Clear Sky Science · zh
从侧向自我视角记忆更新一个外心目标
小脑如何解决大规模导航问题
蚂蚁常常穿越无特征的沙漠和繁茂的森林,在离开食物来源后又异常精准地返回巢穴。本研究探讨了这样体积微小的大脑如何完成一项至今仍让无GPS的机器人头疼的任务:将动物从自身视角看到的景象,与与外部世界相连的稳定方向感结合起来。通过揭示蚂蚁如何将零碎的景观快照转化为可靠的内部航向,这项工作阐明了导航的一般性原理,可能适用于超越昆虫的更广泛对象,从其他动物到自主机器。
侧视寻找方向
多年来,研究者普遍认为导航昆虫在离开巢穴或觅食点时记忆正前方的视景,之后识别出相同的视景便知道“家在前方”。但对两种非常不同的蚂蚁物种的野外实验证明了一个令人惊讶的反转:蚂蚁依赖的是在向侧面张望时形成的记忆,而不是直视目标时的记忆。研究者在蚂蚁的自然栖息地使用滚动球装置,把归巢的蚂蚁固定在不同的体轴朝向,测量它们尝试转向的方向。无论身体如何转动,只要周围场景是熟悉的,蚂蚁就会转向正确的路线方向。即便它们正好面向家或背对家,它们的行为也更像是在选择“左”或“右”,而不是“直行”。这表明识别熟悉的视景告诉蚂蚁路线是在左侧还是右侧,而不是简单地表明目标就在正前方。 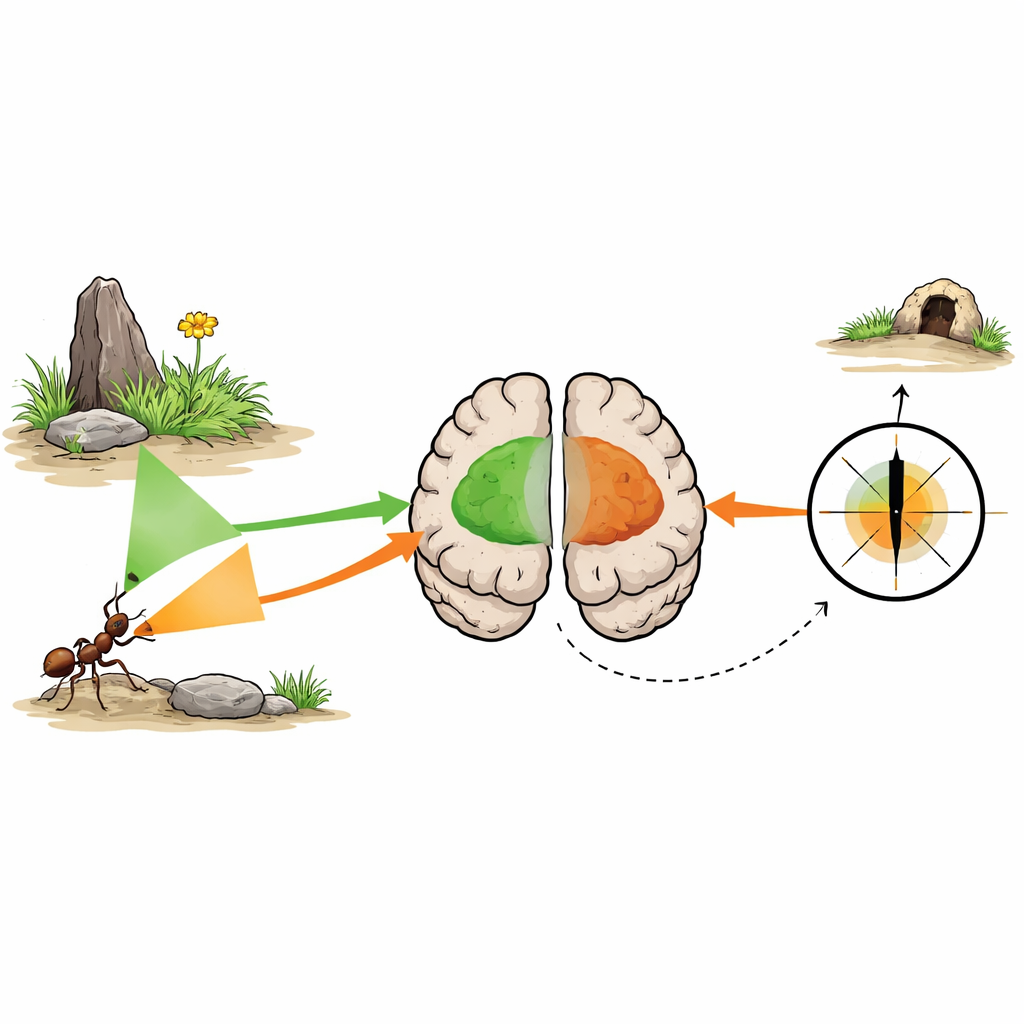
将地标与太阳罗盘混合
