Clear Sky Science · ja
側方に偏った自己中心的視覚記憶から割心的な目標を更新する
小さな脳が大きなナビゲーション問題を解く方法
アリは特徴のない砂漠や雑然とした森を日常的に横切り、餌を置いてから驚くほど正確に巣へ戻ります。本研究は、自己の視点から得られる視覚情報と外界に固定された方位感覚とを結び付けるという、我々のGPSを使わないロボットでも難しい課題を小さな脳がどうやって達成しているかを問います。風景の断片的なスナップショットを信頼できる内部の方位へ変換する仕組みを明らかにすることで、この研究は昆虫に留まらない一般的なナビゲーション原理──他の動物や自律機械にも当てはまる可能性のある原理──に光を当てます。
道を見つけるために横を向く
長年、研究者たちは、巣や餌場を離れるときに昆虫はまっすぐ前方の風景を記憶し、後で同じ景色を認識して「巣は前方にある」と分かると考えてきました。しかし、異なる二種のアリを用いた野外実験は驚きのひねりを示しました。アリは目標を真っ直ぐ見ているときではなく、側方を見ているときに形成した記憶に依存しているのです。研究者らは野外でのトラックボール装置を使い、帰巣するアリをさまざまな体の向きで固定してどちらに回転しようとするかを測定しました。体がどのように回転されても、周囲の光景が馴染みのあるものであれば、アリは正しいルート方向の方へ向かって回転しようとしました。たとえ巣の方向にまさに向かっているときやちょうど背を向けているときでも、彼らの行動は「真っ直ぐ進め」ではなく「左」か「右」を選ぶように最もよく表現されました。これは、馴染みのある視景を認識することが、目標が真っ直ぐ前にあると知らせるのではなく、ルートが自分の左か右かを示す、ということを意味します。 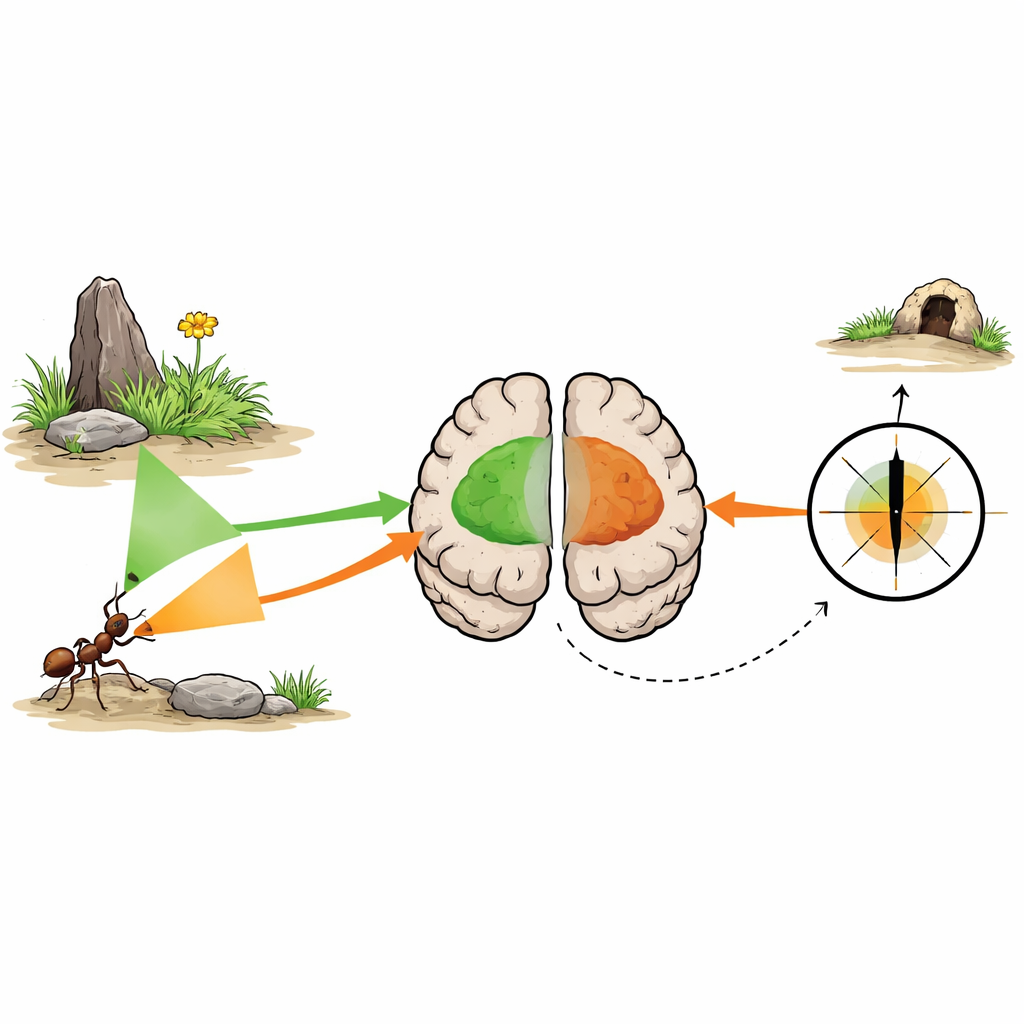
ランドマークと太陽コンパスの混合
