Clear Sky Science · nl
Fysisch-gebaseerde modellering en identificatie van wrijvingsparameters van een proportionele schuifklep
Waarom een klein schuivend onderdeel ertoe doet
Moderne machines, van graafmachines tot fabriekrobots, vertrouwen op hydraulische kleppen om zware lasten met vloeiende, nauwkeurige bewegingen te verplaatsen. In het hart van veel van deze kleppen bevindt zich een klein schuivend onderdeel, de schuifkern, dat snel en voorspelbaar op elektrische commando's moet reageren. Dit artikel onderzoekt hoe het gedrag van zo’n klep in detail te modelleren, met speciale aandacht voor wrijving binnen de klep, zodat ingenieurs veiligere en efficiëntere hydraulische systemen kunnen ontwerpen.
De bewegende kern van een hydraulische regelaar
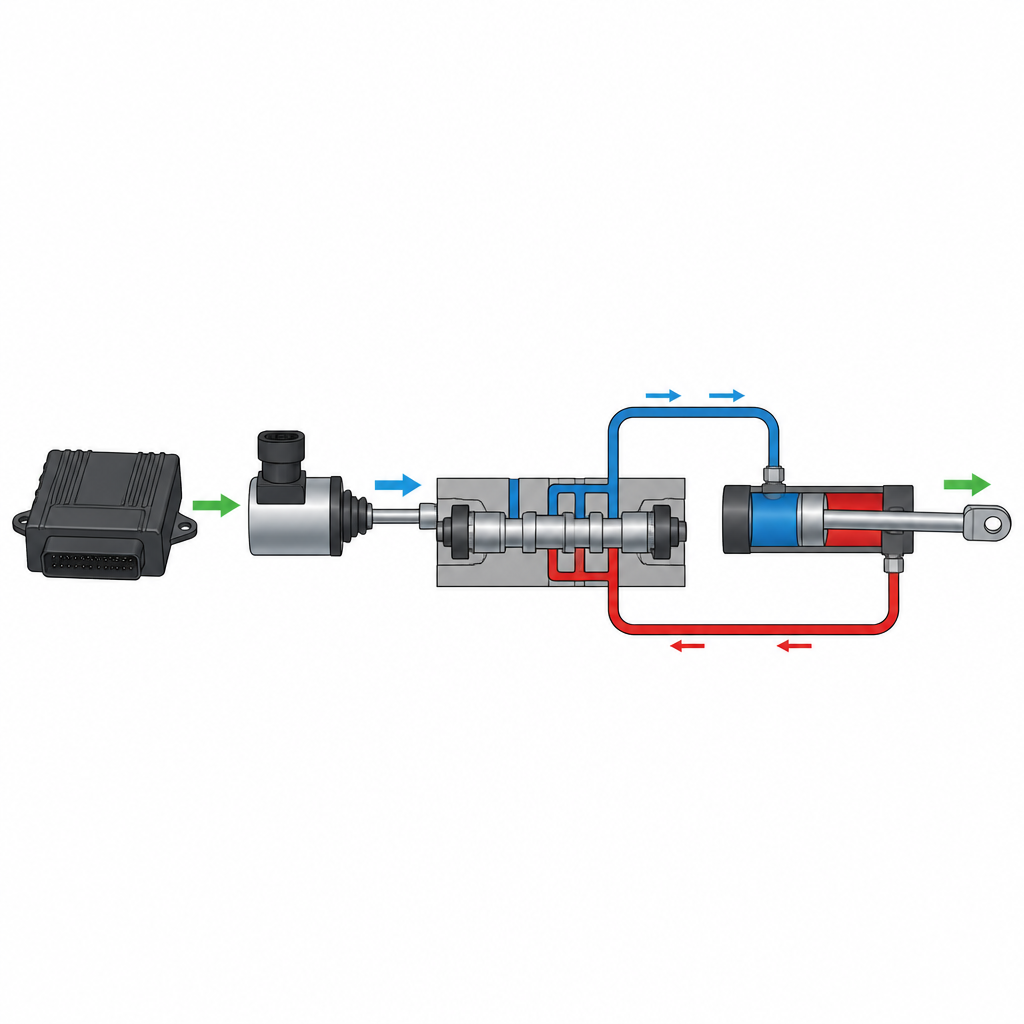
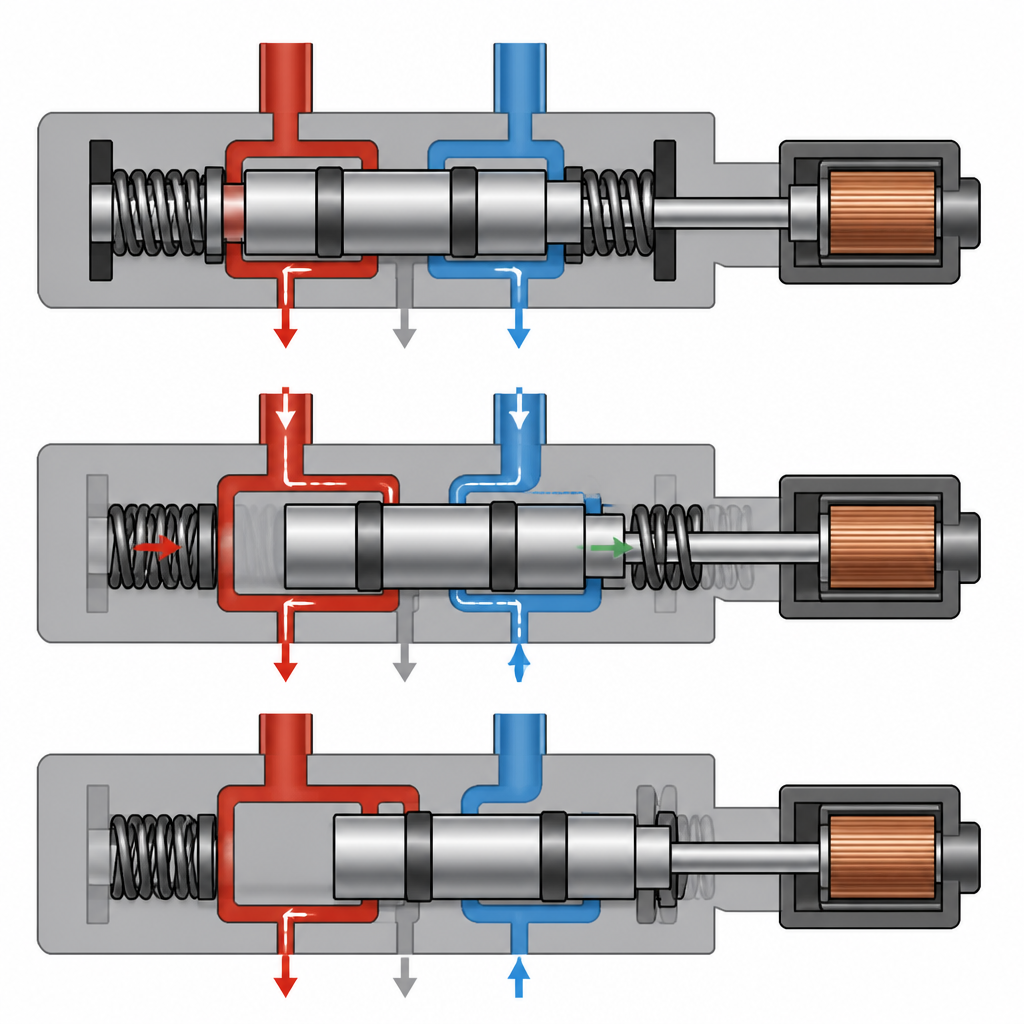
De studie beschouwt een veelgebruikt industrieel onderdeel dat bekendstaat als een proportionele schuifklep. Deze inrichting stuurt onder druk staande olie naar een hydraulische cilinder of motor en kan de stroming continu variëren in plaats van deze alleen aan of uit te zetten. De auteurs analyseren een commerciële klep die drie hoofdcomponenten combineert: een gietijzeren huis met een nauw passend schuifstempel, een lineaire elektromotor die de schuif heen en weer drukt, en ingebouwde elektronica die de stand van de schuif aanstuurt en meet. Twee tegenwerkende veren centreren de schuif wanneer de voeding wordt uitgeschakeld, terwijl een inductieve sensor zijn exacte positie aan een regelunit rapporteert.
