Clear Sky Science · pt
Sistema ISAC multissensor distribuído
Transformando redes de telefonia em um radar invisível
Imagine se as mesmas redes sem fio que conectam nossos telefones pudessem também vigiar estradas, proteger usinas e detectar drones descontrolados—sem instalar uma única torre de radar extra. Este artigo explora como as futuras redes móveis 6G podem duplicar como um vasto sistema de sensoriamento distribuído, usando seus sinais de rádio existentes para detectar e rastrear objetos no ambiente, como um grande radar invisível espalhado por cidades, rodovias e o espaço aéreo.

Ver com muitas orelhas em vez de um olho
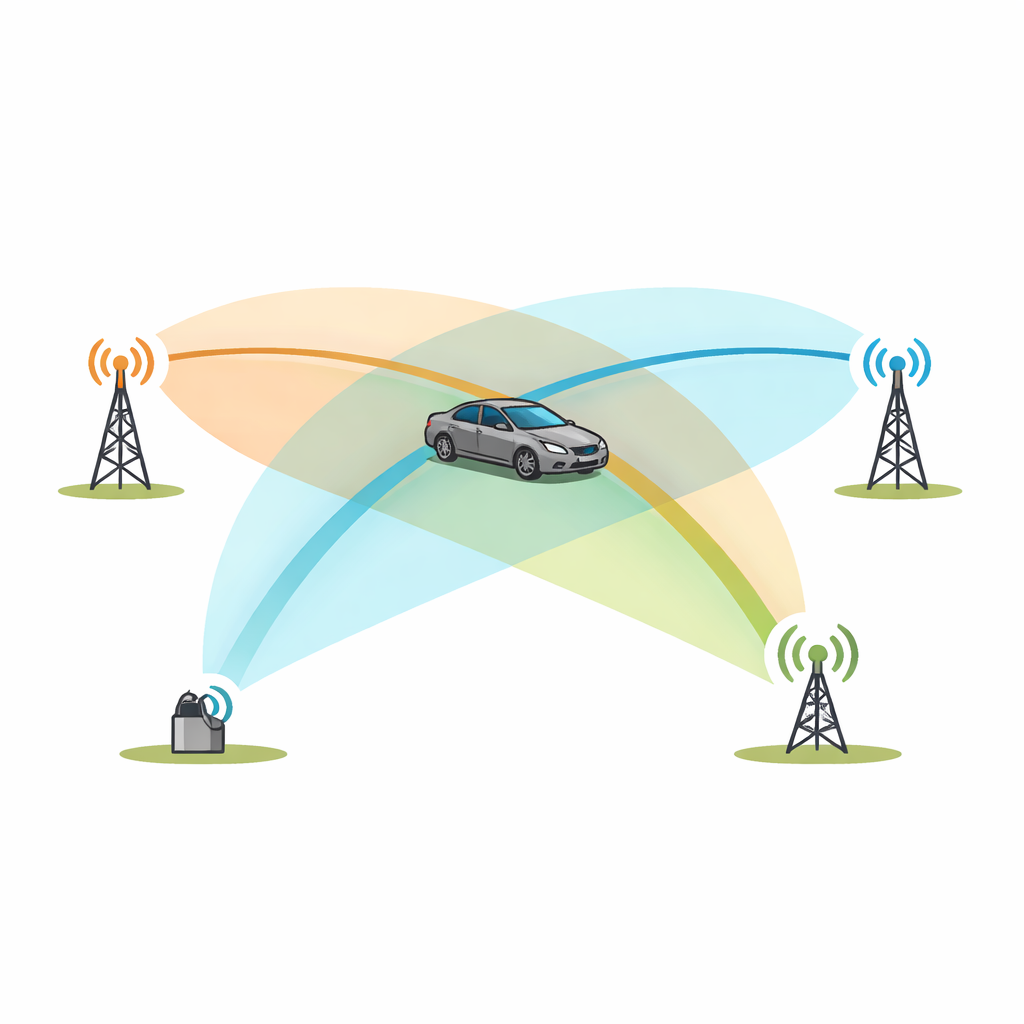
O radar tradicional funciona como um holofote potente e uma câmera montada em um único ponto: emite seus próprios pulsos e escuta os ecos dos alvos. Os autores propõem em vez disso o “ISAC multissensor distribuído”, onde muitos nós de rádio—torres de celular, unidades remotas de rádio e até veículos ou drones—cooperam. Cada um pode transmitir ou receber sinais de comunicação comuns, mas juntos formam uma teia de trajetórias de medição que refletem em objetos da cena. Ao comparar o tempo de percurso e o desvio de frequência dessas reflexões entre múltiplos pares transmissor–receptor, a rede pode inferir onde estão os alvos e como se movem em três dimensões, mesmo que nenhum nó individual tenha uma visão perfeita.
