Clear Sky Science · zh
基于图论计算模型的大动态范围 Shack–Hartmann 波前传感
更清晰地观测扭曲光场
当今许多最先进的光学系统——从巨型望远镜到高精度眼部成像仪——都依赖于一类能够“感知”光波微小波动的传感器。但当这些波面严重扭曲时,传统工具会失效并产生错误。本文提出了一种新的软件驱动方法来挽救这些测量,使现有硬件能够穿透比以往更强的畸变。
一片微小透镜阵列如何读取波面
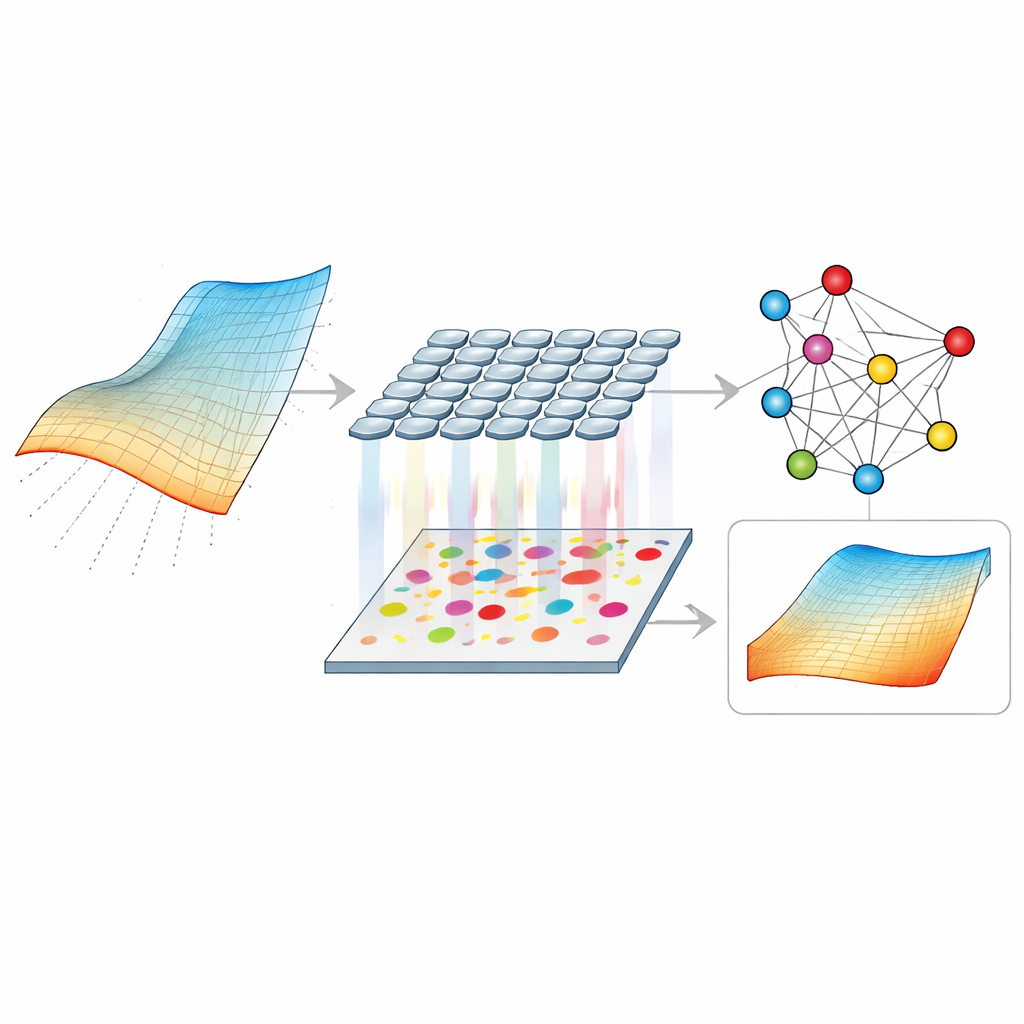
Shack–Hartmann 波前传感器有点像在相机前放置的昆虫复眼。一阵列微小透镜把入射光波分成许多小束,每束在探测器上形成一个亮点。如果波面平缓,每个亮点都保持在其分配的格子内,其位置偏移表明该处波面的局部“倾斜”。通过组合成千上万个这样的局部倾斜,我们可以重建光波的完整三维形状——这是锐化望远镜图像、校正显微镜畸变和稳定激光束的关键。
当光线变得过于紊乱
问题出现在波面非常陡峭或严重畸变的情况,例如强大气湍流、高功率激光或严重畸变的眼球。在这些情况下,许多亮点会远离原来格子并与邻近亮点重叠,其形状也会拉伸和扭曲。传统方法假设每个亮点都停留在自己的格子内并可由单一中心点概括。在强畸变下,这一假设会崩溃:亮点被错误分配到其他透镜、测得的中心变得不可靠,传感器的可用“动态范围”随之坍缩。硬件修正——例如改变透镜设计或添加掩码——可以有所帮助,但常常以牺牲灵敏度、速度或成本为代价,并且收益有限。
把混乱的亮点变成图论问题
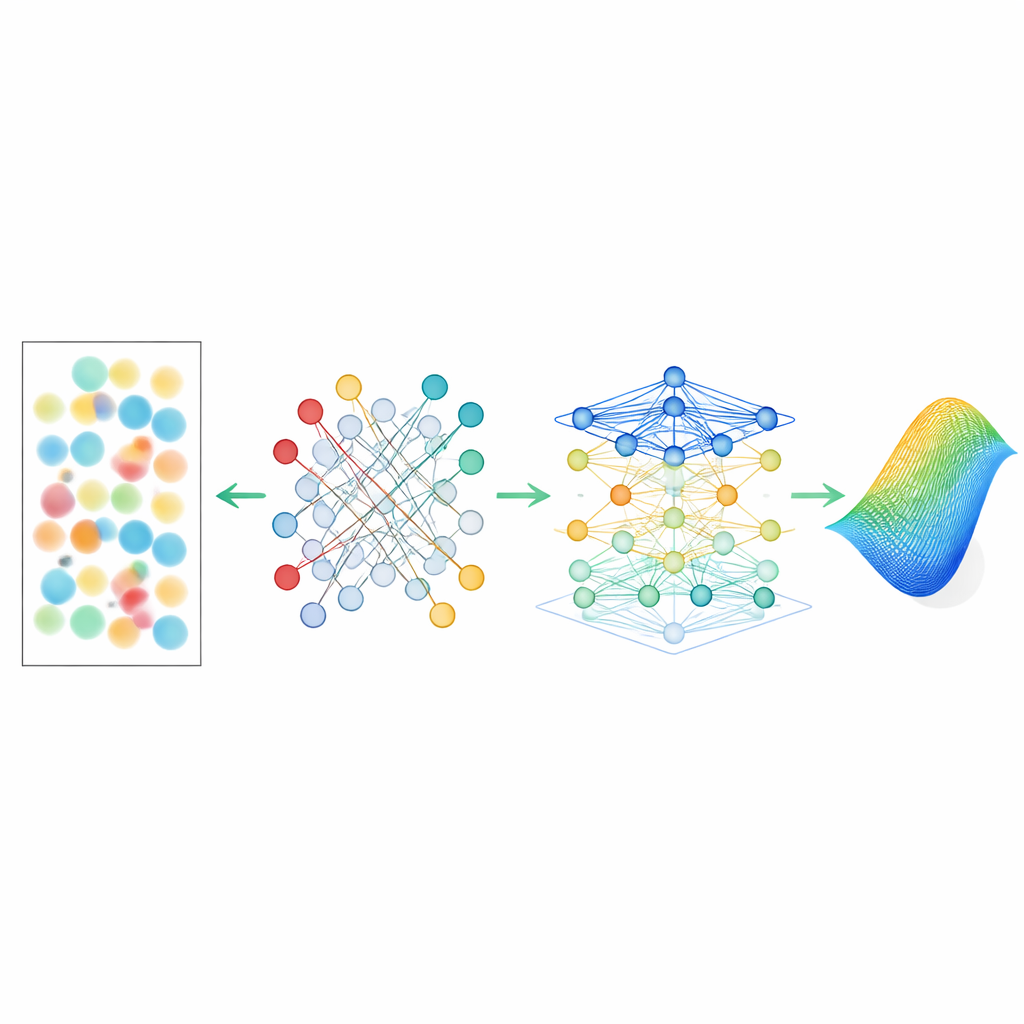
作者提出了 G‑SHWS,一种将错乱亮点模式视为图上的匹配难题的新计算框架。首先,他们根据一组 Zernike 系数(编码常见畸变形状的标准方式)生成来自试探波面的预测亮点模式。测得的亮点和预测亮点被视为加权二分图中两组节点,每一种可能配对都基于距离赋予一个代价。一个专门的优化例程在波面参数空间中搜索,寻找使总配对代价最低的配置。随着迭代进行,预测亮点渐渐变形,直到其模式与测得模式高度一致,此时就可以可靠地恢复“哪个亮点来自哪个透镜”的正确对应关系——即便亮点已跨越格子边界、互相重叠或部分缺失。
让网络从亮点形状中学习
