Clear Sky Science · ar
التغذية اللمسية في تعليم الكمان كدراسة حالة لتعلم الحركة عن طريق طقم خارجي روبوتي
أيادٍ مساعدة لتعلم الكمان
التعلم على الكمان معروف بصعوبته على اليدين والذراعين والأذنين. على المبتدئين تنسيق عشرات الحركات الصغيرة لمجرد سَح القوس بشكل مستقيم على الوتر. تطرح هذه الدراسة سؤالاً بسيطاً لكنه مشوق: هل يمكن أن يساعد «كمّ روبوتي» قابل للارتداء يدفع ذراعك بلطف على تعلم تلك الحركات أسرع وبشكل أدق؟ من خلال الجمع بين تتبُّع الحركة، أحكام الخبراء، وتجارب المستخدمين، اختبر الباحثون ما إذا كانت التغذية اللمسية — التوجيه الفيزيائي الذي يمكنك الشعور به — قادرة على جعل دروس الكمان الأولى أكثر فعالية.

كمّ روبوتي يوجّه قوسك
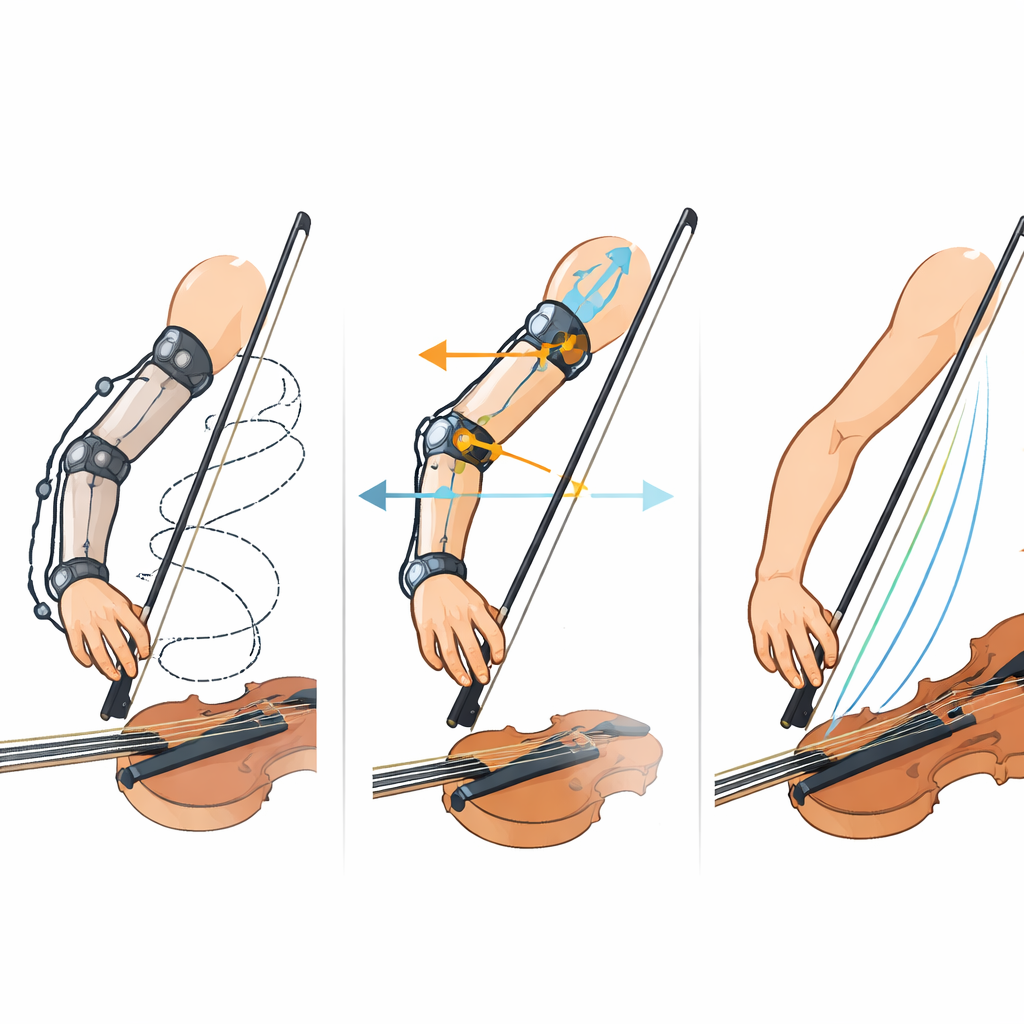
بنَت الفريق جهازاً خارجياً للذراع العلوية يربط بذراع القوس لدى العازف. يحتوي على مفاصل مُحركة عند الكتف والكوع بالإضافة إلى دعامات خفيفة على الظهر والساعد. في الوضع المحايد يتحرك ببساطة مع العازف ويسجل الحركة. في وضع التوجيه، يقارن وضع ذراع العازف بمقْطَع «مثالي» مسجّل لحركة القوس لشخص محترف، ويدفع أو يسحب الذراع بلطف نحو ذلك المسار باستخدام قوى شبيهة بالنوابض. يقترن الطقم الخارجي بذِرْوة التقطيع الحركي ونظام تصوير حتى يتمكن المتعلم من مشاهدة وتقليد المعلم بينما يشعر أيضاً كيف ينبغي أن تكون الحركة الصحيحة.