次の疑問は、これらの左右の信号がどのように舵取りに使われるかでした。一つの可能性は、馴染みのある側方の視景を認識することで直接脚の動きがその方向に駆動されるというものです。もう一つは二段階のプロセスで、視覚記憶がまず内部の望ましい方位を更新し、それが太陽や他の天の手がかりからの情報と比較されて操舵が生じる、という考え方です。これらを区別するために、研究者らはトラックボール上のアリが立っている間に鏡で見かけ上の太陽の位置を180度反転させました。太陽が反転されると、アリは直ちに好む回転方向を逆転させましたが、それは地面の景色が馴染みのある場合に限られました。これは、側方の視覚記憶が直接的に回転を駆動しているのではなく、むしろ望ましい方向を設定し、それが中央の「コンパス」システムによって読み取られ、そこから運動が制御されることを示しています。
左右の手がかりを統合する脳のハブ
研究チームは次に、既知の昆虫脳配線に基づくコンピュータモデルに取り組みました。アリでは長期的な視覚記憶はキノコ体と呼ばれる構造に保存されると考えられ、一方で中央複合体(セントラルコンプレックス)として知られる脳領域は内部コンパスと現在の目標方向の表象を保持します。モデルは、各脳半球がアリが真の目標からやや外れた側方を向いたときにより強い信号を受け取ると仮定します。こうした左右の不均等な入力が中央複合体に格納された目標方向を更新し、それが現行のコンパス方位と比較されて左右の回転を生成します。実際の視覚認識は雑音を含み、特定の視線角度でしか機能しないため、モデルへの入力は断続的で不正確に設定されました。それでもシミュレーションされたエージェントは、左右の手がかりが大まかに「目標は左にある」「目標は右にある」と一致している限り、安定した真っ直ぐなルートを生成しました。これらの対応関係が逆転すると、モデルは太陽反転実験から予測されるように確実に誤った方向にルートをたどりました。
空が欺くとき、地面が道を戻す
