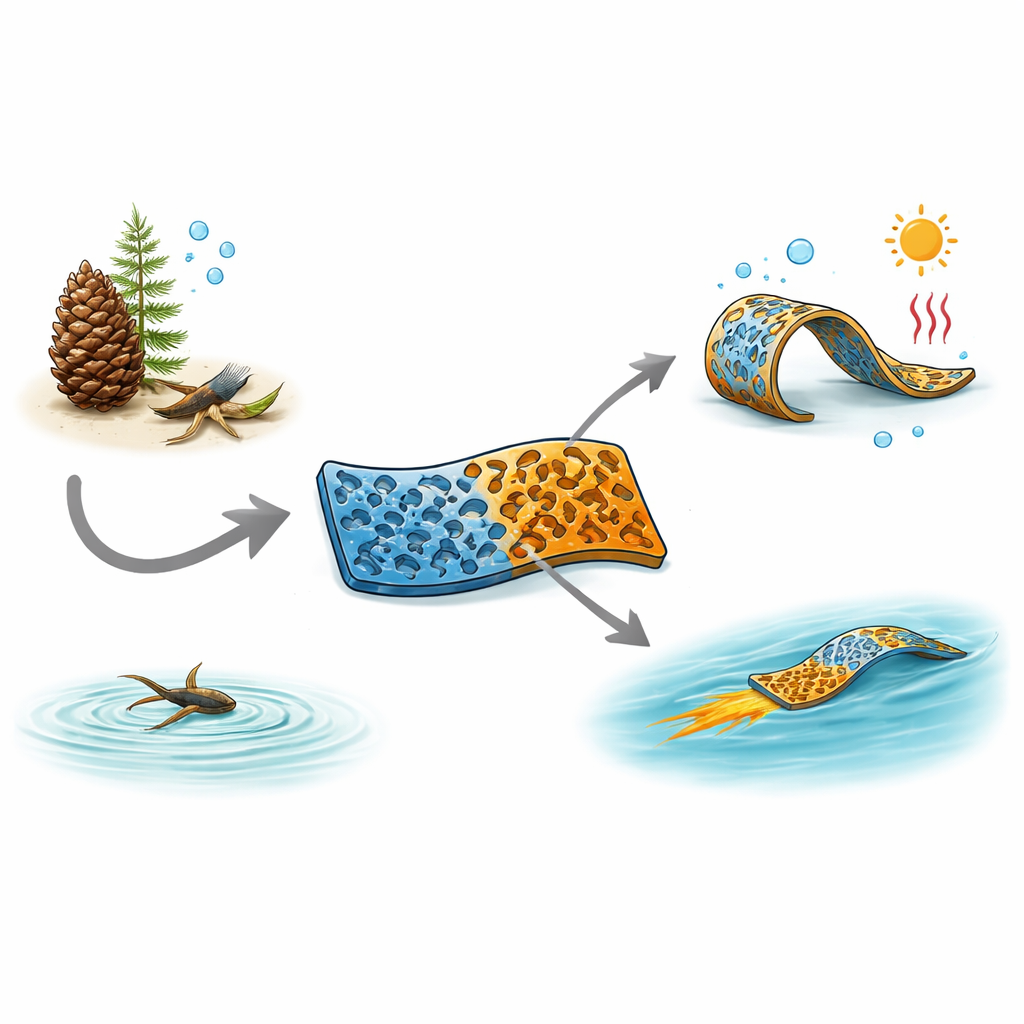
雨の日の松ぼっくりのように縮んだり開いたりし、わずかな液体燃料だけで水面を滑る甲虫のように進む浮遊するゴム状の帯を想像してみてください。本研究はまさにそのようなスマートで柔軟な材料を提示します。これは配線やモーター、電子機器を用いずに形状を再構成しながら水面上を自走でき、将来のソフトロボットやコーティング、小型の化学デバイスが環境に知的に応答する可能性を示唆します。
松ぼっくりと水面を歩く甲虫から学ぶ
自然界では、系はしばしば二つの非常に異なる運動様式を使います。松ぼっくりやセンシティブプラントのように湿度や触覚、温度の変化でその場で形を変えるものがある一方で、特定の甲虫や細菌のように、水面活性物質を放出して水面上を引き寄せられるように移動するものもあります。技術者はそれぞれの振る舞いの側面を合成材料で再現してきましたが、両方を一つのプラットフォームで同時に実現することは稀です。一般的な液晶エラストマーは熱や光で曲がったり収縮したりしますが、水との相互作用や推進を生み出す能力には乏しい。一方ハイドロゲルは水を好み強く膨潤しますが、通常は全方向に膨張してしまい、運動を導くための内在的な方向性や正味の力を生むことが難しいのです。
二重ネットワークのソフト複合材の構築
このギャップを埋めるために、研究者らはBALCEH(二連続液晶エラストマー–ハイドロゲル複合材の略)と呼ぶハイブリッド材料を設計しました。BALCEHは水を好むハイドロゲルと水をはじく液晶エラストマーの、二つの連続しつつ相互に入り組んだネットワークをブレンドしています。ハイドロゲルは多様な液体を吸収する多孔性の足場を形成し、エラストマーは慎重に引き伸ばして所望の単一方向に固定されることで内部構成要素がそろって並びます。この組合せ構造により、一つの材料で強い膨潤性と方向性を持つ弾性が共存します。顕微鏡、赤外線、ラマン散乱、X線散乱を用いた計測から、両ネットワークが十分に相互浸透していること、液晶セグメントが良く整列していること、そして複合材が整列方向に沿ってより強く、同時に靭性と柔軟性を持つことが確認されます。
