Clear Sky Science · ja
点群データにおける樹種分類のための3D形状記述子に基づくコミュニティ検出フレームワーク
空から樹木を識別する意義
森林は都市を冷やし、斜面を安定させ、炭素を貯蔵し、野生生物に棲みかを提供しますが、すべての樹木が同じ役割を果たすわけではありません。どこにどの種が生えているかを知るには通常、手間のかかる現地調査が必要です。本論文は、航空機やドローン、地上スキャナのレーザーで取得した3次元測定から自動的に樹種を認識する手法を提示します。著者らは、多数の手作業でラベル付けされた訓練データに頼る代わりに、三次元形状だけを基に樹木を意味あるグループに自律的に分類できることを示します。
森林を3次元で眺める
現代のレーザースキャン(一般にLiDARと呼ばれる)は、森林を密な「点群」として捉えます:幹や樹冠の輪郭を描く数百万の微小点です。これらのデータから樹高や樹冠幅、全体的な形状が分かります。課題は、同一種でも年齢や競争、風や光の条件で見た目が大きく変わる一方で、異なる種が紛らわしく似ることがある点です。現在の多くの手法は教師あり機械学習でこの問題に対処しますが、多地域や異なるセンサーに対応するには膨大で精緻に準備された訓練データを必要とし、希少種や異常個体に弱いことがあります。
樹木に自らグループを作らせる
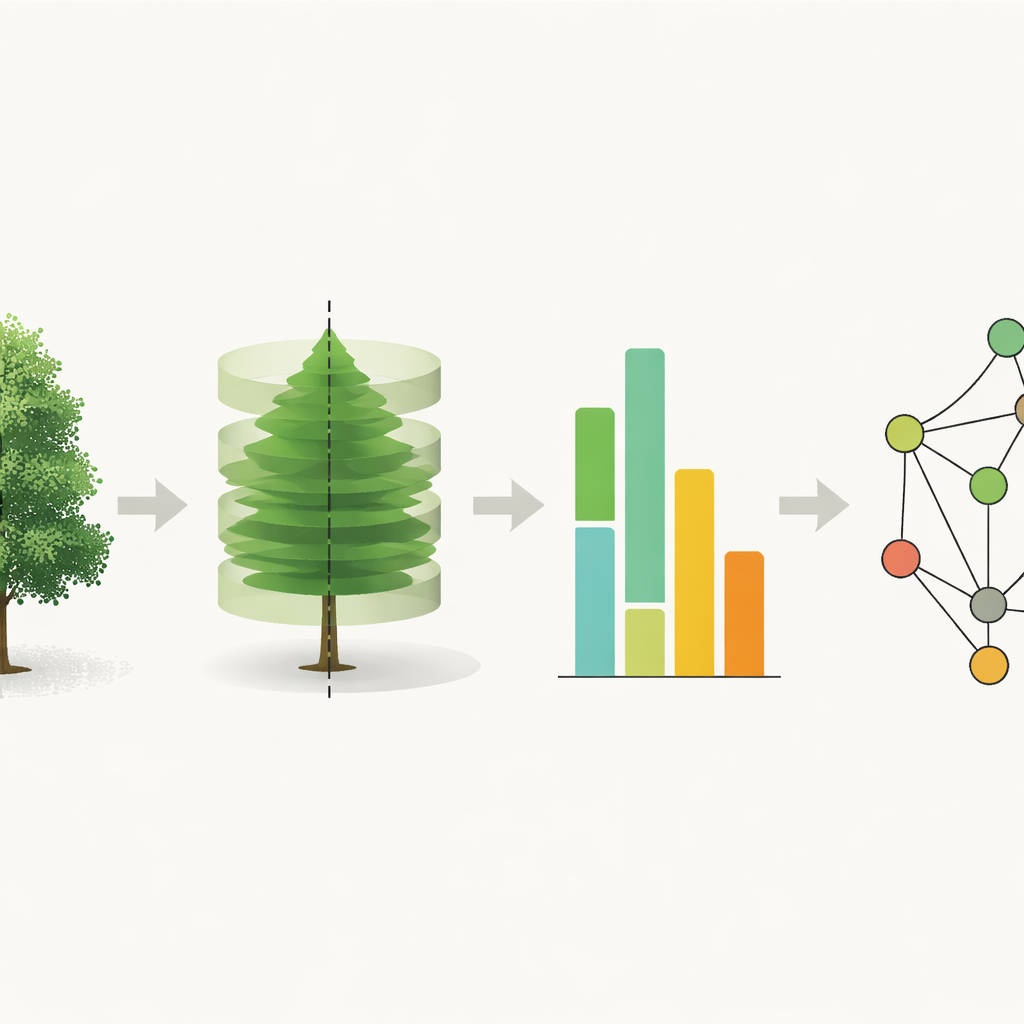
著者らは別の戦略を提案します:生データから直接種を推定するのではなく、まず形状の類似性に基づいて樹木が「コミュニティを形成する」ようにします。各樹木は3次元の樹冠を簡潔に記述するフィンガープリントで表されます。この記述を作るために、点群が主方向に沿ってどのように広がるかを解析し、点群を小さな3Dブロックの格子に変換します。樹木を鉛直軸まわりに回転させ、元の形と回転後の形をスライスごとに比較することで、樹冠の対称性や高さごとの幅や密度を捉えます。これらの測定は滑らかにされて曲線の係数数個に要約され、点群がノイズや間引き、回転を受けても安定な短い特徴ベクトルが得られます。
