Clear Sky Science · es
SVDHLA: autómata de aprendizaje híbrido de profundidad variable simétrica y su aplicación
Enseñar a las máquinas a saber cuándo dejar de intentarlo
Los sistemas de aprendizaje modernos suelen enfrentarse a un dilema simple pero crucial: ¿cuánto tiempo deben seguir intentando la misma opción antes de probar algo nuevo? Este artículo aborda esa pregunta para un modelo clásico de toma de decisiones y muestra cómo dotar al sistema de un modo de ajustar su propia persistencia puede hacerlo más rápido, más fiable e incluso útil para entrenar mejores redes neuronales.

Por qué el ensayo y error clásico se queda corto
El trabajo se basa en una idea de larga trayectoria llamada autómata de aprendizaje, un modelo sencillo que elige repetidamente entre varias opciones y aprende de recompensas y penalizaciones. Una versión ampliamente usada, conocida como LK,N,K, representa cada opción como una pequeña escalera de estados internos. Cuanto más profunda es la escalera, más veces debe ser castigado el autómata antes de abandonar esa opción. Una profundidad pequeña hace que el sistema cambie de idea con rapidez, fomentando la exploración, mientras que una profundidad grande lo vuelve terco, favoreciendo la explotación de lo que parece funcionar. El problema es que esa profundidad debe fijarse por adelantado, aunque la mejor configuración depende mucho del problema y puede cambiar con el tiempo. En entornos estacionarios una mala elección ralentiza el aprendizaje; en entornos cambiantes puede atrapar al sistema en comportamientos obsoletos o hacerlo inestable y nervioso.
Un sentido de persistencia que se ajusta solo
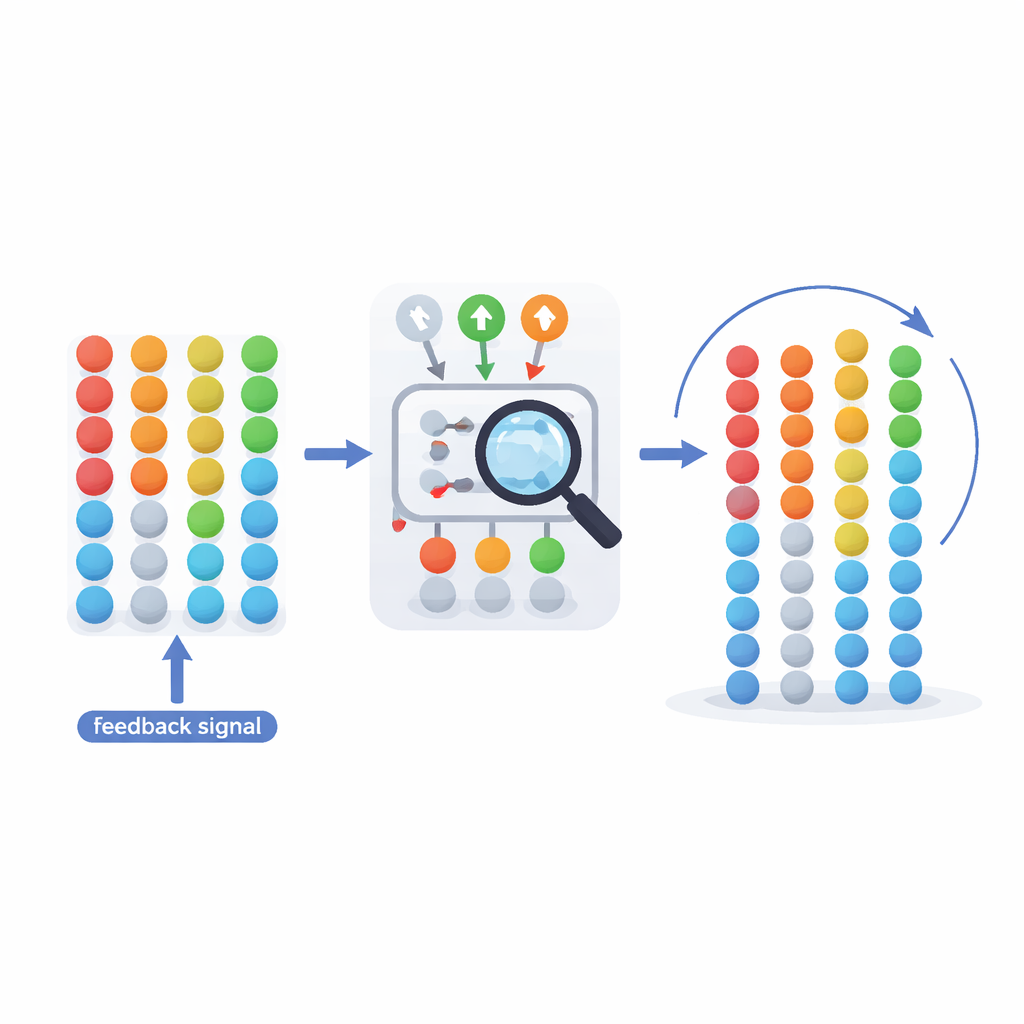
Para superar esta rigidez, los autores introducen SVDHLA, siglas de Symmetric Variable Depth Hybrid Learning Automaton. En lugar de fijar la profundidad desde el principio, SVDHLA acopla el autómata clásico basado en escaleras a un segundo decisor más pequeño cuya única tarea es ajustar cuán profundas son esas escaleras. Este ayudante elige entre tres acciones simples para todo el sistema: aumentar la profundidad de cada opción en una, reducir todas las profundidades en una, o parar y mantener la profundidad actual. Basa sus decisiones en cómo le ha ido al autómata principal recientemente, resumido por la frecuencia con la que alcanza los estados internos más favorables frente a la frecuencia con la que se ve obligado a cambiar de opción. Con el tiempo, esto crea un bucle de retroalimentación: si el sistema cambia de opción con demasiada frecuencia, el ayudante tiende a aumentar la profundidad y volverse más paciente; si se aferra a opciones pobres, tiende a reducir la profundidad y reaccionar más rápido.