可変表面と可逆的な形状変化
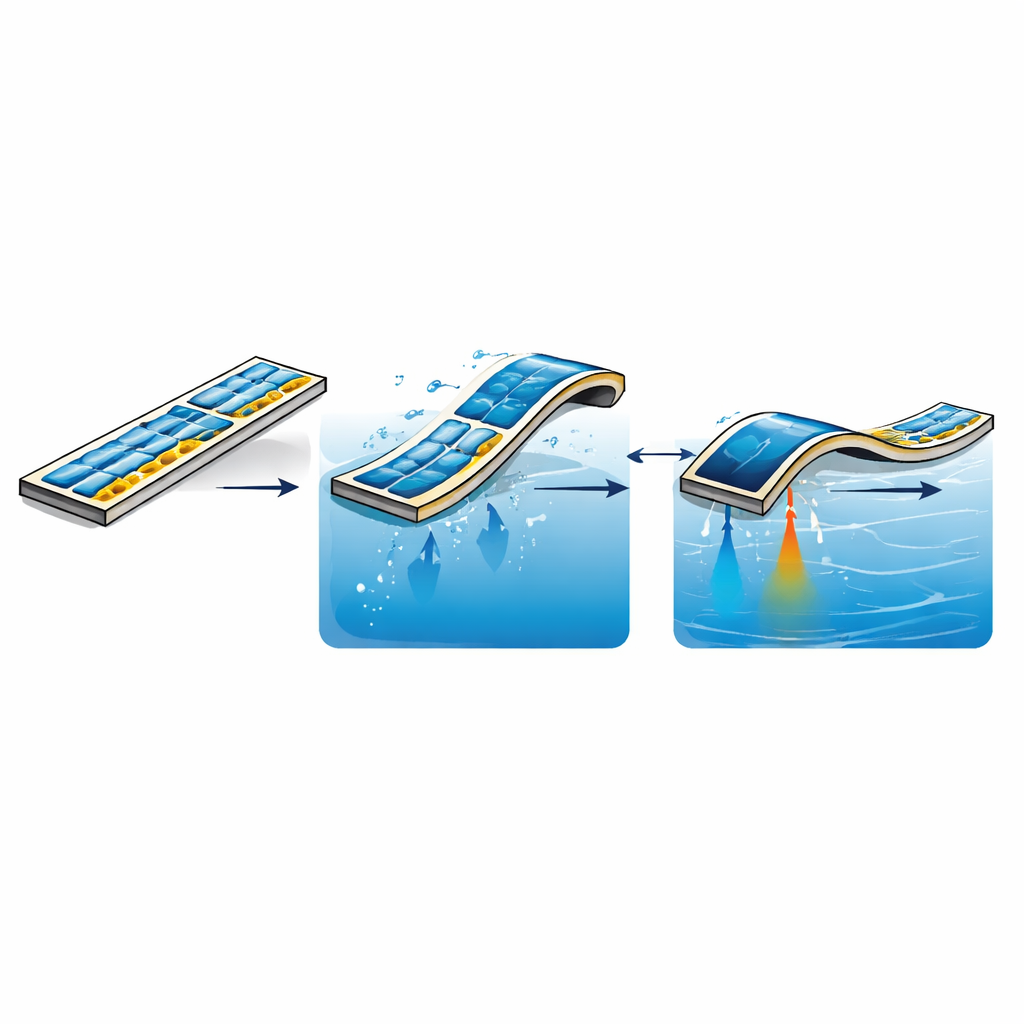
入り組んだネットワークはBALCEHに環境に応じた“カメレオン”的な振る舞いを与えます。ハイドロゲルは水を好み、エラストマーは油を好むため、外界に提示する表面は周囲の液体次第で切り替わります。水中ではハイドロゲルが優勢になり油滴を強く弾き、油中ではエラストマーが表面特性を支配して水をはじきます。この適応的な濡れ性は、適切な環境で油または水のどちらかを極端に拒絶する能力を持ち、スマートフィルターや防汚コーティングに有用です。同時に、二つのネットワークは内部で互いに引っ張り合います。BALCEHが水や他の極性溶媒を吸収すると、ハイドロゲルは特に整列エラストマーに直交する方向に膨張しようとし、エラストマーはそれに抵抗して弾性エネルギーを蓄えます。その結果、制御された曲げや伸び戻しが多数のサイクルで再現されます:ストリップは液体中で展開し乾燥で再び巻き戻り、湿度でねじれ、温度変化で短くなったり伸びたりし、いずれも事前にプログラムされた形状を失いません。
溶媒駆動の滑走とプログラム可能な軌道
その場で曲がるだけでなく、BALCEHは小さなエンジンとしても機能します。エタノールのような低表面張力の溶媒で飽和させ、空気–水界面に置くと、BALCEHのストリップは浮遊してゆっくりと溶媒を周囲の水へ漏出します。異方的な内部構造のため、この放出は不均一になり、表面張力の不均衡が生じてストリップを引き動かします—これがマランゴニ推進として知られる効果です。単純なハイドロゲルは水を取り込むとすぐ沈みますが、複合材の疎水性成分が浮力を保ち、数十分にわたる運動を可能にします。“燃料”となる溶媒の種類、その揮発性、水との混和性を変えることで、チームはストリップの移動時間と強度を調整できます。1個または複数のBALCEH片を簡単な3D印刷形状に取り付ければ、幾何学、燃料の選択、さらにはプールへの他液体の時間差添加により、円形、直進、回転、外向きのらせんなど様々な軌跡をプログラムしたソフトスイマーを作れます。