モデルをさらに検証するために、研究者らは内部コンパスが突然シフトしたときにアリが馴染みのルートを歩いていると何が起きるかをシミュレートしました。これを、鏡で太陽の見え方を135度回転させた実際のアリと比較しました。シミュレーションでも野外でも、アリは一瞬逸れてから正しい経路へ曲がり戻し、短いさまよいの後に再び真っ直ぐ歩きました。モデルでは、この行動は中央複合体に格納された古い目標方向が、シフトしたコンパスに結び付けられた更新された目標と一時的に重なるために生じる綱引きとして説明され、古い記憶痕跡が消えると解決します。モデルと行動のこの密接な一致は、ナビゲーションが雑音のあるランドマーク認識とより安定したコンパスに基づく方位との継続的な対話から生じるという考えを強化します。 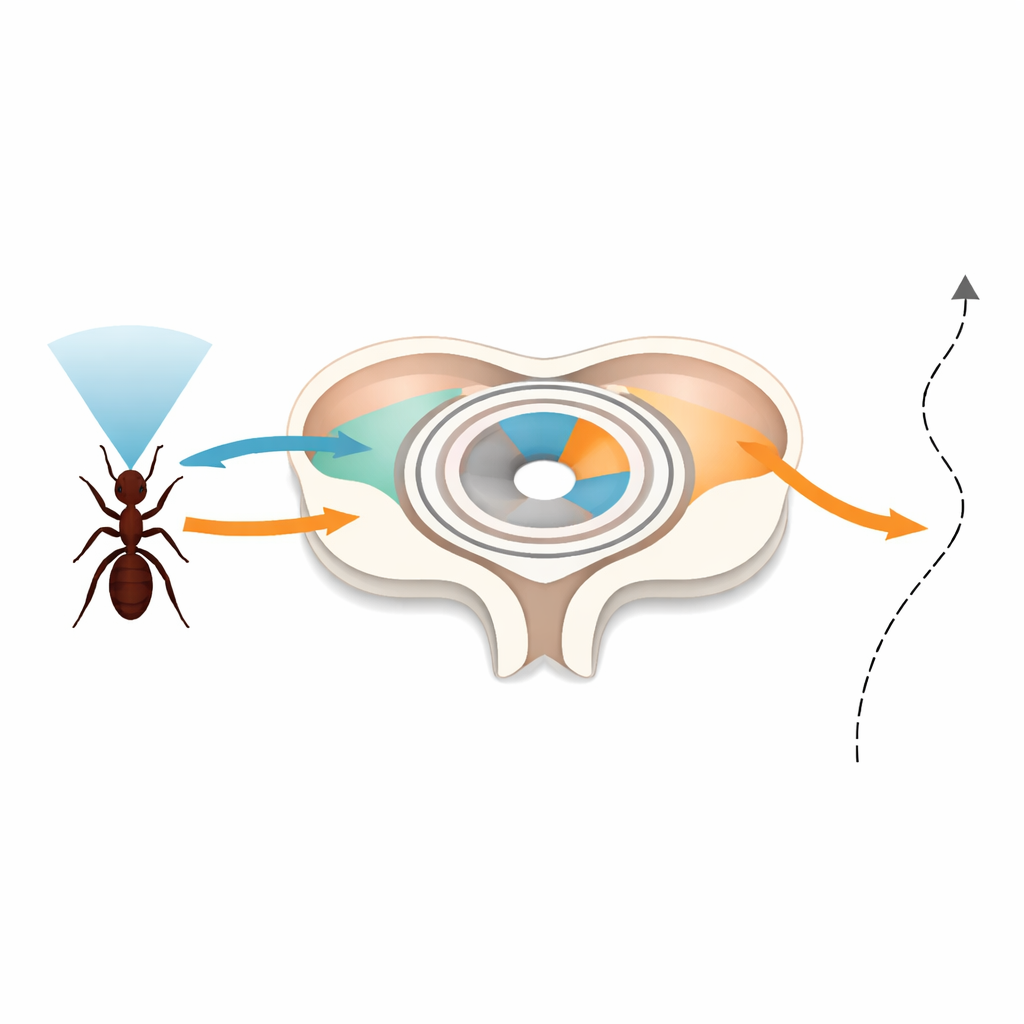
アリの道筋から一般的なナビゲーション原理へ
簡潔に言えば、本研究はアリが目の前の風景の完全な心的写真と照合して舵を取っているのではないことを示します。代わりに、理想的な方向からわずかに左や右にいるときに世界がどれだけ馴染んで見えるかを比較し、そうした信号を中央のガイダンスハブに送り、天に基づくコンパスが雑音を平滑化します。この側方的で二段階の設計は系統的に離れたアリ種にも現れ、人間を含む多くの動物が視点に結び付いた地図と世界中心の地図を組み合わせるという広い考え方と共鳴します。小さな脳が側方を向いたスナップショットから「どこへ行くか」の堅牢な感覚を構築する様子を明らかにすることで、この研究は人工エージェントにより能力の高い効率的なナビゲーションシステムを構築するための設計図を提供します。
引用: Wystrach, A., Le Moël, F., Clement, L. et al. Updating an allocentric goal from lateralised egocentric visual memories. Nat Commun 17, 3594 (2026). https://doi.org/10.1038/s41467-025-67545-3
キーワード: アリのナビゲーション, 空間記憶, 視覚的ランドマーク, 神経回路, 太陽コンパス