Clear Sky Science · ja
微小絵歯車状MOFマイクロロボットによる微絨毛の単一細胞機械受容変換
単一細胞に働きかける小さな歯車
体内のすべての細胞は、動脈を流れる血流や腎臓内の液体の動きといった機械的力を常に感知し反応しています。しかしこれまで、研究者が単一の細胞に接近してその最小の表面構造をやさしく引くことで反応を詳細に観察する手段はありませんでした。本研究では、個々の細胞に転がり寄り、微小な表面突起である微絨毛をつかんで精密に引っ張ることができる、歯車状の微小マイクロロボットを紹介します。これにより、疾患の研究や薬剤を単一細胞へ直接届ける新たな方法が開けます。
なぜ細胞表面の指状突起が重要か
細胞表面は平滑ではありません。腎臓、消化管、免疫系など多くの重要な細胞は、微絨毛と呼ばれる毛のような突起が密に生えた“森”に覆われています。これらの小さな指状突起は栄養吸収だけでなく、外部の力を細胞内の生化学信号に変換する感度の高いアンテナとしても機能し、この過程を機械受容変換と呼びます。従来の力の研究法―例えば細胞上を液体で押し流す、あるいは狭いチャネルに押し込むといった方法―は広い領域に作用し、細胞を非自然にゆがめてしまうことがあります。著者らは、細胞自体を締め付けたり閉じ込めたりすることなく、標的とした単一細胞の微絨毛だけを機械的に刺激できるミニチュアツールの開発を目指しました。
歯車状の細胞スケールロボットの構築
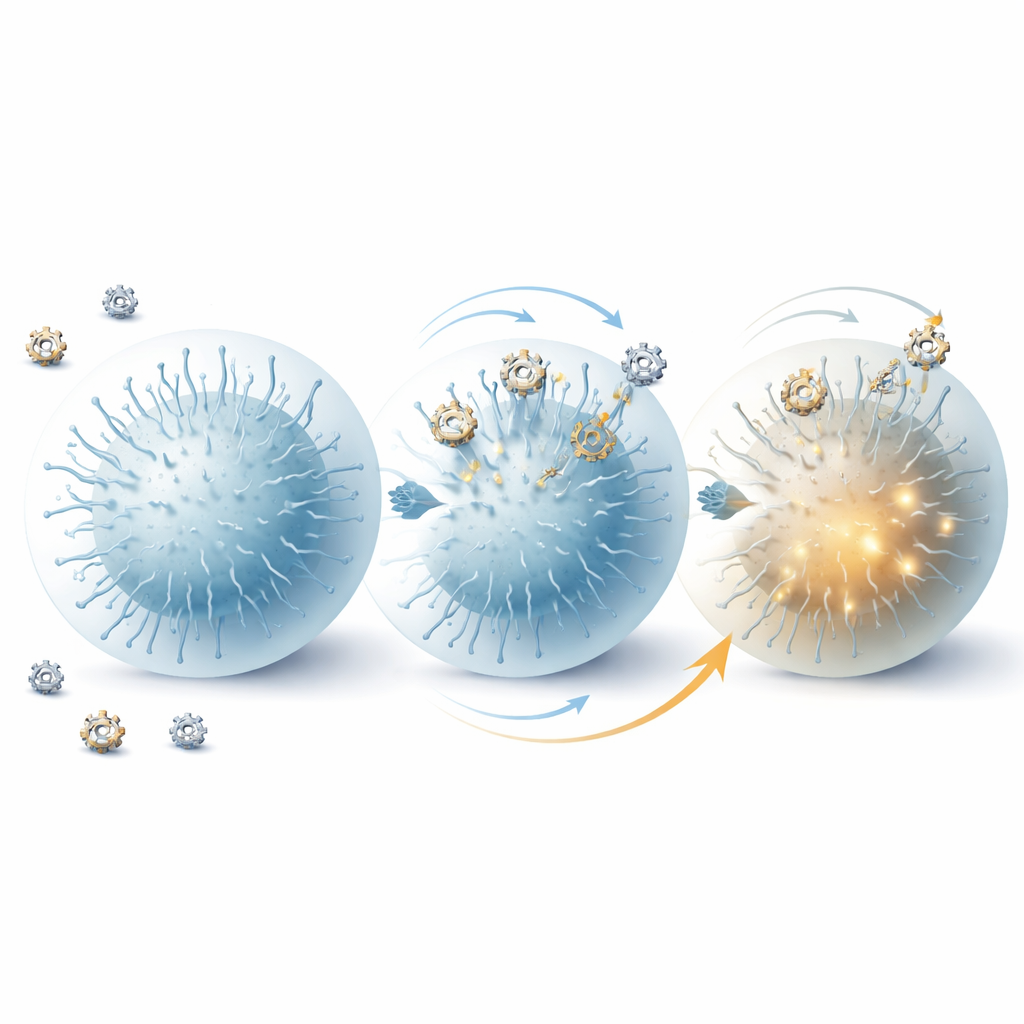