恢复正确配对仅解决了问题的一半:畸变亮点在其形状中包含丰富信息,而不仅仅是中心位置。为此,G‑SHWS 构建了一个图注意力网络——一种天然在节点与边上运行的机器学习模型。每个亮点成为由其位置和详细形状描述符共同表征的节点,每个透镜位置也是一个节点。边编码亮点属于哪个透镜以及透镜在网格上的邻接关系。注意力机制学习每个亮点应如何“倾听”其邻居,给予那些具有相似畸变模式的节点更高权重。通过这种结构化的关系与形状网络,模型直接推断出潜在的波面参数,绕过了限制传统方法的粗糙单中心近似。
推进极限并保持测量鲁棒性
在仿真中,新方法将典型传感器的可用亮点位移扩展到几何极限的 21 倍,同时仍将重建误差保持在约波长的二十分之一以下——足以满足高要求的光学工作。它在多种畸变类型上都取得成功,从简单的球面和散光模式到复杂混合以及具有非常陡峭局部坡度的合成大气湍流。关键是该方法在许多亮点因遮挡丢失时也保持可靠:通过在匹配过程中引入高惩罚的“虚拟”节点并在重建阶段用代理亮点填补缺失区域,图模型能够容忍大量连续或散乱的数据丢失而不崩溃。
这对未来光学系统意味着什么
对非专业读者而言,核心信息是作者找到了一种将本来脆弱的光学器件转变为更坚韧的软件增强仪器的方法。通过将问题重新表述为图上的全局模式匹配,并同时从亮点的位置和外观中学习,G‑SHWS 使现有 Shack–Hartmann 传感器在无需任何硬件更改的情况下测量远比其设计目标更强的畸变成为可能。这为透过湍流获得更清晰的天文图像、在恶劣环境中进行更精确的测量以及更好地校正人眼复杂视力缺陷打开了大门——这一切都通过教传感器更聪明地解读其本身混乱的数据实现。
引用: Du, L., Xu, R., Liu, S. et al. Large dynamic range Shack-Hartmann wavefront sensing based on a graph-theoretic computational model. Light Sci Appl 15, 199 (2026). https://doi.org/10.1038/s41377-026-02273-x
关键词: 波前传感, 自适应光学, 图神经网络, Shack–Hartmann 传感器, 光学像差