Een model opbouwen uit reële krachten
In plaats van de klep als een simpele black box met een ingang en uitgang te behandelen, construeren de onderzoekers een fysisch gebaseerd model dat de afzonderlijke krachten op de schuif volgt. Daartoe behoren de aandrijving van de lineaire motor, de herstellende kracht van de veren, de traagheid van de bewegende onderdelen, krachten van de stromende olie en wrijving tussen schuif en huis. Elk bijdrager wordt bepaald uit gerichte metingen: statische tests van motorkracht bij verschillende stromen en posities, compressietests van de veren, wegen van de bewegende assemblage en eerdere studies van stromingskrachten. Al deze ingrediënten worden samengevoegd in één bewegingsvergelijking die beschrijft hoe de schuif accelereert, vertraagt en tot rust komt als reactie op een stuurcommando.
Het raadsel van interne wrijving kraken
Wrijving blijkt de meest hardnekkige invloed te zijn, omdat deze niet rechtstreeks kan worden gemeten terwijl de klep in bedrijf is. Het team gebruikt daarom een indirecte strategie. Ze laten de klep draaien op een speciaal hydraulisch testbank en registreren hoe de schuif reageert op plotselinge stapveranderingen en op sinussignalen over een reeks frequenties. Met olie aanwezig maar aanvankelijk niet stromend, stemmen ze de parameters van een geavanceerde wrijvingsbeschrijving, bekend als het LuGre-model, af totdat simulaties overeenkomen met de gemeten beweging. Dit model vangt hoe stilstandswrijving moet worden overwonnen om beweging te starten, hoe wrijving bij lage snelheden afneemt en hoe een viscose component met de snelheid toeneemt. Ze herhalen de procedure vervolgens met olie in stroming bij verschillende drukken en met en zonder positieregeling, waarmee ze aantonen dat het wrijvingsniveau verandert wanneer stroming en druk het contact tussen schuif en huis beïnvloeden.
Het model toetsen aan de werkelijkheid
Eens gekalibreerd wordt het fysisch gebaseerde model gebruikt om te voorspellen hoe de klep zich in verschillende situaties gedraagt. De auteurs vergelijken gesimuleerde en gemeten stapresponsen en noteren overshoot, stijgtijd en inslingertijd voor verschillende commandosnelheden, zowel met als zonder terugkoppeling. Ze vergelijken ook frequentieresponsen tot 100 hertz, waarbij ze bekijken hoe amplitude en timing van de schuifbeweging veranderen met de excitatiefrequentie. Over het grootste deel van het geteste bereik volgt het model de echte klep nauwkeurig, inclusief subtiele resonanties en het remmende effect van hogere inlaatdrukken. Waar afwijkingen optreden, hoofdzakelijk bij hoge commandoniveaus en onder sterke stroming, wijzen ze op aanvullende niet-lineaire effecten en hydrodynamische details die nog niet volledig zijn vastgelegd.
Waarom dit gedetailleerde beeld nuttig is
Om de praktische waarde van hun aanpak te tonen, contrasteren de auteurs hun fysisch gebaseerde model met een eenvoudiger lineair model dat vaak in regelontwerp wordt gebruikt. Terwijl de eenvoudige versie enkele metingen onder vaste omstandigheden kan nabootsen, moet deze telkens worden bijgesteld wanneer de bedrijfsomstandigheden veranderen. Het nieuwe model daarentegen laat ingenieurs fysieke parameters zoals veersteifheid, bewegende massa of wrijvingsinstellingen direct aanpassen en toch realistische voorspellingen krijgen. Voor machinebouwers betekent dit een betrouwbaardere manier om regelstrategieën en klepontwerpen op de computer te testen voordat hardware wordt gebouwd, en een duidelijker inzicht in hoe interne wrijving en vloeistofkrachten de soepelheid en snelheid van hydraulische beweging bepalen.
Bronvermelding: Ledvoň, M., Hružík, L., Bureček, A. et al. Physics-based modeling and friction parameter identification of a proportional spool valve. Sci Rep 16, 15238 (2026). https://doi.org/10.1038/s41598-026-46361-9
Trefwoorden: proportionele schuifklep, hydraulische regeling, wrijvingsmodellering, dynamische respons, fysisch gebaseerde simulatie