研究チームは、分子をスポンジのように保持できる多孔質結晶材料である金属有機構造体(MOF)からマイクロロボットを設計しました。一つのMOFを別のMOFの隅に注意深く成長させることで、四葉形の歯車状粒子を作製しました。これらに薄いニッケル層を被覆して磁性を付与し、金で被覆して生体親和性を持たせました。得られた「MOFボット」は直径約1マイクロメートルで、ほぼ細菌と同じ大きさです。回転磁場下では、MOFボットはその場で回転するか、表面を転がって移動することができ、単純な球形ロボットでは越えられないマイクロスケールの段差を登ることさえできます。計算機シミュレーションは、歯車の鋭い“歯”が流体の流れと機械的応力を角に集中させ、柔らかい細胞構造をつかむのに理想的であることを示しました。
微絨毛をつかんで細胞を引く
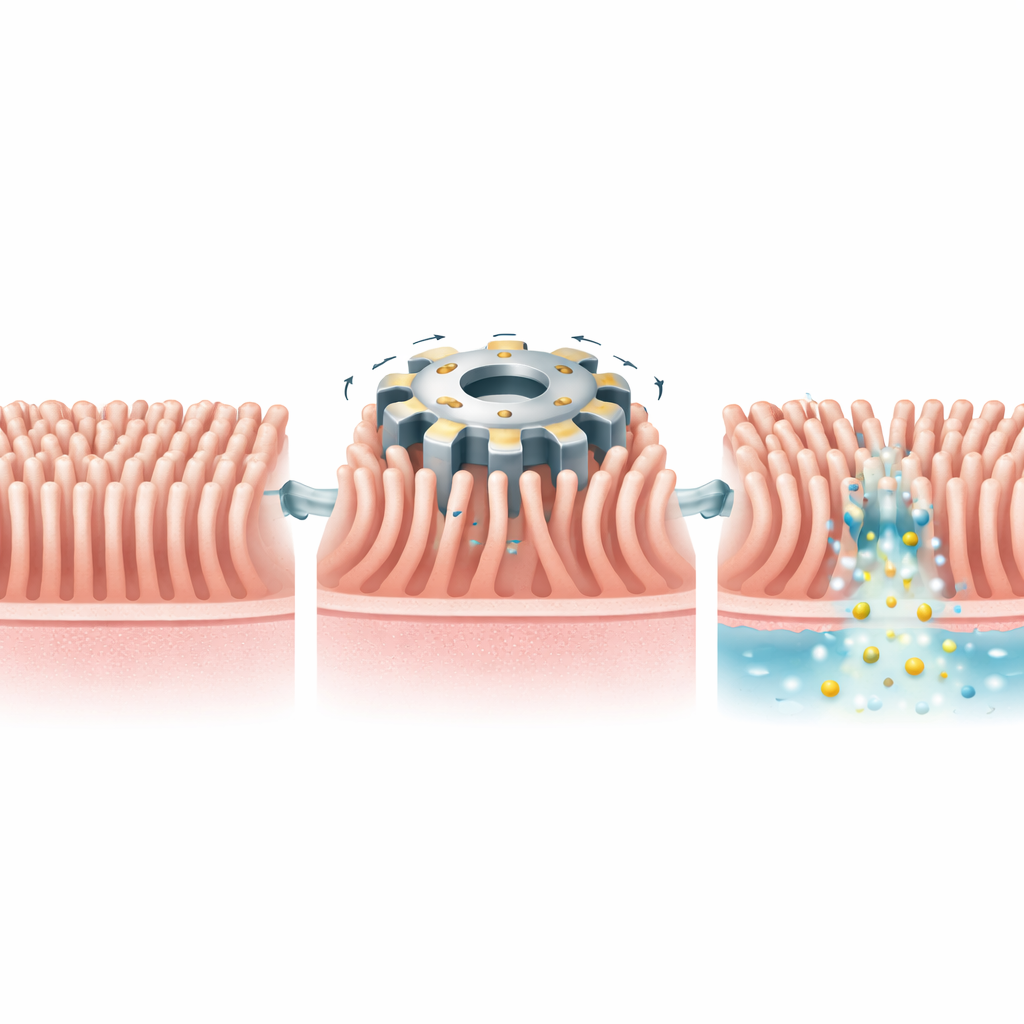
研究者らが培養したヒトがん細胞にMOFボットを接触させると、高解像度イメージングにより回転する歯車状ボットが細胞の微絨毛と絡み合う様子が明らかになりました。一方、動かないボットや滑らかな球形はこのような絡みを示しませんでした。蛍光ビーズをまいた柔らかいゲル基材を用いて、MOFボットが回転しているときと静止しているときの細胞が周囲にかける力を測定したところ、回転する歯車は局所的な牽引力を約15倍に増大させ、この効果は微絨毛や細胞内のアクチン骨格を破壊するとほとんど消失しました。細胞内に組み込んだ分子張力センサーでも、MOFボットの回転がアクチンネットワークの深部まで力を伝えていることが示され、微絨毛を除去するとこれらの力は消えました。これらの実験は、外部からの機械的な引きが細胞内部へと流れ込む経路として微絨毛が重要な導管であることを示します。
内側のシグナルをオンにし膜を開く
