Clear Sky Science · ru
Фреймворк обнаружения сообществ на основе 3D‑дескрипторов формы для классификации видов деревьев в данных точечных облаков
Почему важно различать деревья с высоты
Леса охлаждают города, стабилизируют склоны, запасают углерод и служат убежищем для дикой природы — но не все деревья выполняют одинаковые функции. Знание того, какие виды растут в каких местах, обычно требует трудоёмкой полевой работы. В этой статье предложен способ автоматического распознавания видов деревьев по трёхмерным измерениям, собранным лазерами с самолётов, дронов или наземных сканеров. Вместо того чтобы полагаться на большие размеченные обучающие выборки для методов машинного обучения, авторы показывают, как деревья могут самостоятельно сгруппироваться в осмысленные группы исключительно на основе своей трёхмерной формы.
Смотрим на леса в 3D
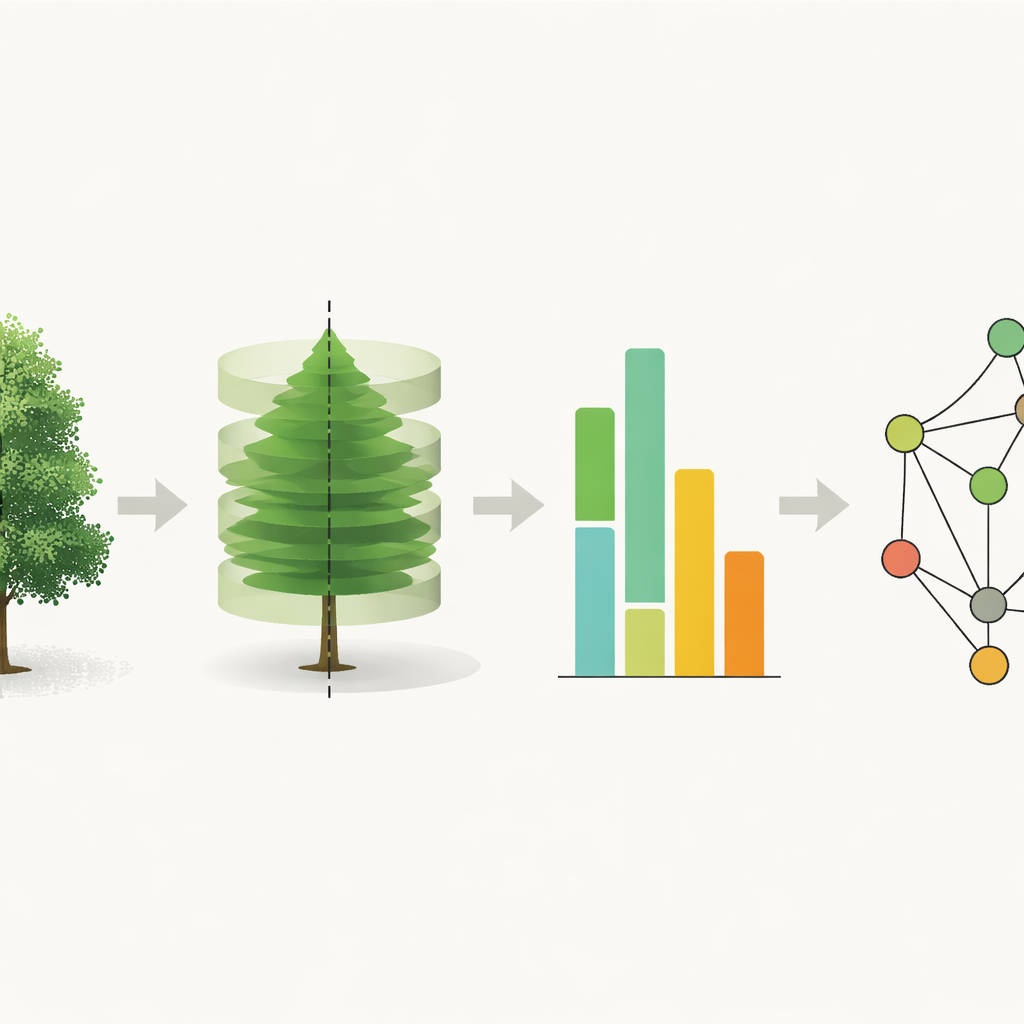
Современное лазерное сканирование, часто называемое LiDAR, захватывает леса в виде плотных «точечных облаков»: миллионов маленьких точек, описывающих силуэты стволов и крон. Эти данные позволяют оценить высоту деревьев, ширину кроны и общую форму. Задача осложняется тем, что деревья одного вида могут выглядеть по‑разному в зависимости от возраста, конкуренции, ветра и освещённости, тогда как разные виды иногда бывают схожи внешне. Большинство текущих методов решают эту проблему с помощью контролируемого машинного обучения, которое требует обширных, тщательно подготовленных обучающих данных, специфичных для региона и датчика, и с трудом справляется с редкими или необычными экземплярами.
