Clear Sky Science · ar
الكشف عن البراغي وعيوب فقدان البراغي بالصور في سيناريوهات متعددة الزوايا وخلفيات معقدة
لماذا يهم فحص المثبتات الصغيرة
مخبأة داخل الجسور والأبراج والهياكل الفولاذية الأخرى مئات الآلاف من البراغي التي تمسك كل شيء بهدوء. إذا ارتخى عدد كبير من هذه المثبتات أو فقدت، يمكن أن يقلل ذلك من قوة الهيكل بأكمله، وأحيانًا بعواقب خطيرة. فحصها واحدة تلو الأخرى باليد بطيء ومكلف وسهل الخطأ، خاصة عندما يتعين على العاملين التسلق عالياً أو الانزلاق إلى أماكن ضيقة. تستكشف هذه الدراسة كيف يمكن للكاميرات الذكية والذكاء الاصطناعي اكتشاف البراغي المفقودة تلقائياً في ظروف العالم الحقيقي، مما يجعل الفحوصات السلامة أسرع وأكثر أمانًا وموثوقية.
من جسور حقيقية إلى مكتبة صور غنية
لتعليم الحاسوب التعرف على البراغي المفقودة، احتاج الباحثون أولاً إلى مجموعة كبيرة ومتنوعة من الصور. جمعوا صورًا من ثلاثة مصادر رئيسية: جسر معلق بحجمه الطبيعي قيد التشغيل، وأبراج نقل فولاذية في الميدان، ولوحة فولاذية مبنية في المختبر ومثبّتة ببراغي. معًا وفرت هذه المصادر أكثر من 5000 صورة تُظهر البراغي من زوايا عديدة، تحت الشمس والظل، وبوجود صدأ وبقع وطبقات طلاء بألوان مختلفة. ولتوسيع هذه المكتبة أكثر، استخدم الفريق تعديلات صور كلاسيكية، مثل إضافة تمويه وضوضاء أو تغيير الألوان، ولجأ أيضًا إلى نوع من «محرك الخيال» المسمى بشبكة تنافسية مولّدة، التي تبتكر مشاهد جديدة واقعية حيث يظل العنصر الأساسي — البرغي — دقيقًا بينما تتنوع الخلفية والمحيط. 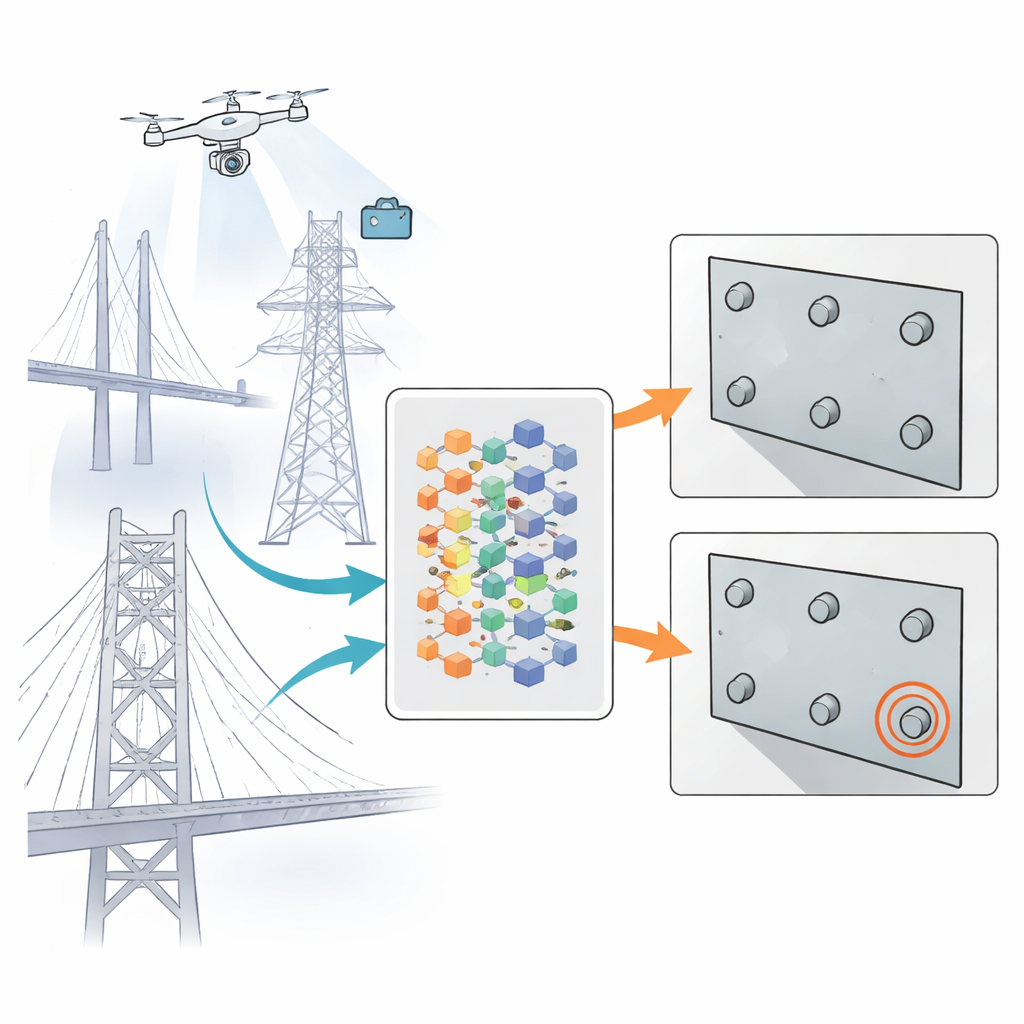
اختبار نماذج الذكاء الاصطناعي الشائعة
