Clear Sky Science · pt
Seleção de parâmetros incompatíveis e análise de sensibilidade a erros de um redutor tipo worm TEC easy-off
Por que os dentes das engrenagens importam para máquinas suaves
Sempre que um motor movimenta discretamente um braço robótico, um elevador ou uma correia de fábrica, conjuntos de engrenagens ocultos fazem o trabalho pesado de reduzir velocidade e aumentar torque. Uma forma compacta de obter reduções de velocidade muito grandes é usar uma engrenagem em formato de parafuso chamada redutor worm. Mas os redutores worm tradicionais de alto desempenho são frágeis: pequenos erros de fabricação ou montagem podem concentrar forças nas bordas dos dentes, levando a ruído, vibração e falha prematura. Este estudo explora uma nova maneira de moldar e alinhar os dentes em um redutor toroidal envolvente cônico (TEC) “easy-off” moderno, de modo que ele permaneça eficiente e muito menos sensível a essas imperfeições.
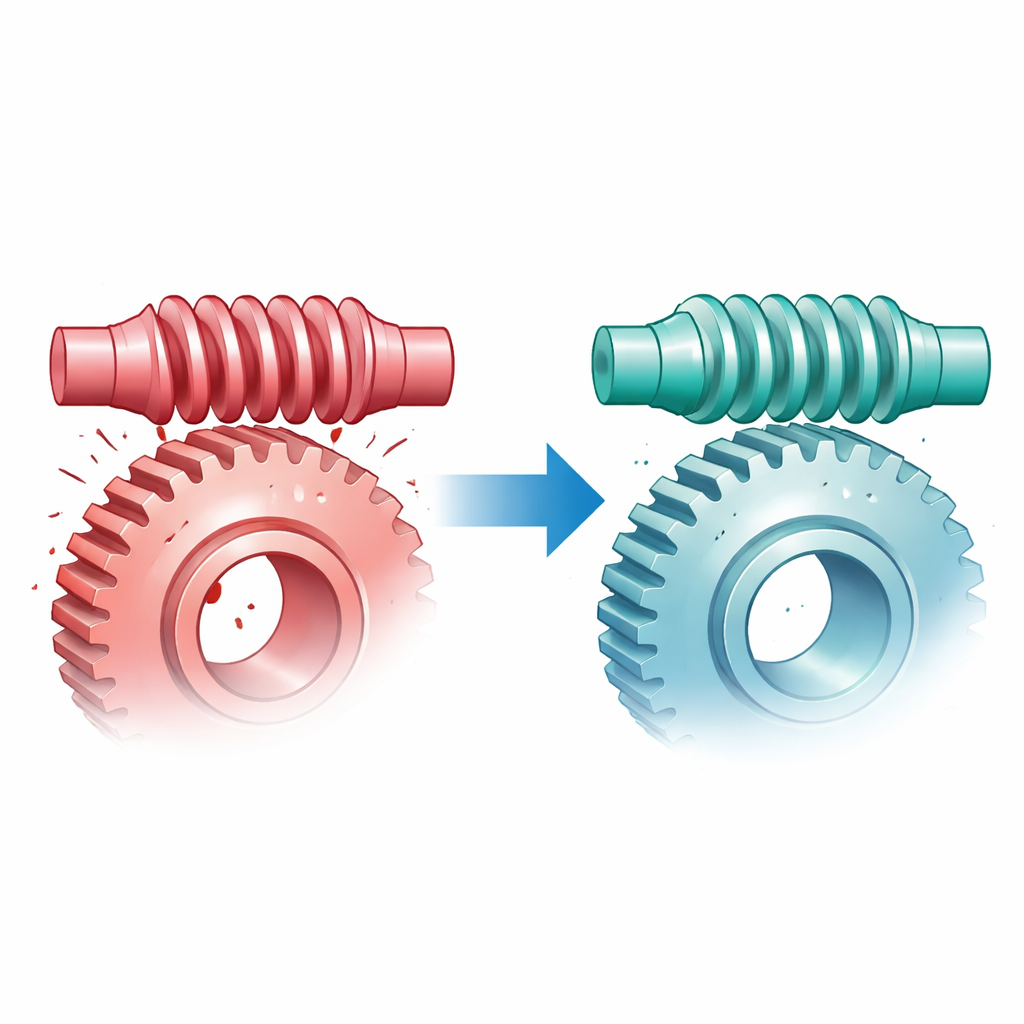
Do contato em linha frágil ao contato pontual tolerante
Os redutores TEC convencionais são projetados para que as superfícies dos dentes entrem em contato ao longo de linhas estreitas. Em teoria esse “contato em linha” distribui cargas de forma eficiente, mas na prática mesmo pequenas variações de ângulo, distância ou forma podem deslocar o contato para uma borda, elevando fortemente tensão e desgaste. Engenheiros propuseram um remédio chamado modificação incompatível: em vez de exigir que as duas superfícies dos dentes coincidam perfeitamente em todos os pontos, o projetista introduz intencionalmente uma leve incompatibilidade. Isso converte o contato em linha em uma série de pequenos patches de contato que se comportam como pontos. Esses contatos pontuais acrescentam liberdade para que os dentes se ajustem quando erros estão presentes, ajudando o conjunto a manter bom desempenho mesmo quando as condições do mundo real são menos que perfeitas.
