Clear Sky Science · nl
Een slim monoculair visiemetrologiesysteem op basis van computer voor de sprong vanuit stilstand
Waarom springsafstand er toe doet
De sprong vanuit stilstand is een van de eenvoudigste manieren waarop scholen wereldwijd de fitheid van leerlingen testen: op een lijn gaan staan, zo ver mogelijk springen en de afstand meten. Maar op drukke schoolpleinen kan deze ogenschijnlijk eenvoudige test rommelig worden. Leraren bukken nog steeds met meetlinten, beslissingen kunnen worden betwist en het registreren van duizenden sprongen is traag en vermoeiend. Deze studie introduceert een camerasysteem dat automatisch en nauwkeurig de sprongafstand uit gewone video kan meten, en belooft snellere, objectievere tests zonder dure gespecialiseerde hardware.
Van meetlint naar slimme camera
De hedendaagse geautomatiseerde hulpmiddelen voor verspringen vertrouwen vaak op ultrasone sensoren, drukmatten of lichtstralen over het zand. Hoewel effectief, zijn ze duur om te installeren, gevoelig voor weersomstandigheden en moeilijk te onderhouden voor grootschalig schoolgebruik. De auteurs benaderen de taak in plaats daarvan als een zichtprobleem: als een enkele camera zowel de voeten van de atleet als de springmat kan zien, zou software moeten kunnen berekenen hoe ver die persoon heeft gereisd. Ze ontwerpen een complete pijplijn die rauwe video in real time omzet in een uiteindelijke afstandswaarde, met een mix van moderne computerzichttechnieken en zorgvuldige geometrische redenering.

Hoe het systeem een sprong ziet
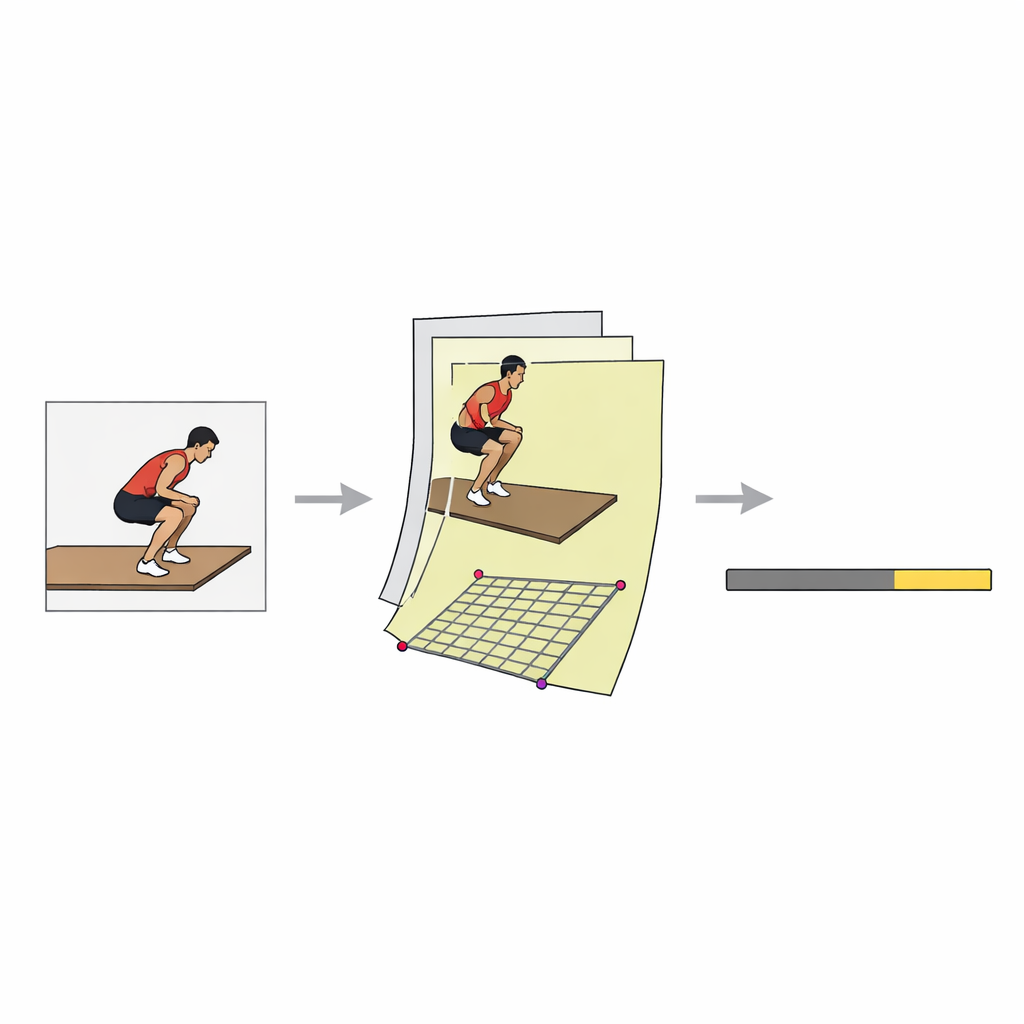
Het proces begint met een hogesnelheidscamera die een paar meter naast de springmat staat en scherpe video met 240 frames per seconde vastlegt. Software splitst deze video eerst in individuele frames en gebruikt een kant-en-klare detector om snel te vinden wanneer een atleet het beeld binnenkomt en verlaat. Binnen dit venster zoekt het naar het moment waarop de hiel het hoogst in de afbeelding staat (de piek van de sprong) en daarna naar latere frames waarin de hielpositie ophoudt te veranderen, wat duidt op een stabiele landing. Deze automatische selectie van sleutelframes zorgt ervoor dat het systeem geen tijd verliest met het analyseren van elk afzonderlijk frame en voorkomt dat het in de war raakt door gedeeltelijke beelden wanneer de atleet slechts half in beeld is.
