Clear Sky Science · sv
Ramverk för upptäckt av grupper baserat på 3D-formbeskrivare för trädartsklassificering i punktmolnsdata
Varför det spelar roll att sortera träd från skyn
Skogar kyler städer, stabiliserar sluttningar, lagrar kol och ger skydd åt vilda djur — men inte alla träd spelar samma roll. Att veta vilka arter som växer var kräver ofta tidskrävande fältarbete. Denna artikel introducerar ett sätt att automatiskt känna igen trädarter från tredimensionella mätningar insamlade med laser från flygplan, drönare eller markbaserade skannrar. Istället för att förlita sig på stora, handmärkta träningsset för maskininlärningsmodeller visar författarna hur träd kan sortera sig själva i meningsfulla grupper baserat enbart på deras tredimensionella form.
Att betrakta skogar i 3D
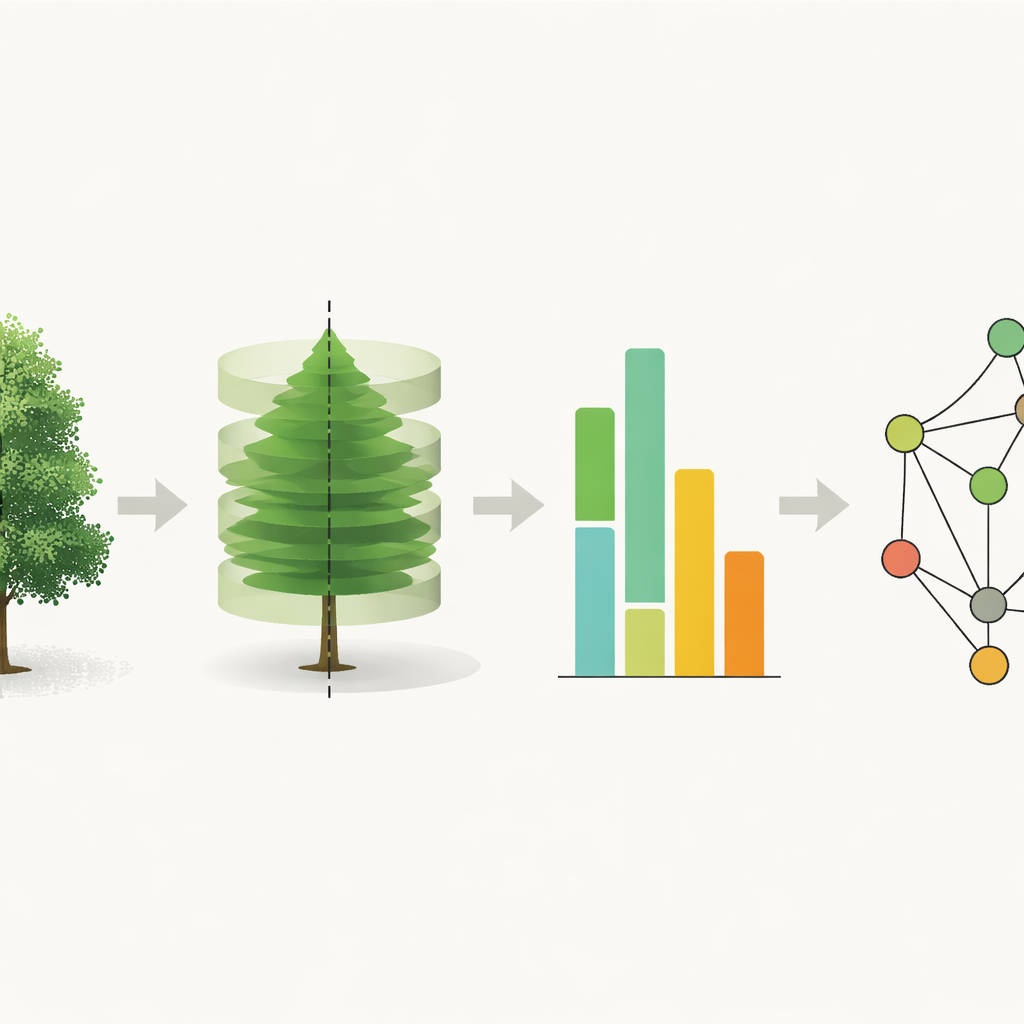
Moderna laserskanningar, ofta kallade LiDAR, fångar skogar som täta ”punktmoln”: miljontals små prickar som tecknar konturerna av stammar och kronor. Dessa data kan visa trädens höjd, kronans bredd och övergripande form. Utmaningen är att träd av samma art kan se mycket olika ut beroende på ålder, konkurrens, vind och ljus, medan olika arter ibland kan likna varandra. De flesta nuvarande metoder angriper detta med övervakad maskininlärning, vilket kräver omfattande, noggrant förberedda träningsdata anpassade till varje region och sensor, och kan ha svårt med sällsynta eller ovanliga träd.