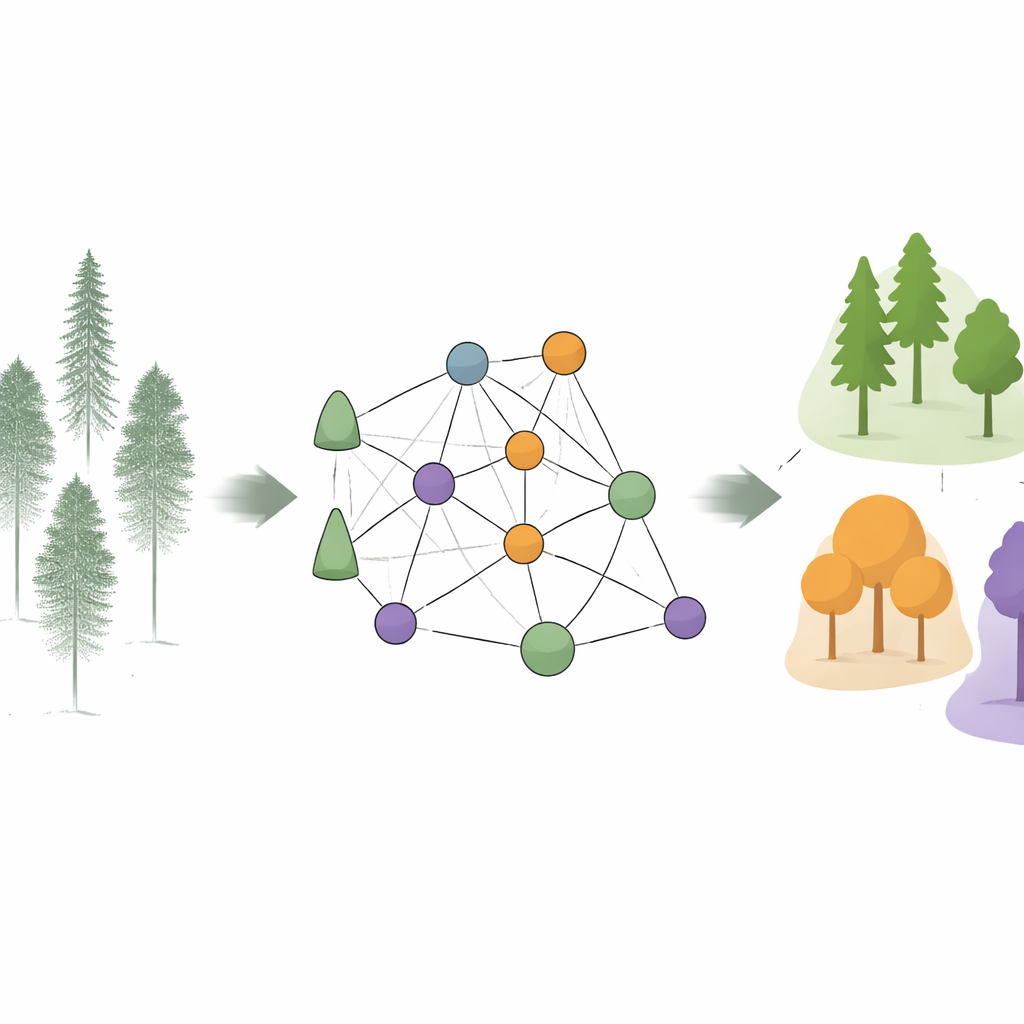
形状フィンガープリントから樹木コミュニティへ
全ての樹木に形状フィンガープリントが付与されると、手法は樹木同士を相互に比較します。非常に類似した特徴の対は強い結びつきでリンクされ、異なる対は弱い結びつきになります。こうして各樹木がノードとなり、リンクの強さが樹冠の類似度を表すネットワークが構築されます。コミュニティ検出アルゴリズム(もともとはソーシャルネットワーク上の緊密な群れを見つけるために開発されたもの)が、このグラフ上で互いに強く結びつく木のクラスタを探索します。そのようなコミュニティは概して同一種の樹木を多く含みますが、異常な個体や典型的でない形状を持つ小さな群を分離することもあります。
合成林と実森林での検証
性能検証のために、著者らはこのフレームワークを二つの公開データセットに適用しました。第一は成長シミュレータで生成された10種・合計100本の合成コレクションです。ここでは手法は真の種グループを完全に再現し、各シミュレート種が独立した緊密なコミュニティを形成しました。第二のデータセットはドイツと米国の森林でスキャンされた7種・約700本の実樹木からなります。よりノイジーで多様なこの環境でも、コミュニティは概ね種と一致しましたが、形状が似た種が混在グループを形成したり、ある種が複数の形状ベースのコミュニティに分かれる例もありました。重要なのは、点群が間引かれたり回転されたり、格子サイズが多少変わってもフレームワークが堅牢であり、同じ特徴に対するk平均や階層クラスタリングといった標準的なクラスタリング手法より良好な結果を示した点です。
ラベル付けを減らし学習を促す