微絨毛への機械的な引きは、単に細胞表面を曲げるだけに留まりませんでした。それは細胞内の古典的な機械感受性経路を作動させました。遺伝子コード化されたカルシウム指示薬により、MOFボット刺激がカルシウム濃度を強く上昇させることが明らかになり、この上昇は力で開くとして知られるイオンチャネルPIEZO1およびTRPV4を阻害すると大部分が抑えられました。同時に、細胞外の足場から機械情報を中継するタンパク質である焦点接着キナーゼ(FAK)のリン酸化型の濃度も有意に上昇しました。シミュレーションと染料取り込み実験は、微絨毛での繰り返し回転が膜脂質の配列を緩め、一時的に膜透過性を高めることを示しました。磁気制御下で、蛍光色素や抗がん剤ドキソルビシンを搭載したMOFボットは、静止したボットよりも標的細胞へはるかに多くの薬剤を届け、かつ多くの細胞を生存したまま保ちました。
将来の治療への示唆
簡潔に言えば、本研究は緻密に設計されたマイクロロボットが単一細胞に転がり寄り、その最小の表面特徴にしっかりと取り付き、「ドアノブを揺らす」程度の力で細胞の応答を探り、また影響を与え得ることを示しています。微絨毛が外部力をカルシウムシグナル、構造タンパク質、膜透過性へと結びつける機械的増幅器として働くことを実証したことで、腸障害からがん転移に至る表面構造の異常が関わる病態の研究に新たな道を開き、薬を正しい細胞に届けるだけでなく、要求に応じて機械的合図で能動的に膜を越えて押し込む将来の治療の可能性を示唆します。
引用: Liu, X., Wang, Y., Lin, L. et al. Gear-like MOF microrobots for single cell mechanotransduction of microvilli. Nat Commun 17, 3254 (2026). https://doi.org/10.1038/s41467-026-70052-8
キーワード: マイクロロボット, 微絨毛, 機械受容変換, 標的薬物送達, 細胞力学