اختبار التقنية
للتحقق مما إذا كان هذا الجهاز يحسّن التعلم فعلياً، جند الباحثون 24 رجلاً بالغاً كانوا مبتدئين في الكمان. شاهد الجميع نفس درس الفيديو القصير لمدة 20 دقيقة من مدرس محترف ومارسوا ثلاث تمارين بسيطة للقوس. ارتدى نصف المشاركين الطقم الخارجي وتلقوا توجيهاً لمسيّاً في الوقت الحقيقي خلال الدرس؛ أما النصف الآخر فاعتمد على الصوت والفيديو فقط. أجرى جميع العازفين أداءً «أساسياً» قبل التدريب وأداءً «استدعائياً» بعده، كلاهما دون إرشاد. سُجلت حركاتهم ثلاثية الأبعاد، وحوّل أداءهم إلى مقاطع فيديو تُظهر هيكل العَضَلات كعصا مجهولة الهوية. قيّم فريق مكوّن من خمسة عازفين ذوي خبرة، لم يعرفوا من استخدم الطقم أو متى قُطعت المقاطع، جودة التقنية على مقياس من سبع نقاط.
ما تحسّن — وما لم يتحسّن
تحسّن كلا المجموعتين بعد الدرس القصير، لكن من ارتدوا الطقم الخارجي تحسّنوا أكثر. قيّم الحكّام الخبراء أداءاتهم الاستدعائية أعلى من أداء المجموعة الضابطة، رغم أن الجميع بدأوا على مستوى مشابه. دعمت بيانات الحركة هذا الاستنتاج: انتهى العازفون الذين تلقوا التوجيه اللمسي باستخدام نطاق حركة أكثر صحة في الكوع ووافقت مسارات قوسهم مسار المعلم بشكل أوثق في المكان والزمان. كما راقَب الباحثون مقاييس نعومة واتساق ضربات القوس التي عكست رأي الخبراء. من المثير للاهتمام أن مقاييس التوقيت البحت — مدى دقة العازفين في مواقيت تغيّرات القوس بالإيقاع — لم تتحسن أكثر مع الطقم مقارنةً بالفيديو وحده، ما يشير إلى أن الجهاز يعزّز بصورة أساسية كيف وأين تتحرك الذراع بدلاً من متى.
كيف كان إحساس ارتداء روبوت
قدمت تقارير المشاركين صورة مُركّبة. ذكر كثيرون في مجموعة الطقم أن التوجيه الفيزيائي ساعدهم على فهم حركات الذراع الصحيحة، وضعية الجسم، واتصال القوس بالوتر، وشعروا أن الدرس كان أكثر إفادة مقارنةً بالمجموعة الضابطة. في المقابل لاحظ العازفون عيوباً: أضاف الجهاز وزناً، قيد بعض حركات الكتف، وأحياناً بدا ضخماً أو مزعجاً صوتياً. أكدت بيانات الحركة أن حركات الكتف قد تصبح مبالغاً فيها أثناء نشاط الطقم، مما يثير تساؤلات حول ما إذا كانت هذه الأنماط المعدّلة مرغوبة على المدى الطويل. كما أن الدراسة كانت قصيرة — جلسة تدريب واحدة ولا متابعة على المدى الطويل — لذلك يبقى غير واضح مدى دوام الفوائد أو مدى انتقالها إلى مقطوعات أخرى أو للعزف في العالم الحقيقي.
ما الذي تعنيه هذه النتائج لدروس الموسيقى المستقبلية
من منظور غير متخصص، الخلاصة متفائلة بحذر: إن كمّاً روبوتياً «يعلم» ذراعك كيف يشعر السَحّ الجيد بالقوس يمكن بالفعل أن يساعد المبتدئين على التقاط جوانب رئيسية من تقنية الكمان بسرعة، وبالأخص شكل وحَسَنية حركاتهم. اتفقت العيون الخبيرة، القياسات الحركية الدقيقة، والمتعلمون أنفسهم على اتجاه واحد: أضاف التوجيه اللمسي شيئاً مفيداً يتجاوز التعليم بالفيديو التقليدي. ومع ذلك، تظل التقنية تجريبية. للانتقال من نموذج أولي لافت إلى أداة تعليمية موثوقة، سيحتاج المصممون إلى تقليل الضخامة، تجنّب تشويه الحركة الطبيعية للكتف، واختبار الجهاز لفترات أطول ومع لاعبين أكثر تنوعاً. إذا توافرت هذه الضمانات، فإن أنظمة مشابهة قد تدعم في نهاية المطاف ليس فقط عازفي الكمان، بل أي شخص يتعلم مهارات جسدية معقدة — من الجراحين إلى مرضى السكتة الدماغية — من خلال منح أجسادهم إحساساً واضحاً وملموساً بكيفية الشكل الصحيح للحركة.
الاستشهاد: Campo, A., Peperoni, E., Capitani, S.L. et al. Haptic feedback in violin education as a case study of robotic exoskeleton-mediated motor learning. Sci Rep 16, 13639 (2026). https://doi.org/10.1038/s41598-026-39226-8
الكلمات المفتاحية: التغذية اللمسية, تدريب الكمان, طقم خارجي روبوتي, تعلم الحركة, تكنولوجيا تعليم الموسيقى