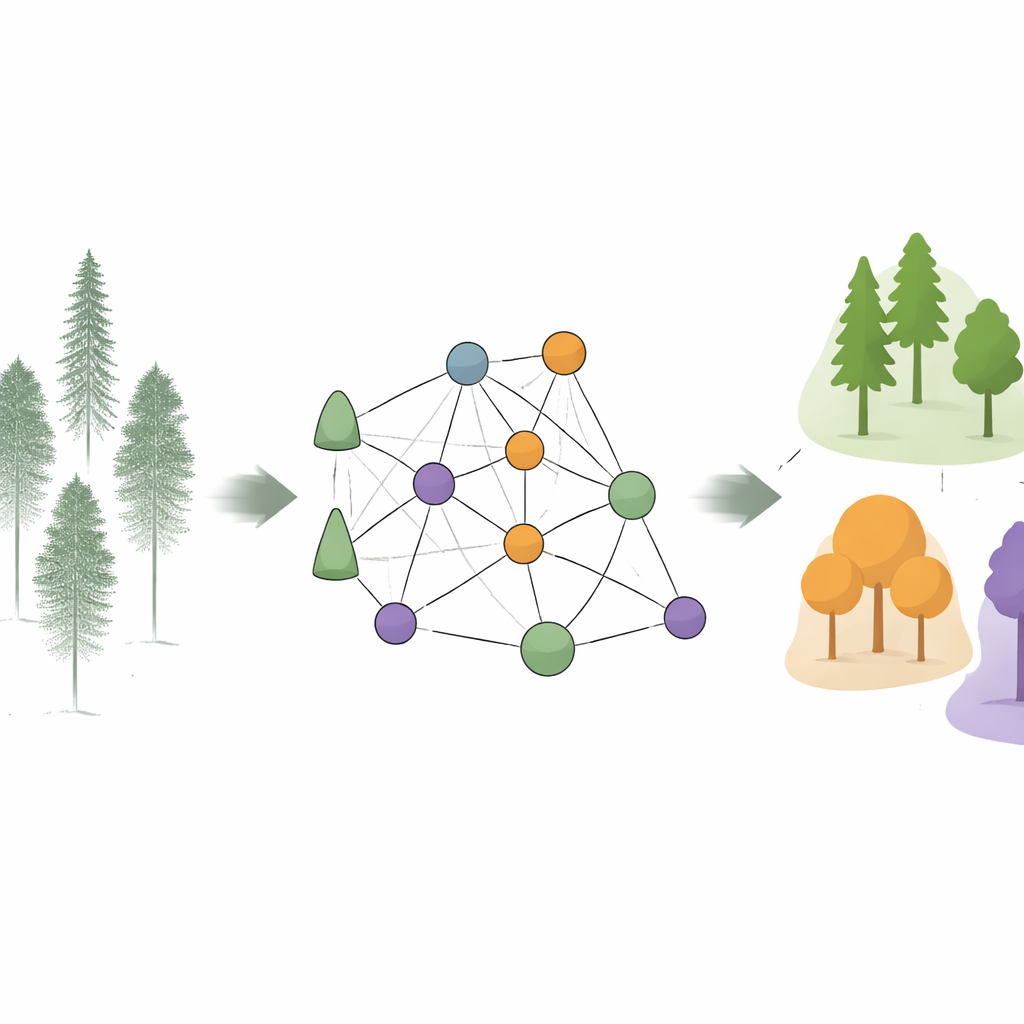
Пусть деревья образуют собственные группы
Авторы предлагают иную стратегию: вместо прямого предсказания вида по сырым данным они сначала позволяют деревьям «образовать сообщества» на основе сходства их форм. Каждое дерево представлено компактным описанием своей 3D‑кроны. Для построения этого описания анализируют распределение точек по трём главным направлениям, затем преобразуют облако в сетку маленьких 3D‑блоков. Поворачивая дерево вокруг вертикальной оси и сравнивая оригинал и повернутую версии по срезам, они фиксируют как симметрию кроны, так и её ширину и плотность на разных высотах. Эти измерения сглаживаются в несколько коэффициентов кривой, формируя короткий вектор признаков, устойчивый даже при шуме, разреженности или поворотах точечного облака.