浮遊ロボットからスマート分離・化学応用へ
同じ基礎原理は他の機能も可能にします。著者らはBALCEHコーティングを施した繊維が重力だけで油と水を選別できることを示しています。複合材の各面が一方の液体を選択的に通しもう一方を遮断するためです。別の例では、星形のBALCEHアクチュエータが固体反応物ビーズを層状の油–水系を通して運び、水がトリガーとなって材料が展開する場所でのみ放出して化学反応を開始させます。これらの実演は、方向性を持つ弾性ネットワークと応答性のある膨潤ネットワークを組み合わせることで、単一のソフト材が環境を感知し、その情報を複雑な動作へと変換できることを示しています。
未来のソフトマシンにとっての意義
非専門家向けに言えば、本研究の重要な成果は二種類の運動—形状変化と自己推進—を一つの堅牢で再利用可能な材料に統合した点です。BALCEHは水、湿度、熱、特定の溶媒に出会うと曲がったりねじれたりし、わずかな有機液体だけで水面を滑走することもできます。反応は周囲の流体とあらかじめ設定された配列の両方に依存するため、特定の経路をたどらせたり、荷物を運んだり、反応を引き起こしたり、混合物を分離したりといった動作を電子機器や剛性部品なしでプログラムできます。変形と移動を一枚の軽量ストリップに結合したことは、実世界の湿潤環境で自律的に動作するソフトロボット装置やコーティングへの道を開きます。
引用: Giri, P., Borbora, A., Sarkar, D. et al. Coupling programmable shape morphing and solvent-fueled propulsion in a soft bicontinuous composite. Nat Commun 17, 3638 (2026). https://doi.org/10.1038/s41467-026-69432-x
キーワード: ソフトロボティクス, スマート材料, ハイドロゲル複合材, 自己推進, 適応性のある濡れ性