Clear Sky Science · ru
Распределённый мультисенсорный ISAC
Преобразование сетей телефонии в невидимый радар
Представьте, что те же беспроводные сети, которые соединяют наши телефоны, также могли бы наблюдать за дорогами, защищать электростанции и обнаруживать враждебные дроны — без установки ни одной дополнительной радиолокационной вышки. В этой статье исследуется, как будущие мобильные сети 6G могут выполнять роль обширной распределённой системы наблюдения, используя свои существующие радиосигналы для обнаружения и отслеживания объектов в окружающей среде, подобно гигантскому невидимому радару, рассыпанному по городам, шоссе и небу.

Видеть многими «ухами» вместо одного «глаза»
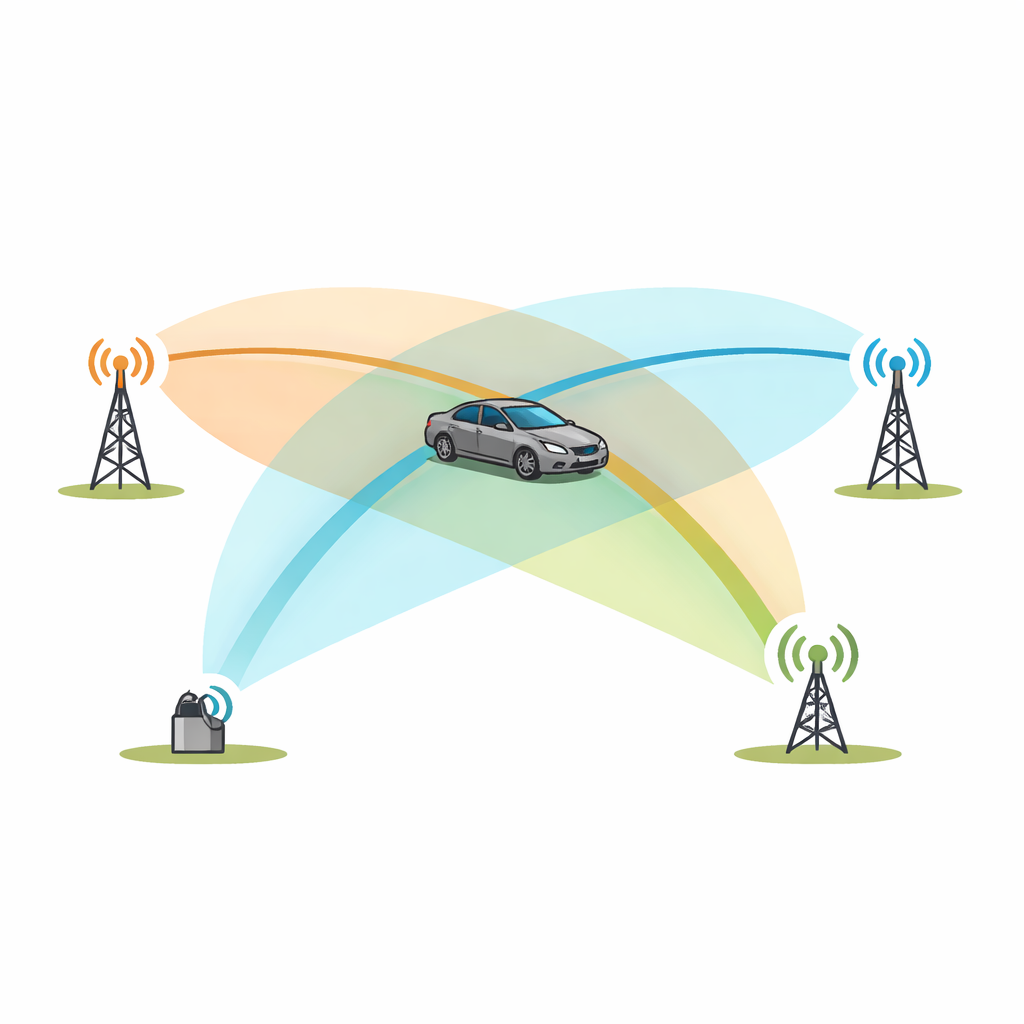
Традиционный радар работает как мощный прожектор и камера, установленные в одной точке: он посылает собственные импульсы и слушает эхо от целей. Авторы предлагают иной подход — «распределённый мультисенсорный ISAC», где многие радиоузлы — базовые станции, удалённые радиоблоки и даже автомобили или дроны — действуют совместно. Каждый из них может передавать или принимать обычные коммуникационные сигналы, но в совокупности они формируют сеть измерительных путей, которые отражаются от объектов сцены. Сравнивая время распространения и частотные сдвиги этих отражений по множеству пар передатчик–приёмник, сеть может восстановить положение целей и их движение в трёх измерениях, даже если ни один узел не имеет полного обзора.
