Clear Sky Science · ja
ロボット外骨格を介した運動学習の事例研究としてのバイオリン教育における触覚フィードバック
バイオリン習得を助ける「手」
バイオリンの習得は手や腕、耳に負担がかかることで知られています。初心者はまっすぐに弓を弦に引くために数十の細かい動きを協調させなければなりません。本研究は単純だが興味深い問いを立てます:腕をそっと導くウェアラブルなロボット「スリーブ」は、そのような動きをより速く、より正確に学ぶ助けになるだろうか?研究者たちはモーション追跡、専門家による評価、利用者の体験を組み合わせ、触覚フィードバック――実際に感じられる物理的なガイダンス――が初期のバイオリンレッスンをより効果的にできるかを検証しました。

弓を導くロボットスリーブ
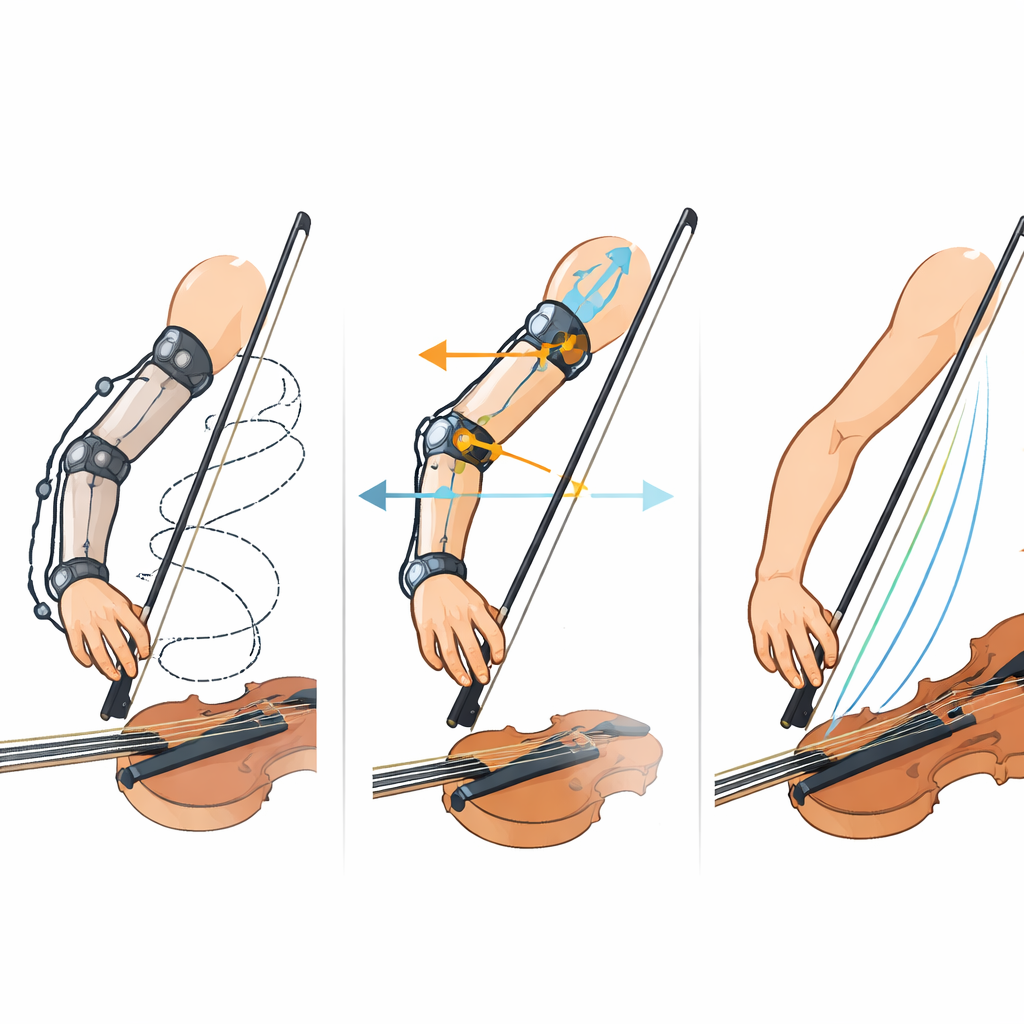
チームは演奏者の弓を持つ腕に装着する上腕用外骨格を開発しました。肩と肘にモータ駆動の関節があり、背中や前腕には軽い構造支持が付いています。ニュートラル設定では単に演奏者と一緒に動き、動作を記録します。ガイダンスモードでは、プレーヤーの腕の位置をプロのバイオリニストの事前記録された「理想的」な弓の軌跡と比較し、ばねのような力で腕をその軌道へ穏やかに押したり引いたりします。外骨格はモーションキャプチャスーツとビデオシステムと連携しており、学習者は教師の動きを見て真似すると同時に、正しい動きがどのように感じられるべきかを触覚で体感できます。
技術の実力を試す
この装置が実際に学習を改善するかを調べるために、研究者はバイオリン初心者の成人男性24名を募集しました。全員が同じ20分のプロ教師によるビデオレッスンを視聴し、3つの単純な弓の練習を行いました。参加者の半分は外骨格を装着し、レッスン中にリアルタイムの触覚ガイダンスを受けました;残りは音声と映像のみを使用しました。全員がトレーニング前に「ベースライン」演奏、トレーニング後にガイダンスなしの「リコール」演奏を行いました。動作は3次元で記録され、演奏は匿名化されたスティックフィギュア動画に変換されました。外骨格の使用有無や録画時期を知らない5人の経験豊富なバイオリニストのパネルが、テクニックの質を7点尺度で評価しました。
改善した点と改善しなかった点
