Clear Sky Science · it
SVDHLA: automa ibrido di apprendimento a profondità variabile simmetrica e sua applicazione
Insegnare alle macchine quando smettere di insistere
I moderni sistemi di apprendimento spesso si trovano di fronte a un dilemma semplice ma cruciale: per quanto tempo dovrebbero continuare a provare la stessa scelta prima di passare a qualcosa di nuovo? Questo articolo affronta la questione per un modello classico di presa di decisione e mostra come dare al sistema un modo per regolare la propria perseveranza possa renderlo più veloce, più affidabile e persino utile nell’addestrare reti neurali migliori.

Perché il classico prova-e-errore non basta
Il lavoro si basa su un’idea consolidata chiamata automa di apprendimento, un modello semplice che sceglie ripetutamente tra diverse opzioni e apprende da ricompense e penalità. Una versione ampiamente usata, nota come LK,N,K, rappresenta ogni opzione come una corta scala di stati interni. Più profonda è la scala, più volte l’automa deve essere punito prima di abbandonare quell’opzione. Una profondità ridotta porta il sistema a cambiare idea rapidamente, favorendo l’esplorazione, mentre una profondità elevata lo rende testardo, privilegiando lo sfruttamento di ciò che sembra funzionare. Il problema è che questa profondità deve essere fissata a priori, anche se l’impostazione migliore dipende fortemente dal problema e può cambiare nel tempo. In contesti stazionari una scelta scorretta rallenta l’apprendimento; in contesti mutevoli può intrappolare il sistema in comportamenti obsoleti o renderlo nervoso e instabile.
Un senso di perseveranza che si auto-regola
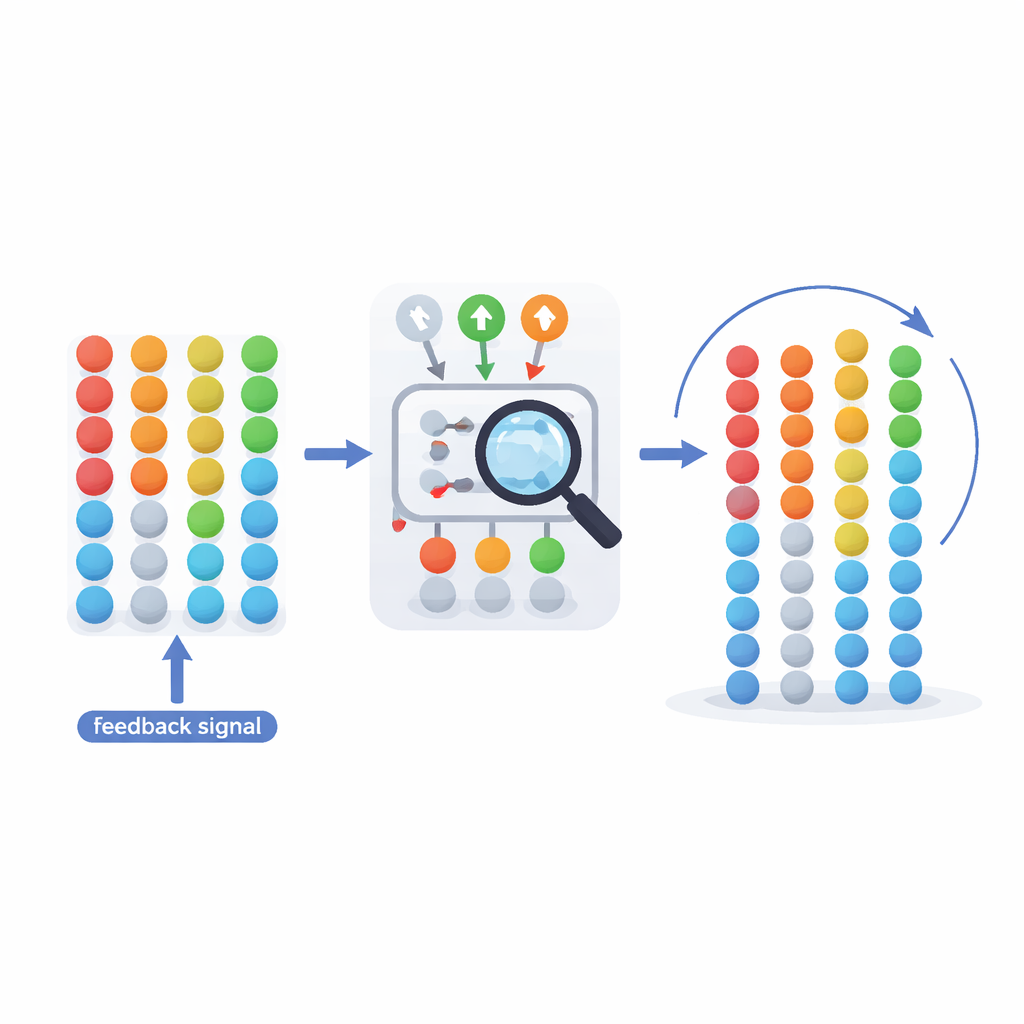
Per superare questa rigidità, gli autori introducono SVDHLA, abbreviazione di Symmetric Variable Depth Hybrid Learning Automaton. Invece di bloccare la profondità in anticipo, SVDHLA accoppia l’automa classico basato su scale a un secondo decisore più piccolo il cui unico compito è regolare quanto siano profonde quelle scale. Questo aiutante sceglie tra tre azioni semplici per l’intero sistema: aumentare la profondità di ogni opzione di uno, ridurre tutte le profondità di uno o fermarsi e mantenere la profondità corrente. Le sue decisioni si basano su come il principale automa si è comportato recentemente, riassunto da quanto spesso raggiunge gli stati interni più favorevoli rispetto a quante volte è costretto a cambiare opzione. Nel tempo questo crea un circuito di retroazione: se il sistema cambia troppo spesso, l’aiutante tende ad aumentare la profondità e diventare più paziente; se si aggrappa a opzioni scadenti, tende a ridurre la profondità e reagire più rapidamente.