Låta träden bilda sina egna grupper
Författarna föreslår en annan strategi: istället för att direkt förutsäga art från rådata låter de först träden ”bilda gemenskaper” baserat på hur lika deras former är. Varje individuellt träd representeras av en kompakt beskrivning av sin 3D-krona. För att bygga denna beskrivning analyserar de hur punkterna sprids längs tre huvudriktningar och omvandlar sedan molnet till ett rutnät av små 3D-block. Genom att rotera trädet kring dess vertikala axel och jämföra originalet med den roterade versionen skiva för skiva fångar de både hur symmetrisk kronan är och hur bred och tät den är på olika höjder. Dessa mått jämnas ut till ett fåtal kurvkoefficienter och bildar en kort funktionsvektor som är stabil även när punktmolnet är brusigt, glest eller roterat.
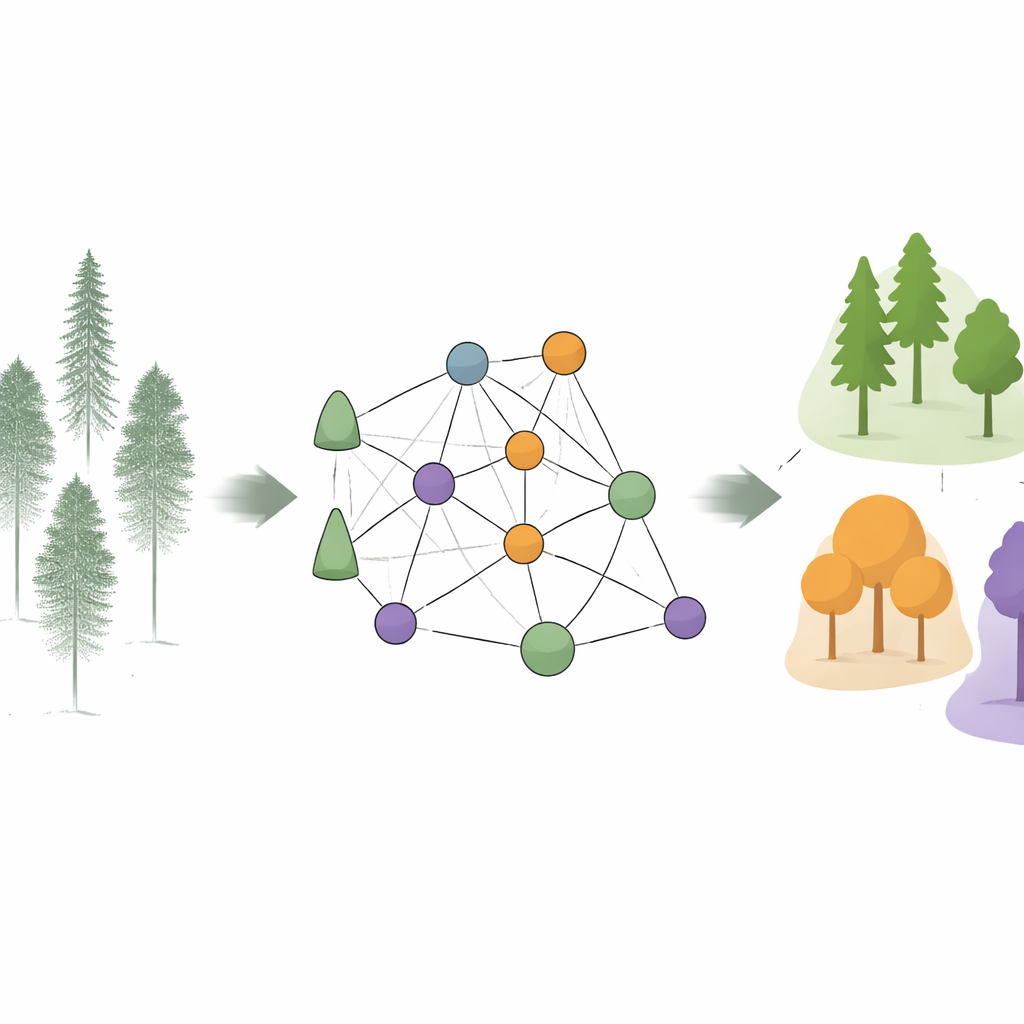
Från formavtryck till trädgemenskaper
När varje träd har ett formavtryck jämför metoden alla träd med varandra. Par med mycket lika egenskaper länkas med starka förbindelser; olikartade par får svagare länkar. Det skapas ett nätverk där varje träd är en nod och länkstyrkan speglar hur lika kronor är. En algoritm för gemenskapsdetektion — ursprungligen utvecklad för att hitta tätt sammanknutna grupper i sociala nätverk — söker i denna graf efter kluster av träd som är starkare förbundna med varandra än med resten. Varje sådan gemenskap tenderar att innehålla mest träd av samma art, även om den också kan isolera ovanliga individer eller små grupper med atypiska former.
Test i syntetiska och verkliga skogar
För att se hur väl detta fungerar tillämpade författarna sitt ramverk på två publika dataset. Det första är en syntetisk samling av 100 träd från 10 arter, genererade av en tillväxtsimulator. Här återfann metoden perfekt de sanna artsgrupperna: varje simulerad art bildade sin egen täta gemenskap. Det andra datasetet består av nästan 700 verkliga träd från sju arter skannade i tyska och amerikanska skogar. I denna brusigare och mer varierade miljö överensstämde gemenskaperna fortfarande i stora drag med arterna, men vissa