短いレッスンのあと、両群とも上達しましたが、外骨格を着けた群の改善がより大きかったです。専門家の評価では、リコール演奏はコントロール群より高く評価され、開始時点はほぼ同レベルでした。モーションデータもこれを裏付けました:触覚ガイダンスを受けた演奏者は肘のより健全な可動域を使い、教師の弓軌跡を空間的・時間的により近く再現しました。弓の滑らかさや一貫性を示す指標も専門家の所見と一致しました。興味深いことに、リズムに合わせて弓替えを的確に行うなどの純粋なタイミング指標は、外骨格がある群でビデオのみの群よりも顕著に改善しませんでした。これは、この装置が「いつ」動くかという面よりも、腕が「どのように」「どこで」動くかを主に強化することを示唆します。
ロボットを着けた感覚
参加者の自己報告は微妙な様相を示しました。外骨格群の多くは、物理的なガイダンスが正しい腕の動き、姿勢、弓の接触を理解する助けになったと述べ、レッスンはコントロール群よりも有益に感じられたと言いました。一方で欠点にも気づきました。装置は重量があり、肩の一部の動きを制限し、時にかさばったり騒がしく感じられることがありました。モーションデータは、外骨格稼働時に肩の動きが過剰になることがあり、そうした変化した動きのパターンが長期的に望ましいかどうかは疑問を残すことを確認しました。本研究は1回のトレーニングセッションのみで長期追跡は行っていないため、効果の持続性や他の曲や実際の演奏への転移がどの程度あるかは不明のままです。
将来の音楽レッスンへの示唆
一般的な視点から言えば、結論は慎重に楽観的です:上手な弓の感覚を腕に「教える」ロボットスリーブは、特に動きの形状や滑らかさという重要な側面について、初心者が素早く身につける手助けになりうることが示されました。専門家の目、精密な動作計測、学習者自身の報告はいずれも同じ方向を示し、触覚ガイダンスは標準的なビデオ指導以上の有用性を付加しました。とはいえ技術はまだ実験段階です。注目すべきプロトタイプから信頼される教育ツールへと移行させるには、かさ張りを減らし、自然な肩の動きを歪めない設計を行い、より長期かつ多様な奏者での試験が必要です。これらの課題がクリアされれば、同様のシステムはバイオリニストだけでなく、外科医や脳卒中患者など複雑な身体技能を学ぶあらゆる人々に対して、望ましい動きがどのように感じられるかを明確に、手に取るように示す支援を提供できる可能性があります。
引用: Campo, A., Peperoni, E., Capitani, S.L. et al. Haptic feedback in violin education as a case study of robotic exoskeleton-mediated motor learning. Sci Rep 16, 13639 (2026). https://doi.org/10.1038/s41598-026-39226-8
キーワード: 触覚フィードバック, バイオリン練習, ロボット外骨格, 運動学習, 音楽教育技術