Clear Sky Science · ru
Микророботы из МОФ в форме шестеренки для механотрансдукции микроворсинок одной клетки
Крошечные шестерёнки, которые взаимодействуют с одной клеткой
Каждая клетка в вашем теле постоянно ощущает и реагирует на механические силы: от потока крови в артериях до омывающей жидкости в почках. Но до сих пор учёные не могли аккуратно докоснуться до одной клетки и мягко потянуть за её мельчайшие поверхностные структуры, чтобы увидеть, как она точно реагирует. В этом исследовании представлены крошечные микророботы в форме шестерёнки, которые могут подкатиться к отдельной клетке, захватить её микроскопические «пальчики» — микроворсинки, и с высокой точностью тянуть за них, открывая новые возможности для изучения болезней и доставки лекарств прямо в отдельные клетки.
Почему важны поверхностные «пальчики» клетки
Поверхности клеток не гладкие. Многие важные клетки, включая клетки почек, кишечника и иммунные клетки, покрыты густыми «лесами» волосоподобных выступов — микроворсинками. Эти крошечные «пальчики» служат не только для всасывания веществ; они также действуют как чувствительные антенны, преобразующие механические воздействия в биохимические сигналы внутри клетки — процесс, известный как механотрансдукция. Традиционные методы изучения этих сил — например, обдув клеток потоком жидкости или сжатие их в узких каналах — воздействуют на большие площади и могут искажать клетки неестественным образом. Авторы статьи поставили цель создать миниатюрный инструмент, который мог бы механически стимулировать только микроворсинки выбранной отдельной клетки, не захватывая и не зажимая саму клетку.
Создание клеткоразмерных роботов в форме шестерёнки
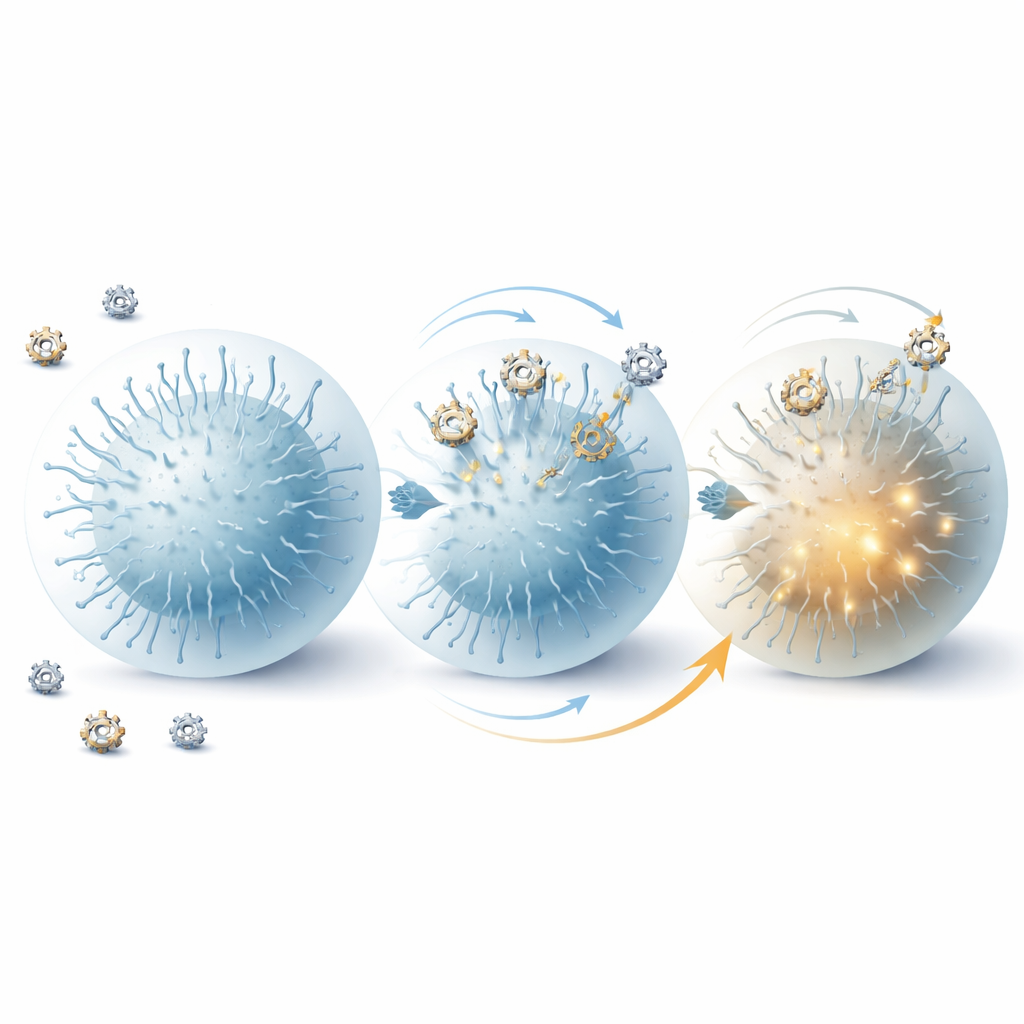