Poniendo a prueba al nuevo aprendiz
Los investigadores probaron SVDHLA en una variedad de mundos simulados por ordenador. Algunos tenían patrones de recompensa fijos; otros cambiaban de forma impredecible con el tiempo o penalizaban las elecciones repetidas con frecuencia. En todos estos escenarios, el nuevo enfoque obtuvo de forma consistente más recompensa total y sufrió menos arrepentimiento —es decir, pérdida de oportunidad respecto a un tomador de decisiones ideal— que tanto el modelo original como una variante híbrida más reciente. La ventaja clave es que SVDHLA puede descubrir por sí mismo si debe comportarse con cautela o con audacia, y ajustar esa postura conforme cambian las condiciones. Incluso en casos difíciles con muchas acciones posibles y solo una o dos buenas, el sistema pronto se fijó en un rango útil de profundidades en lugar de ajustar su estructura sin descanso.
Desde colas y tráfico hasta redes neuronales
Para demostrar que no se trata solo de una mejora de laboratorio, los autores aplicaron SVDHLA a dos problemas prácticos. Primero, lo usaron para decidir qué cola debe atender un servidor a continuación en un sistema informático simulado donde las tareas llegan y terminan a ritmos irregulares. Aquí, la profundidad adaptativa ayudó al planificador a mantener tiempos de espera promedio más bajos que tanto los autómatas de aprendizaje tradicionales como algoritmos de estilo bandido populares como softmax, límites superiores de confianza y muestreo de Thompson. En segundo lugar, emplearon SVDHLA como controlador del dropout en una red neuronal —la técnica de apagar unidades aleatoriamente durante el entrenamiento para evitar el sobreajuste. En lugar de usar una tasa de dropout fija, SVDHLA aprendía, por lotes, si aumentar, disminuir o mantener el nivel de dropout según cómo cambiara la pérdida. Este abandono adaptativo produjo una precisión ligeramente mayor y resultados más estables en la tarea de reconocimiento de dígitos MNIST que un controlador basado en autómatas de aprendizaje anterior.
Qué significa esto para sistemas de aprendizaje más inteligentes
En términos coloquiales, SVDHLA da a un aprendiz por ensayo y error un sentido de cuán terco debe ser que se ajusta solo. En vez de depender de un ingeniero humano para adivinar el equilibrio correcto entre probar nuevas opciones y mantener las antiguas, el sistema mide sus propios éxitos y fracasos y adapta su persistencia en consecuencia. El estudio muestra que esta sencilla capa adicional de adaptación puede mejorar el rendimiento tanto en entornos estáticos como cambiantes, y puede integrarse en sistemas mayores como gestores de colas y redes neuronales. Mirando al futuro, ideas similares podrían ayudar a muchos otros métodos de aprendizaje a calibrar automáticamente la rapidez con la que cambian de opinión, haciendo a los tomadores de decisiones artificiales más robustos y más fáciles de desplegar.
Cita: Nikhalat-Jahromi, A., Saghiri, A.M. & Meybodi, M.R. SVDHLA: symmetric variable depth hybrid learning automaton and its application. Sci Rep 16, 14336 (2026). https://doi.org/10.1038/s41598-026-43271-8
Palabras clave: autómatas de aprendizaje, aprendizaje por refuerzo, exploración explotación, abandono adaptativo, bandido con varios brazos