Construindo um quadro matemático detalhado do contato entre dentes
Os autores constroem um modelo abrangente de geometria e movimento do redutor TEC easy-off, incluindo explicitamente erros de fabricação e montagem, como pequenos deslocamentos na distância entre centros, ângulo de eixo e posição axial de montagem. Usando ferramentas da teoria do engrenamento, eles formulam as equações que descrevem onde e como os dentes do worm e da engrenagem podem tocar em qualquer instante. Essas equações são altamente não lineares e envolvem muitas variáveis acopladas, tornando-as difíceis de resolver diretamente. Ainda assim, encontrar pontos precisos de “contato instantâneo” nas superfícies dos dentes é essencial para prever a capacidade de carga, a suavidade do movimento e quão sensível o sistema é a diferentes tipos de erros.
Busca inteligente por pontos de contato
Para domar essa complexidade, o artigo introduz um método de Busca Adaptativa por Extremos (AES). Em vez de adivinhar bons valores iniciais por tentativa e erro, a abordagem AES trata o conjunto de equações de contato dos dentes como uma única função que se anula somente quando todas as condições são satisfeitas ao mesmo tempo. O algoritmo explora o espaço de parâmetros possíveis em pequenas vizinhanças que encolhem de forma adaptativa, avançando sempre em direção a combinações que tornam essa função menor. Em testes numéricos para um redutor TEC representativo, o AES encontra pontos iniciais de contato precisos de forma notavelmente mais rápida — cerca de um quarto menos tempo de computação — do que uma técnica de dupla malha usada anteriormente. Esses pontos iniciais melhores permitem que solucionadores numéricos padrão convirjam de maneira confiável, possibilitando o mapeamento detalhado das trilhas de contato nos dentes e dos erros de movimento associados.
Como escolhas de projeto e erros moldam o desempenho
Munidos desse modelo e solucionador, os autores variam sistematicamente parâmetros-chave de modificação incompatível — como a razão de avanço do processo, distância entre centros, ângulo do eixo, posição da fresagem e geometria da ferramenta de retífica — e observam como os padrões de patches de contato, o tamanho das regiões elípticas locais e o erro rotacional da engrenagem worm respondem. Um projeto de incompatibilidade bem escolhido produz trilhas de contato longas que cobrem a maior parte da largura e altura do dente, com variações parabólicas de erro rotacional em “lento‑rápido‑lento” que favorecem baixa vibração. Entre os diversos ajustes possíveis, o ângulo do eixo destaca-se como o mais crítico: pequenas variações aqui podem encurtar fortemente as regiões de contato e aumentar os erros de movimento, especialmente em um dos lados dos dentes. O estudo também revela um trade-off importante: se as superfícies dos dentes forem tornadas muito semelhantes — de modo que as elipses de contato fiquem muito alongadas e se aproximem de uma linha — o redutor recupera boa distribuição de carga, mas volta a se tornar muito mais sensível a pequenos erros.
O que isso significa para máquinas reais
Para engenheiros que buscam transmissões silenciosas, duráveis e de alta relação, os resultados oferecem tanto segurança quanto orientação. Um par de worm TEC easy-off cuidadosamente incompatibilizado pode ser surpreendentemente tolerante a erros de montagem realistas, mantendo contato pontual estável e rotação suave mesmo quando distâncias e ângulos estão ligeiramente desalinhados. O método de Busca Adaptativa por Extremos fornece um meio prático de projetar e avaliar esses redutores em detalhe antes de cortar qualquer metal. Ao mesmo tempo, o trabalho alerta que reduzir demais as incompatibilidades em busca do contato ideal pode sair pela culatra, tornando o sistema frágil novamente. Em suma, o artigo mostra como um toque de imperfeição deliberada na geometria dos dentes pode tornar os redutores worm componentes mais robustos e confiáveis em sistemas mecânicos exigentes.
Citação: Huai, C., Sun, S., Gai, J. et al. Mismatched parameters selection and error sensitivity analysis of easy-off TEC worm drive. Sci Rep 16, 10335 (2026). https://doi.org/10.1038/s41598-026-41523-1
Palavras-chave: transmissão por parafuso sem-fim, contato entre dentes de engrenagem, sensibilidade a erros, transmissão mecânica, projeto de engrenagens computacional