Clear Sky Science · tr
Çok açılı ve karmaşık arka plan senaryolarında cıvata ve cıvata-eksik hatalarının görüntü tabanlı tespiti
Neden küçük bağlantı elemanlarını kontrol etmek önemli
Köprülerin, kulelerin ve diğer çelik yapıların içinde her şeyi sessizce bir arada tutan yüz binlerce cıvata vardır. Bu bağlantı elemanlarının çok sayıda gevşemesi veya kaybolması, bütün yapının dayanımını azaltabilir ve bazen tehlikeli sonuçlara yol açabilir. Bunları tek tek elle denetlemek yavaş, maliyetli ve özellikle işçiler yüksek yerlere tırmanmak veya dar alanlara girmek zorunda kaldığında hata yapmaya açık bir iştir. Bu çalışma, akıllı kameralar ve yapay zekânın gerçek dünya koşullarında eksik cıvataları otomatik olarak tespit ederek güvenlik kontrollerini daha hızlı, daha güvenli ve daha güvenilir hâle nasıl getirebileceğini araştırıyor.
Gerçek köprülerden zengin bir fotoğraf kütüphanesine
Bir bilgisayarı eksik cıvatayı tanımayı öğretmek için araştırmacıların önce büyük ve çeşitli bir görüntü koleksiyonuna ihtiyaçları vardı. Fotoğrafları üç ana kaynaktan topladılar: hizmette olan tam ölçekli bir asma köprü, sahadaki çelik enerji iletim kuleleri ve laboratuvarda özel olarak inşa edilmiş, cıvatalarla kaplı bir çelik levha. Birlikte bunlar, cıvataları birçok açıda, güneşli ve gölgeli koşullarda, pas, lekeler ve farklı renk kaplamalarla gösteren 5.000’den fazla görüntü sağladı. Bu kütüphaneyi daha da genişletmek için ekip, bulanıklaştırma ve gürültü ekleme ya da renk değişiklikleri gibi klasik görüntü dönüşümlerini kullandı ve ayrıca ana nesne—cıvata—doğruluğunu korurken arka planı ve çevreyi çeşitlendiren gerçekçi yeni sahneler oluşturan bir tür “hayal motoru” olan üretici karşıt ağlar (GAN) kullandı. 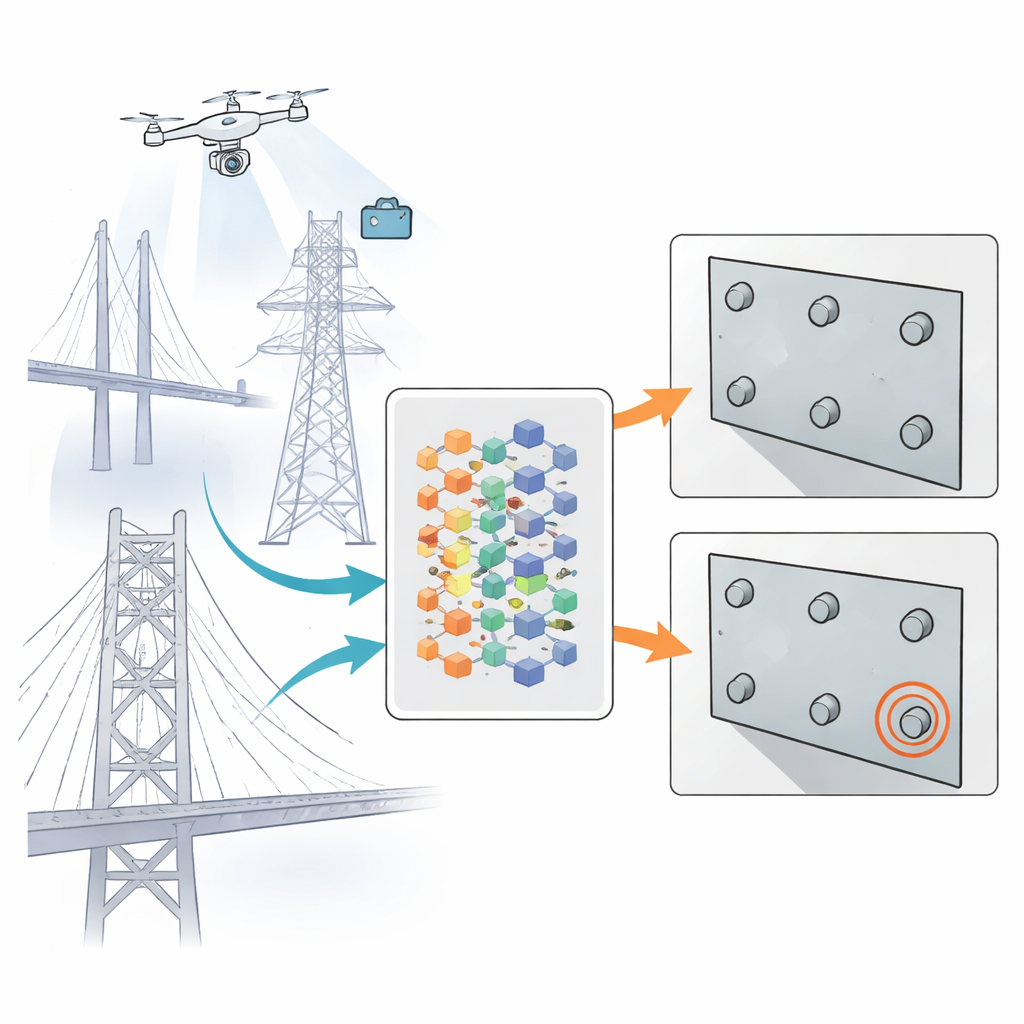
Popüler yapay zekâ modellerini teste sokmak