Três maneiras de a rede perceber o mundo
O artigo descreve três principais arquiteturas. No sensoriamento apenas por infraestrutura, participam somente elementos fixos da rede—como estações base e pequenos receptores “sniffer”. Isso é bem adequado para vigiar grandes áreas industriais, portos, linhas de energia ou entroncamentos rodoviários 24 horas por dia, sem envolver os dispositivos dos usuários nem seus dados. No sensoriamento uplink/downlink, dispositivos dos usuários como carros ou drones fazem parte do laço de sensoriamento: às vezes iluminam a cena, às vezes atuam como receptores móveis, adicionando novos pontos de observação onde a infraestrutura é escassa ou bloqueada. Um terceiro modo depende de enlaces diretos entre dispositivos, formando malhas ad hoc de carros ou drones que trocam sinais tanto de comunicação quanto de sensoriamento. Em tráfego intenso ou enxames de drones, esse sensoriamento por “side-link” pode montar uma visão compartilhada do entorno mais rica do que os sensores embarcados de qualquer veículo isolado.
De ecos confusos a imagens nítidas
Os sinais de rádio do mundo real refletem, espalham-se e se difratam em edifícios, veículos e no solo, criando uma trama de ecos sobrepostos. Para comunicações, grande parte disso é tratado como um incômodo a ser equalizado; para o sensoriamento, pode ser tanto um desafio quanto um recurso. Os autores explicam como a rede pode reconstruir a forma de onda transmitida no receptor e então usar processamento avançado de sinal para separar ecos úteis de alvos do clutter. Em vez de depender de transformadas de Fourier em grade simples—que falham quando os recursos de rádio são escassos e fragmentados—eles defendem estimativas baseadas em modelos que ajustam diretamente um pequeno número de trajetórias com atrasos e deslocamentos Doppler específicos aos dados medidos. Isso permite medição de distância e velocidade com alta resolução mesmo quando apenas um subconjunto de frequências e intervalos de tempo está disponível, como é típico em um quadro 5G/6G congestionado.
Trabalhando juntos no espaço, tempo e frequência
Como muitos nós compartilham as mesmas ondas aéreas, suas atividades de sensoriamento devem ser cuidadosamente agendadas. O artigo descreve como blocos de recurso em tempo e frequência podem ser divididos para que múltiplos enlaces de sensoriamento coexistam sem interferir entre si, mantendo ainda espaço para o tráfego de dados normal. Alguns blocos podem ser posicionados nas bordas do espectro disponível para afinar a resolução de distância; outros são alocados no tempo para que alvos em movimento possam ser acompanhados sem ambiguidade. Arrays de antenas adicionam outra camada: ao direcionar feixes para alvos ou ao longo de direções-chave, a rede pode suprimir o clutter e melhorar a sensibilidade. Em uma área maior, múltiplos sítios ou enxames compartilham suas estimativas locais, fundindo-as em trilhas de carros, drones ou pessoas, auxiliados por métodos clássicos de rastreamento como filtragem de Kalman e por técnicas mais recentes de aprendizado de máquina.
Do conceito à rede guardiã
Para demonstrar que essas ideias funcionam na prática, os autores relatam um experimento de campo com um transmissor, dois receptores e um carro em movimento. Em gráficos simples de tempo versus alcance, o eco do carro é quase invisível em meio a reflexões mais fortes de edifícios. Depois que os dados são processados em uma visão conjunta de alcance–Doppler, entretanto, o carro em movimento sobressai claramente do fundo estático. Ao combinar medições de ambos os receptores, a rede pode estimar a posição do carro, embora a geometria nesse pequeno teste ainda não seja ótima. Ao escalar para implantações densas em 6G, os mesmos princípios poderiam conferir às operadoras móveis um novo papel: fornecer “sensoriamento como serviço” para segurança viária, gerenciamento de drones e proteção de infraestrutura crítica, reutilizando os rádios e o espectro que já operam.
Citação: Thomä, R., Andrich, C., Döbereiner, M. et al. Distributed multisensor ISAC. npj Wirel. Technol. 2, 22 (2026). https://doi.org/10.1038/s44459-026-00041-2
Palavras-chave: sensoriamento integrado e comunicação, radar MIMO distribuído, redes móveis 6G, localização sem fio, infraestrutura inteligente