بوجود هذه المكتبة الغنية من الصور، قارن الفريق بين ثلاثة أنظمة رائدة في رؤية الحاسوب تُستخدم على نطاق واسع لاكتشاف الأشياء في الصور: ثلاث إصدارات من عائلة YOLO (You Only Look Once). تقوم هذه الأنظمة بمسح الصورة في تمريرة واحدة وتقترح صناديق حيث تعتقد أن الأجسام موجودة. قاس الباحثون مدى تكرار كل إصدار في اكتشاف البراغي بشكل صحيح ووضع علامة صحيحة على الثقوب الفارغة حيث يكون البرغي مفقودًا. جميع النماذج الثلاثة أدت أداءً جيدًا إلى حد ما، لكن إصدارًا واحدًا — YOLOv8 — برز بتوازنه بين الدقة والسرعة. فقد تعرف على البراغي والبراغي المفقودة بشكل موثوق بينما عالج الصور أسرع بكثير من منافسيه، مما يجعله نقطة انطلاق قوية لمزيد من التحسين.
تعليم الحاسوب الرؤية عبر الفوضى
نادراً ما تُصوّر الأعمال الفولاذية الحقيقية بمنظور نظيف ومباشر. تُرى البراغي من زوايا غريبة، من خلال ظلال، أو أمام خلفيات مزدحمة من العشب والخرسانة والفولاذ المطلي. للتعامل مع ذلك، طوّر الباحثون نموذج YOLOv8 بإضافتين أساسيتين. أولاً، أدخلوا كتلة تحليل صور حديثة تُدعى Swin-Transformer، التي تساعد النظام على ملاحظة العلاقات عبر أجزاء بعيدة من الصورة بدلاً من التركيز فقط على بقع صغيرة. ثانياً، أضافوا وحدة متعددة المقاييس ومحسّنة للتفاصيل تولي اهتمامًا خاصًا للحواف الدقيقة والأشكال الصغيرة بمقاسات مختلفة. عملت هاتان الإضافتان معًا على جعل النموذج أفضل بكثير في التمييز ما إذا كانت الدائرة الداكنة الصغيرة رأس برغي فعليًا، أو ثقب فارغ، أو مجرد بقعة مربكة في الخلفية. 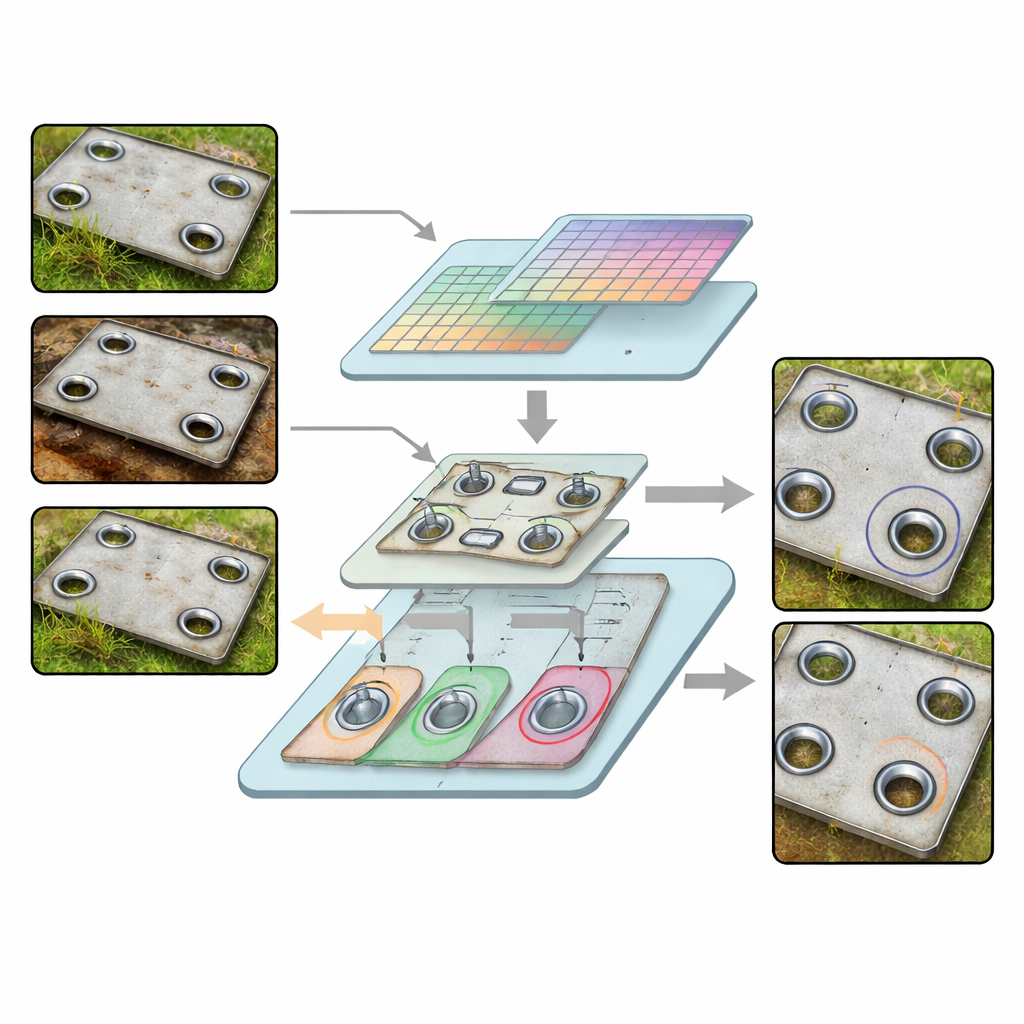
إثبات الأداء في ظروف صعبة