Команда спроектировала микророботов из металло‑органических каркасов (МОФ), пористых кристаллических материалов, способных удерживать молекулы как губка. Тщательно выращивая один МОФ на углах другого, они получили частицы с четырёхлопастной, шестерёнкообразной формой. Затем их покрыли тонкими слоями никеля, чтобы сделать магнитными, и золотом для биосовместимости. Результат, названный «MOFbot», имеет размер около микрона — примерно как бактерия. Под вращающимся магнитным полем MOFbot либо вращаются на месте, либо перекатываются по поверхностям, даже перелезая через микронные ступени, с которыми не справляются простые сферические роботы. Компьютерные моделирования показали, что острые «зубцы» шестерёнки фокусируют поток жидкости и механическое напряжение в углах, делая их идеальными для захвата мягких клеточных структур.
Захват микроворсинок и натягивание клетки
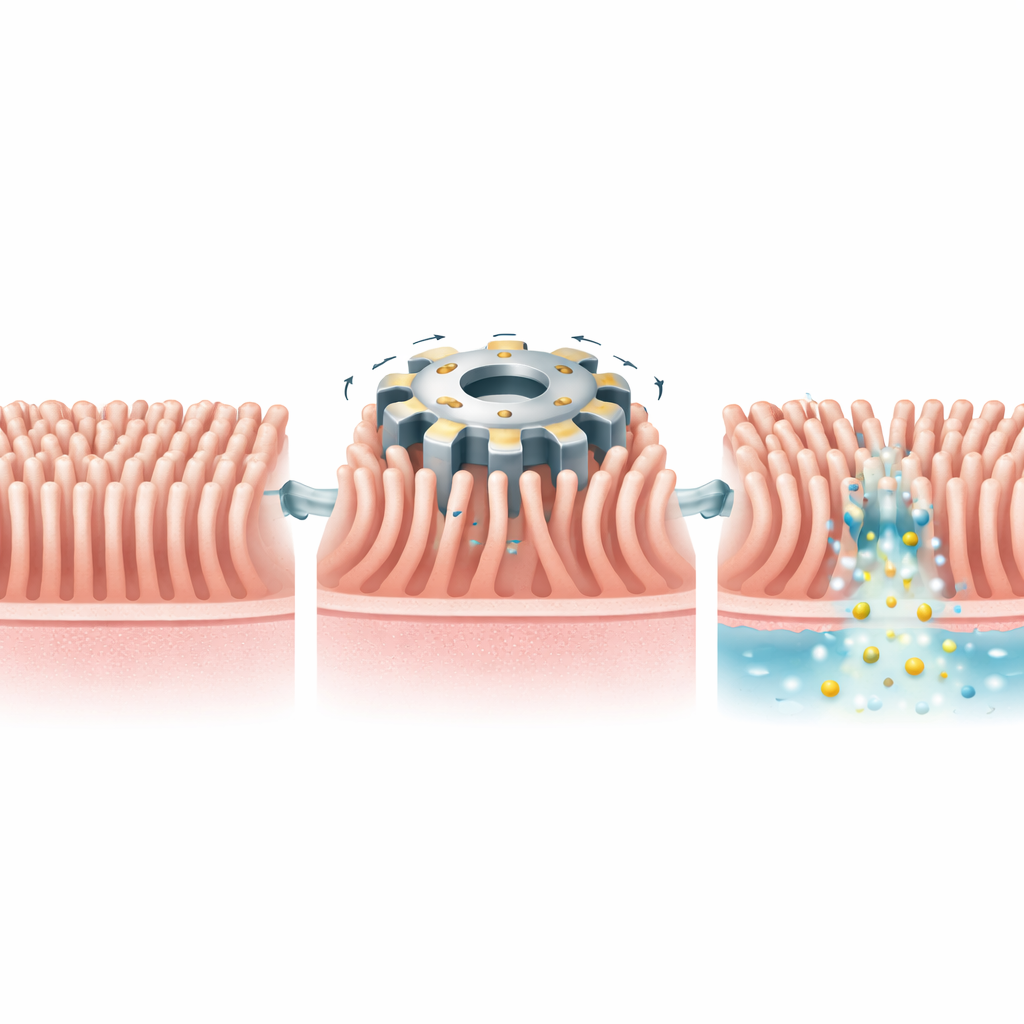
Когда исследователи приводили MOFbot в контакт с культивированными человеческими раковыми клетками, высокоразрешающая визуализация показала, что вращающиеся роботы в форме шестерёнок переплетаются с микроворсинками клеток, в то время как неподвижные частицы или гладкие шарики этого не делали. С помощью мягких гелевых подложек, содержащих флуоресцентные шарики, они измеряли, насколько клетки тянут за окружающую среду при вращении MOFbot по сравнению со статичными. Движущиеся шестерёнки увеличивали локальные тракционные силы примерно в пятнадцать раз, и этот эффект в значительной степени исчезал при разрушении микроворсинок или внутреннего актинового каркаса клеток. Отдельный молекулярный датчик напряжения внутри клеток показал, что вращение MOFbot передаёт силы глубоко в сеть актина, и эти силы исчезали при удалении микроворсинок. В совокупности эти эксперименты указывают на микроворсинки как на критические проводники, которые направляют внешнее механическое натяжение внутрь клетки.
Активация внутренних сигналов и вскрытие мембраны