下一个问题是这些左右信号如何用于控制转向。一种可能是识别到熟悉的侧向视景就直接触发腿部向该方向转动。另一种则是两阶段过程:视觉记忆首先更新一个内部的期望航向,然后将其与来自太阳和其他天穹线索的信息比较以产生转向。为区分这两种可能性,研究者在蚂蚁站在熟悉环境的滚动球上时,将太阳的表观位置用镜子翻转了180度。当太阳被翻转时,蚂蚁的首选转向方向立即反向,但仅在地面场景熟悉时才会如此。这表明侧向视觉记忆并不直接驱动转向;相反,它们设定了一个被中央“罗盘”系统读取的期望方向,而该系统再控制蚂蚁的运动。
整合左右线索的大脑枢纽
研究团队随后基于已知的昆虫大脑连线构建了计算模型。在蚂蚁中,长期视觉记忆被认为储存在称为蘑菇体的结构内,而中央复合体(central complex)这一中枢脑区则保存着内部罗盘和当前目标方向的表征。模型假设当蚂蚁相对于真实目标略向一侧朝向时,该侧大脑半球接收更强的信号。这些左右不均的输入更新中央复合体中存储的目标方向,然后将其与当前的罗盘航向比较以生成左或右的转向。由于真实的视觉识别含有噪声且仅在某些注视角度下有效,输入被设为间歇且不精确。然而,只要左右线索大致对应“目标在你左侧”和“目标在你右侧”,模拟体仍能产生稳定且笔直的路线。如果这些关联被颠倒,模型就会可靠地沿错误方向行进,正如太阳翻转实验所预测的那样。
当天空欺骗你时,地面把你拉回正轨
为进一步测试模型,研究者模拟了当内部罗盘在蚂蚁沿熟悉路线行进时突然被置换会发生什么。他们将这与真实蚂蚁的实验进行了对比,真实蚂蚁通过镜子把太阳的视角旋转了135度。在模拟和野外实验中,蚂蚁都会短暂偏离,然后弯回朝向正确路径,并在短暂彷徨后再次走直。