ثم خضع النظام المحسّن لسلسلة من اختبارات الإجهاد. حلّل صورًا لبراغي مرئية من زوايا طفيفة وحادة، وتحت إضاءة خافتة وطبيعية وساطعة للغاية، وعلى صفائح فولاذية مطلية باللون الأحمر أو الأبيض أو الأزرق ومصورة أمام محيط عشبي فوضوي. في معظم هذه الحالات، حكم النموذج على حالة البرغي بشكل صحيح في كل مرة تقريبًا؛ حتى عند أقصى زوايا الكاميرا والإضاءات الأشد سطوعًا، حافظت الدقة على مستوى يزيد عن نحو 90 بالمئة. أخيرًا، حلّق الباحثون بطائرة دون طيار على طول جسر معلق عمره 15 عامًا، ملتقطين آلاف صور التفتيش الحقيقية. فحص النموذج أكثر من 12,700 مجموعة براغي، محددًا تقريبًا جميعها بدقة ومشيرًا إلى برغي واحد فعلاً مفقود بين عشرات الآلاف — علامة قوية على أن الطريقة يمكن أن تعمل خارج المختبر.
ما الذي يعنيه هذا للسلامة اليومية
بالنسبة لغير المتخصصين، الرسالة الرئيسية هي أن فحوصات السلامة الروتينية على الهياكل الفولاذية الكبيرة قد تعتمد قريبًا بدرجة أقل على الأشخاص الذين يزحفون على العوارض بحاملي القوائم والمزيد على الطائرات دون طيار والخوارزميات الذكية. من خلال التعلم من مجموعة صور مبنية وموزّعة بعناية، وباستخدام حيل متقدمة لمعالجة الصور لرؤية ما وراء الفوضى، يستطيع النظام في هذه الدراسة أن يحدد بثقة ما إذا كان البرغي موجودًا أو مفقودًا، حتى عندما تكون الظروف بعيدة عن المثالية. وعلى الرغم من أنه ليس خاليًا من العيوب، فإنه يؤدّي جيدًا بدرجة كافية ليكون مساعدًا قويًا للمفتشين البشريين، يساعدهم على التركيز على الأماكن القليلة التي قد توجد فيها مشكلات حقيقية وفي النهاية يساهم في جسور وأبراج أكثر أمانًا مع تعطيل أقل وتكلفة أدنى.
الاستشهاد: Gu, Y., Peng, D., Song, J. et al. Image-based detection of bolts and bolt-missing defects in multi-angle and complex background scenarios. Sci Rep 16, 11590 (2026). https://doi.org/10.1038/s41598-026-41036-x
الكلمات المفتاحية: مراقبة الصحة الإنشائية, تفتيش الجسور, رؤية الحاسوب, التعلّم العميق, عيوب البراغي