От отпечатков формы к сообществам деревьев
Когда у каждого дерева есть «отпечаток» формы, метод сравнивает все деревья между собой. Пары с очень похожими признаками связываются сильными связями; непохожие пары получают слабые. Так создаётся сеть, где каждое дерево — узел, а сила связей отражает сходство крон. Алгоритм обнаружения сообществ — изначально разработанный для поиска плотных групп в социальных сетях — исследует этот граф в поисках кластеров деревьев, которые сильнее связаны между собой, чем с остальными. Каждое такое сообщество, как правило, содержит в основном деревья одного вида, хотя может выделять и необычные экземпляры или небольшие группы с нетипичной формой.
Тестирование метода на синтетических и реальных лесах
Чтобы оценить эффективность, авторы применили фреймворк к двум открытым наборам данных. Первый — синтетическая коллекция из 100 деревьев 10 видов, сгенерированная симулятором роста. Там метод идеально восстановил истинные видовые группы: каждый смоделированный вид сформировал собственное компактное сообщество. Второй набор содержит почти 700 реальных деревьев семи видов, отсканированных в лесах Германии и США. В более шумной и разнообразной обстановке сообщества по‑прежнему в целом соответствовали видам, но некоторые виды с похожей формой сливались в смешанные группы, а другие разбивались на несколько сообществ по форме. Важно, что фреймворк оставался устойчивым при разрежении точечных облаков, их повороте или при небольших изменениях размера сетки, и превосходил стандартные методы кластеризации, такие как k‑means и иерархическая кластеризация, при использовании тех же признаков.
Помощь в маркировке: меньше меток — больше знаний
Последний шаг преобразует сообщества в метки видов. Вместо разметки сотен отдельных деревьев пользовательу нужно идентифицировать лишь несколько деревьев в каждом сообществе. Остальным присваивается метка большинства. На реальном наборе данных этот полуавтоматический подход дал примерно 60% общей точности, сравнимо с некоторыми методами глубокого обучения, требующими гораздо больших объёмов обучающих данных и настройки. Когда те же признаки формы передали стандартному классификатору опорных векторов при наличии достаточного числа размеченных примеров, точность выросла примерно до 80%, что показывает, что сами признаки хорошо кодируют информацию, релевантную видам.
Что это означает для мониторинга лесов
Для неспециалиста ключевая идея в том, что виды деревьев можно вывести только по 3D‑форме, позволив деревьям «найти соседей» в сети сходств. Этот подход на основе сообществ не заменяет продвинутые методы машинного обучения, но может существенно сократить ручной труд при подготовке обучающих наборов и выделять аномалии, такие как погибшие или сильно нетипичные деревья. По мере роста доступности LiDAR‑данных по всему миру такие интерпретируемые, не требующие больших аннотированных наборов методы могут ускорить создание детальных реестров деревьев, поддерживая лучшее управление лесами, моделирование климата и планирование охраны природы.
Цитирование: Kohek, Š., Žalik, B., Mongus, D. et al. Community detection framework based on 3D shape descriptors for tree species classification in point cloud data. Sci Rep 16, 12091 (2026). https://doi.org/10.1038/s41598-026-42392-4
Ключевые слова: ЛиDAR леса, классификация видов деревьев, 3D точечные облака, обнаружение сообществ, дистанционное зондирование экологии