Bu zengin görüntü kütüphanesiyle ekip, resimlerde nesne tespiti için yaygın olarak kullanılan üç önde gelen bilgisayarlı görü sistemini karşılaştırdı: YOLO (You Only Look Once) ailesinin üç versiyonu. Bu sistemler bir görüntüyü tek geçişte tarar ve nesnelerin bulunduğunu düşündükleri kutuları önerir. Araştırmacılar her bir versiyonun cıvataları ne sıklıkla doğru tespit ettiğini ve bir cıvatanın eksik olduğu boş delikleri ne kadar doğru işaretlediğini ölçtüler. Üç model de oldukça iyi performans gösterdi, ancak bir versiyon—YOLOv8—doğruluk ile hız arasında denge kurarak öne çıktı. Rakiplerinden çok daha hızlı işlem yaparken cıvataları ve eksik cıvataları güvenilir şekilde tanımladı ve bu da onu daha fazla geliştirme için güçlü bir başlangıç noktası yaptı.
Bilgisayara karmaşanın içinden görmeyi öğretmek
Gerçek çelik yapılar nadiren temiz, doğrudan çekilmiş görüntülerle fotoğraflanır. Cıvatalar garip açılardan, gölgeler içinde veya çimen, beton ve boyalı çelik gibi yoğun arka planlar önünde görülür. Buna uyum sağlamak için araştırmacılar YOLOv8 modelini iki önemli eklemeyle yükseltti. İlk olarak, sistemin yalnızca küçük parçalara odaklanmak yerine görüntünün uzak bölgeleri arasındaki ilişkileri fark etmesine yardımcı olan modern bir görüntü-analiz bloğu olan Swin-Transformer’ı entegre ettiler. İkinci olarak, farklı ölçeklerde ince kenar ve küçük şekillere özel dikkat gösteren çok ölçekli ve detay-iyileştirici bir modül eklediler. Bu yükseltmeler bir arada çalışarak, modelin küçük koyu bir dairenin gerçekten bir cıvata başı mı, boş bir delik mi yoksa sadece arka plandaki kafa karıştırıcı bir leke mi olduğunu söylemede çok daha iyi olmasını sağladı. 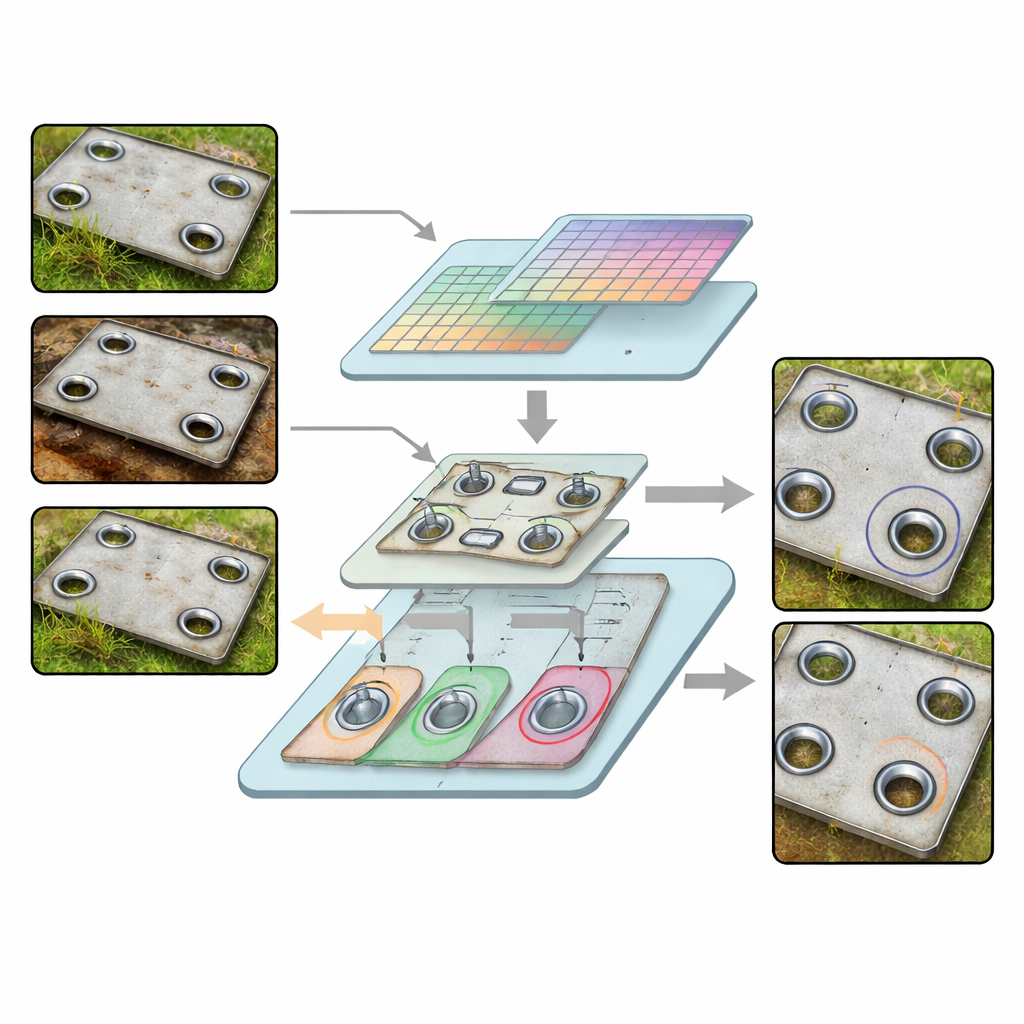
Zorlu koşullarda performansı kanıtlamak