在模型中,这种行为产生于中央复合体中存储的旧目标方向与与被置换罗盘相关的更新目标短暂重叠,形成一次拉锯,这将在旧记忆痕迹衰减后得到解决。模型与行为之间的这种密切匹配强化了这样一种观点:导航是噪声地标识别与更稳定的基于罗盘的航向之间持续对话的结果。 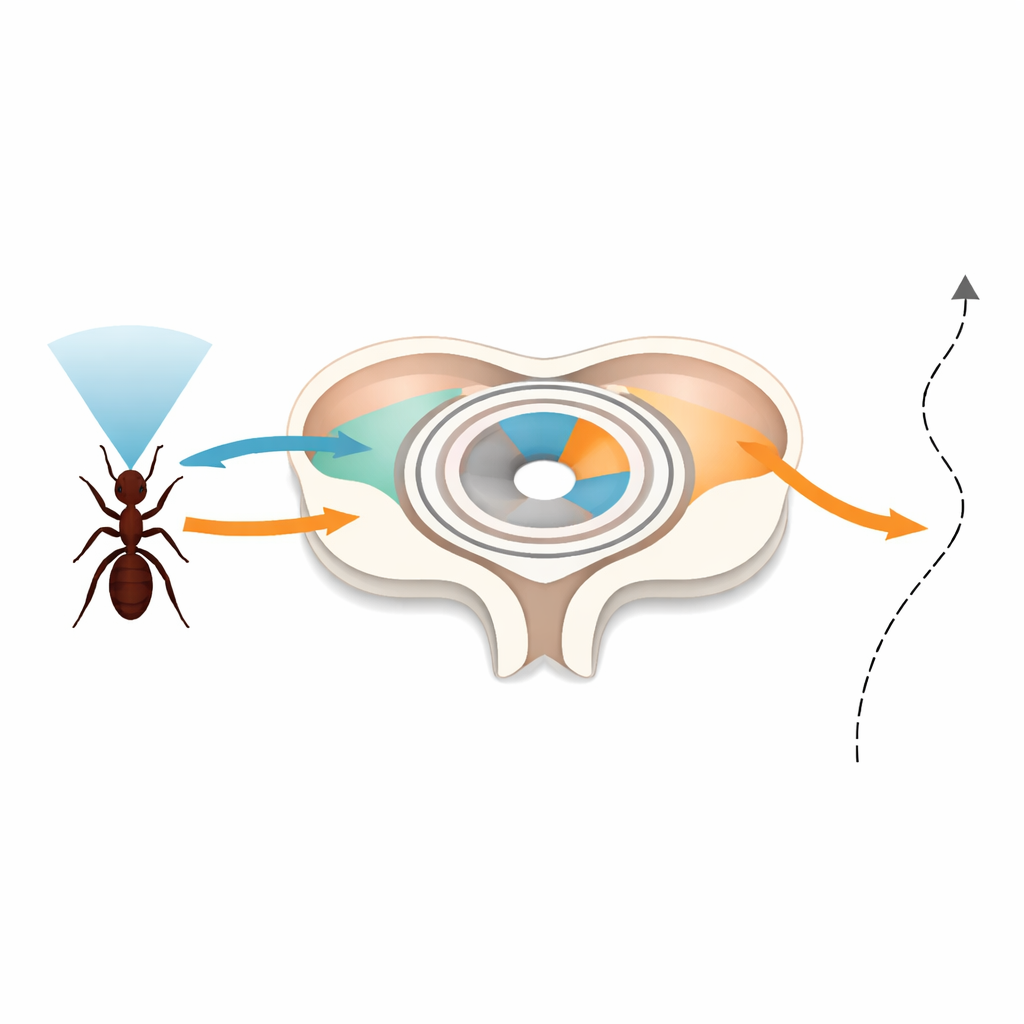
从蚂蚁小径到一般性导航原理
简而言之,这项研究表明蚂蚁并不是通过匹配一个完美的、心理上的正前方照片来转向。相反,它们比较当自身略偏左或偏右时世界看起来有多熟悉,将这些信号送入一个中央引导枢纽,并让基于天穹的罗盘平滑掉噪声。这种侧向的两阶段设计出现在远缘关系的蚂蚁物种中,并呼应了更广泛的观点:许多动物(包括人类)将视角绑定的地图与以世界为中心的空间地图结合使用。通过揭示紧凑大脑如何把侧向快照转化为稳健的“去向感”,这项工作为在人工智能体中构建更有能力、更高效的导航系统提供了蓝图。
引用: Wystrach, A., Le Moël, F., Clement, L. et al. Updating an allocentric goal from lateralised egocentric visual memories. Nat Commun 17, 3594 (2026). https://doi.org/10.1038/s41467-025-67545-3
关键词: 蚂蚁导航, 空间记忆, 视觉地标, 神经回路, 太阳罗盘