最後のステップはコミュニティを樹種ラベルに変換することです。何百本もの個別木を手作業でラベル付けする代わりに、ユーザは各コミュニティから数本を特定するだけでよく、多数派ラベルをそのコミュニティの残りに割り当てます。実データセットではこの半自動アプローチで全体精度約60%に達し、はるかに多くの訓練データと調整を要する一部の深層学習手法に匹敵しました。同じ形状特徴を十分な訓練例とともに標準的なサポートベクターマシンに与えると、精度は約80%に上がり、これらの特徴が樹種関連の情報を効果的に捉えていることを示しました。
森林モニタリングへの含意
非専門家にとっての核心は、樹木を「類似性ネットワークの中で自らの近隣を見つけさせる」ことで、3D形状だけから樹種を推定できるという点です。このコミュニティベースの手法が高度な機械学習に取って代わるわけではありませんが、訓練データの準備に必要な手作業を大幅に減らし、枯死木や非常に異常な樹木といった外れ値を浮かび上がらせる助けになります。世界中でより多くのLiDARデータが利用可能になる中で、このように解釈可能で訓練負担の軽い手法は、詳細な樹木台帳作成を加速し、より良い森林管理、気候モデル、保全計画を支える可能性があります。
引用: Kohek, Š., Žalik, B., Mongus, D. et al. Community detection framework based on 3D shape descriptors for tree species classification in point cloud data. Sci Rep 16, 12091 (2026). https://doi.org/10.1038/s41598-026-42392-4
キーワード: LiDAR 森林, 樹種分類, 3D 点群, コミュニティ検出, リモートセンシング生態学