Три способа, которыми сеть может воспринимать мир
В статье описаны три основных архитектурных варианта. При сенсинге только инфраструктуры участвуют лишь фиксированные элементы сети — например, базовые станции и небольшие «сниффер»-приёмники. Это хорошо подходит для круглосуточного контроля больших промышленных площадок, портов, линий электропередачи или дорожных развязок, без привлечения устройств пользователей и их данных. В режиме аплинк/даунлинк пользователи, такие как автомобили или дроны, становятся частью цикла сенсинга: иногда они освещают сцену, иногда выступают в роли мобильных приёмников, добавляя новые точки наблюдения там, где инфраструктура разрежена или заблокирована. Третий режим опирается на прямые связки устройство–устройство, формируя адхок-сети автомобилей или дронов, которые обмениваются как коммуникационными, так и сенсорными сигналами. При плотном движении или в роях дронов такое «боковое» сенсирование может собрать совместную картину окружения, богатую по информации и превосходящую данные одиночных бортовых сенсоров.
От запутанных эхо к ясным картинкам
Реальные радиосигналы отражаются, рассеиваются и дифрагируют от зданий, транспортных средств и земли, создавая сеть перекрывающихся эхо. Для связи многое из этого рассматривается как помеха, подлежащая выравниванию; для сенсинга это одновременно и вызов, и ресурс. Авторы объясняют, как сеть может восстановить фактически передаваемую форму волны на приёмнике, а затем применить продвинутую обработку сигналов, чтобы отделить полезные эхо от шумового фона. Вместо опоры на простые гридовые преобразования Фурье — которые дают сбои, когда радиоресурсы разрежены и фрагментированы — они предлагают моделирующую оценку, которая подгоняет небольшое число путей с конкретными задержками и доплеровскими сдвигами прямо под измеренные данные. Это обеспечивает высокое разрешение по дальности и скорости даже тогда, когда доступна лишь часть частот и временных слотов, как это типично в загруженных 5G/6G кадрах.
Совместная работа в пространстве, времени и частоте
Поскольку многие узлы делят одни и те же эфирные ресурсы, их сенсорные действия должны быть тщательно расписаны. В статье описывается, как временные и частотные «ресурсные блоки» могут быть размещены так, чтобы несколько сенсорных связей сосуществовали, не мешая друг другу, при этом оставляя пропуск для обычного пользовательского трафика. Некоторые блоки могут быть расположены на краях доступного спектра для улучшения разрешения по дальности; другие выделяются во времени, чтобы перемещающиеся цели можно было отслеживать без неоднозначностей. Антенные фазированные решётки добавляют ещё один уровень: направляя лучи к целям или вдоль ключевых направлений, сеть может подавлять помехи и повышать чувствительность. В большем масштабе несколько площадок или роёв обмениваются локальными оценками, объединяя их в треки автомобилей, дронов или людей, опираясь на классические методы трекинга, такие как фильтр Калмана, и на современные методы машинного обучения.
От концепции к сети-стражу
Чтобы показать практическую работоспособность идей, авторы приводят полевой эксперимент с одним передатчиком, двумя приёмниками и движущимся автомобилем. На простых графиках времени против дальности эхо от автомобиля почти незаметно на фоне более сильных отражений от зданий. Однако после обработки данных и представления их в совместном представлении по дальности и доплеру движущийся автомобиль чётко выделяется на статическом фоне. Комбинируя измерения обоих приёмников, сеть может оценить положение автомобиля, хотя геометрия в этом небольшом эксперименте ещё не оптимальна. При масштабировании до плотных развертываний 6G те же принципы могут дать мобильным операторам новую роль: предоставление «сенсинга как услуги» для безопасности дорожного движения, управления дронами и защиты критической инфраструктуры — всё это путём повторного использования радиостанций и спектра, которыми они уже располагают.
Цитирование: Thomä, R., Andrich, C., Döbereiner, M. et al. Distributed multisensor ISAC. npj Wirel. Technol. 2, 22 (2026). https://doi.org/10.1038/s44459-026-00041-2
Ключевые слова: интегрированное обнаружение и связь, распределённый MIMO-радар, мобильные сети 6G, беспроводная локализация, умная инфраструктура