Messa alla prova del nuovo apprendista
I ricercatori hanno testato SVDHLA in una varietà di mondi simulati al computer. Alcuni avevano schemi di ricompensa fissi; altri cambiavano in modo imprevedibile nel tempo o penalizzavano scelte ripetute frequentemente. In tutti questi scenari, il nuovo approccio ha costantemente ottenuto una ricompensa totale maggiore e ha subito meno rimpianto — cioè opportunità perduta rispetto a un decisore ideale — rispetto sia al modello originale sia a una variante ibrida più recente. Il vantaggio chiave è che SVDHLA può scoprire da solo se deve comportarsi con cautela o audacia, e adattare tale atteggiamento man mano che le condizioni cambiano. Anche in casi difficili con molte azioni possibili e solo una o due buone, il sistema si assestò rapidamente su un intervallo utile di profondità invece di armeggiare senza fine con la propria struttura.
Dalle code e il traffico alle reti neurali
Per dimostrare che non si tratta solo di un miglioramento teorico, gli autori hanno applicato SVDHLA a due problemi pratici. Primo, lo hanno usato per decidere quale coda un server dovesse servire in un sistema informatico simulato in cui i task arrivano e terminano a velocità irregolari. Qui, la profondità adattiva ha aiutato lo scheduler a mantenere tempi medi di attesa più bassi rispetto sia agli automi di apprendimento tradizionali sia ad algoritmi bandit popolari come softmax, upper confidence bounds e Thompson sampling. Secondo, hanno impiegato SVDHLA come controllore del dropout in una rete neurale — la tecnica di spegnere casualmente unità durante l’addestramento per evitare l’overfitting. Invece di usare un tasso di dropout fisso, SVDHLA ha appreso, batch dopo batch, se aumentare, diminuire o mantenere il livello di dropout in base a come cambiava la perdita. Questo dropout adattivo ha prodotto una precisione leggermente superiore e risultati più stabili sul compito di riconoscimento delle cifre MNIST rispetto a un controllore basato su automi di apprendimento precedente.
Cosa significa per sistemi di apprendimento più intelligenti
In termini semplici, SVDHLA fornisce a un apprendente per prova ed errore un senso auto-regolante di quanto debba essere testardo. Piuttosto che affidarsi a un ingegnere umano per indovinare il giusto equilibrio tra provare nuove opzioni e restare fedele a quelle vecchie, il sistema misura i propri successi e fallimenti e regola di conseguenza la propria perseveranza. Lo studio mostra che questo semplice strato aggiuntivo di adattamento può migliorare le prestazioni in ambienti statici e mutevoli, e può essere integrato in sistemi più grandi come gestori di code e reti neurali. Guardando avanti, idee simili potrebbero aiutare molti altri metodi di apprendimento a calibrare automaticamente quanto rapidamente cambiano idea, rendendo i decisori artificiali sia più robusti sia più facili da distribuire.
Citazione: Nikhalat-Jahromi, A., Saghiri, A.M. & Meybodi, M.R. SVDHLA: symmetric variable depth hybrid learning automaton and its application. Sci Rep 16, 14336 (2026). https://doi.org/10.1038/s41598-026-43271-8
Parole chiave: automi di apprendimento, apprendimento per rinforzo, esplorazione sfruttamento, dropout adattivo, multi-armed bandit