arter med liknande former slog sig samman till blandade grupper och vissa arter delades upp i flera formbaserade gemenskaper. Viktigt är att ramverket förblev robust när punktmolnen utarmades, roterades eller bearbetades med något olika rutsstorlekar, och det presterade bättre än vanliga klustringstekniker som k‑medel och hierarkisk klustring på samma egenskaper.
Hjälpa människor märka mindre och lära mer
Det sista steget är att omvandla gemenskaper till artsbeteckningar. Istället för att manuellt märka hundratals enskilda träd behöver en användare bara identifiera ett fåtal träd i varje gemenskap. Majoritetslappen tilldelas sedan resten av gruppen. I det verkliga datasetet nådde detta semi‑automatiska tillvägagångssätt cirka 60 % total noggrannhet, jämförbart med vissa djupinlärningsmetoder som kräver mycket mer träningsdata och finjustering. När samma formegenskaper gavs till en standard support‑vector‑maskin med tillräckliga träningsexempel steg noggrannheten till omkring 80 %, vilket visar att egenskaperna i sig fångar artsrelevant information effektivt.
Vad detta betyder för skogsövervakning
För en icke‑specialist är huvudidén att trädarter kan härledas från 3D‑form ensam genom att låta träden ”hitta sina egna grannar” i ett likhetsnätverk. Detta gemenskapsbaserade tillvägagångssätt ersätter inte avancerad maskininlärning, men det kan kraftigt minska det manuella arbete som krävs för att förbereda träningsset och lyfta fram avvikare som döda eller mycket ovanliga träd. Allteftersom mer LiDAR‑data blir tillgängliga världen över kan sådana tolkningsbara, träningslättade metoder snabba upp skapandet av detaljerade trädinventarier och stödja bättre skogsförvaltning, klimatsimuleringar och bevarandeplanering.
Citering: Kohek, Š., Žalik, B., Mongus, D. et al. Community detection framework based on 3D shape descriptors for tree species classification in point cloud data. Sci Rep 16, 12091 (2026). https://doi.org/10.1038/s41598-026-42392-4
Nyckelord: LiDAR-skogar, trädartsklassificering, 3D-punktmoln, gemenskapsdetektion, fjärranalys ekologi