Geliştirilmiş sistem daha sonra bir dizi stres testinden geçirildi. Sığ ve dik açılardan görülen cıvataların, loş, normal ve bıçak gibi parlak ışık altında ve kırmızı, beyaz veya mavi boyanmış çelik levhalar üzerinde ve dağınık çimenli çevreler önünde çekilmiş görüntülerini analiz etti. Bu durumların çoğunda model neredeyse her seferinde cıvatanın durumunu doğru şekilde değerlendirdi; en uç kamera açıları ve en parlak ışık koşullarında bile doğruluk yaklaşık olarak %90’ın üzerinde kaldı. Son olarak, araştırmacılar 15 yıllık bir asma köprünün üzerinde bir drone uçurarak binlerce gerçek denetim görüntüsü yakaladı. Model 12.700’den fazla cıvata setini inceledi, neredeyse tümünü doğru şekilde konumlandırdı ve on binlerce arasından tek bir gerçekten eksik cıvatayı işaretledi—bu, yöntemin laboratuvar dışı koşullarda da işe yarayabileceğinin güçlü bir göstergesi.
Günlük güvenlik için bunun anlamı
Uzman olmayanlar için ana mesaj, büyük çelik yapılarda rutin güvenlik kontrollerinin yakında kirişlerin üzerinde sürünen, kontrol listeleriyle dolaşan insanlara daha az, drone’lara ve akıllı algoritmalara daha çok dayanabilir hale gelebileceği. Özenle oluşturulmuş ve çeşitlendirilmiş bir fotoğraf koleksiyonundan öğrenerek ve dağınıklığın içinden görmeyi sağlayan gelişmiş görüntü işleme teknikleri kullanarak bu çalışmadaki sistem, koşullar hiç de mükemmel olmasa bile bir cıvatanın var olup olmadığını güvenilir şekilde söyleyebiliyor. Kusursuz olmasa da, insan denetçilere yardımcı olacak ve gerçek problemlerin olabileceği birkaç noktaya odaklanmalarını sağlayacak kadar iyi performans gösteriyor; sonuçta daha az kesinti ve daha düşük maliyetle daha güvenli köprüler ve kulelere katkıda bulunuyor.
Atıf: Gu, Y., Peng, D., Song, J. et al. Image-based detection of bolts and bolt-missing defects in multi-angle and complex background scenarios. Sci Rep 16, 11590 (2026). https://doi.org/10.1038/s41598-026-41036-x
Anahtar kelimeler: yapısal sağlık izleme, köprü denetimi, bilgisayarlı görü, derin öğrenme, cıvata kusurları