Matten, hielen en de echte afstand vinden
Zodra het landingsframe is geïdentificeerd, neemt een aangepast visiemodel genaamd FastNetSeg het over. Dit lichtgewicht netwerk combineert twee ideeën: een Transformer-tak die de algemene lay-out van de scène vastlegt en een compacte convolutionele tak die zich richt op lokale details. Samen kleuren ze de pixels in die bij de atleet horen en die bij de springmat. Vanuit de matmasker volgt een algoritme de buitenrand, effent kleine onregelmatigheden en distilleert het tot vier betrouwbare hoekpunten. Vanuit het atleetmasker bekijkt een ander algoritme de contour van het linkeronderlichaamsgebied, filtert irrelevante gebieden weg en lokaliseert de hiel met behulp van kromming—in wezen door de scherpe bocht te vinden waar de achterkant van de voet de grond raakt. Deze paar sleutelpunten leveren de ruwe ingrediënten voor de meting.
Pixels omzetten in centimeters
Aangezien de camera de mat onder een hoek bekijkt, komen afstanden in de afbeelding niet rechtstreeks overeen met echte centimeters: een pixel nabij de verre rand van de mat kan meer fysieke afstand vertegenwoordigen dan een pixel dicht bij de camera. Om dit te overwinnen leert het systeem een "mapping" van afbeeldingscoördinaten naar het platte oppervlak van de mat, met behulp van een standaard geometrisch hulpmiddel genaamd perspectieftransformatie. Met de bekende echte lengte en breedte van de mat berekent de software hoe elk zichtbaar punt—vooral de hiel—zou worden geplaatst op een bovenaanzicht van de grond. Vervolgens past het een extra correctiestap toe op basis van een eenvoudige polynomiale kromme, die wordt gefit aan kalibratiesprongen om de kleine systematische fouten te verminderen die aan de randen van het gezichtsveld van de camera blijven bestaan.
Hoe goed het in de praktijk werkt
Om het systeem onder realistische omstandigheden te testen, bouwden de onderzoekers een speciale dataset: 1.200 sprongen van 200 universiteitsstudenten, gefilmd buiten op verschillende tijdstippen van de dag en bij wisselend weer. Menselijke annotatoren maakten pixelnauwkeurige omtrekken van atleten en matten om het model te trainen en te evalueren. Op moderne maar algemeen beschikbare GPU-hardware verwerkt het complete systeem ongeveer 23 frames per seconde, snel genoeg voor live gebruik tijdens schooltests. Cruciaal is dat wanneer de afstandsschattingen worden vergeleken met zorgvuldige lintmetingen, de gemiddelde fout slechts ongeveer 0,71 centimeter bedraagt—minder dan de breedte van een vinger. Het weglaten van een van de sleutelmodules, zoals de filter voor onvolledige atleten, de single-view mapping of de precieze hielbepaling, laat de nauwkeurigheid scherp dalen, wat het belang van het volledige ontwerp benadrukt.
Een duidelijkere, eerlijkere springtest
In eenvoudige bewoordingen toont dit werk aan dat een enkele slimme camera handmatige meetlinten en dure sensorsystemen voor de sprong vanuit stilstand kan vervangen zonder aan nauwkeurigheid in te boeten. Door snelle videoanalyse te combineren met precieze afbakening van springer en mat, zorgvuldige geometrische conversie van beeld naar grond en een laatste fout‑verzachtende stap, levert het systeem centimeterprecisie in real time. Met gedeelde code en kalibratietools zouden scholen en sportprogramma's deze aanpak breed kunnen inzetten, waardoor fitheidstests sneller, eerlijker en minder afhankelijk van menselijke beoordeling worden.
Bronvermelding: Kuang, G., Li, S., Liu, Y. et al. A smart monocular vision metrology system based on computer for standing long jump. Sci Rep 16, 14611 (2026). https://doi.org/10.1038/s41598-026-44523-3
Trefwoorden: sprong vanuit stilstand, computerzicht, sportmetingen, deep learning, fitheidstesten