Механическое натяжение микроворсинок делало не только деформацию поверхности клетки. Оно запускало классические механочувствительные пути внутри клетки. Генетически кодированный индикатор кальция показал, что стимуляция MOFbot вызывает сильный подъём уровня кальция, важного сигнального мессенджера, который в значительной степени блокировался при ингибировании двух известных каналов, открывающихся под действием силы, PIEZO1 и TRPV4. Одновременно значительно возрастало содержание фосфорилированной формы фокальной адгезионной киназы (FAK) — белка, передающего механическую информацию от наружного каркаса клетки. Моделирование и эксперименты с поглощением красителей показали, что повторяющееся шестернёкообразное вращение около микроворсинок может ослаблять упакованность липидов мембраны и временно повышать её проницаемость. Под магнитным управлением MOFbot, несущие флуоресцентные красители или химиотерапевтический препарат доксорубицин, доставляли значительно больше груза в целевые клетки, чем неподвижные частицы, при этом большинство клеток оставалось живыми и неповреждёнными.
Что это может значить для будущих терапий
Проще говоря, эта работа показывает, что тщательно сконструированные микророботы способны подкатиться к отдельной клетке, зацепиться за её мельчайшие поверхностные особенности и «потрясти дверную ручку» настолько, чтобы одновременно исследовать и влиять на реакцию клетки. Доказав, что микроворсинки действуют как механические усилители, связывающие внешние силы с кальциевыми сигналами, структурными белками и проницаемостью мембраны, исследование открывает новый метод изучения заболеваний, связанных с нарушениями этих поверхностных структур — от кишечных расстройств до метастазирования рака — и намекает на будущие подходы, при которых лекарства не просто доставляются в нужную клетку, но и активно проталкиваются через её мембрану механическими сигналами по требованию.
Цитирование: Liu, X., Wang, Y., Lin, L. et al. Gear-like MOF microrobots for single cell mechanotransduction of microvilli. Nat Commun 17, 3254 (2026). https://doi.org/10.1038/s41467-026-70052-8
Ключевые слова: микророботы, микроворсинки, механотрансдукция, нацеленная доставка лекарств, механика клеток