Clear Sky Science · es
Evolución de la información sobre la identidad del objeto en la corteza sensorimotora durante el agarre
Cómo el cerebro sabe qué estamos sujetando
Cada vez que coges una taza de café a oscuras o sacas el móvil del bolsillo sin mirar, tu cerebro de algún modo sabe qué estás agarrando. Sin embargo, las señales que llegan desde la mano y el brazo cambian drásticamente en el instante en que tocas el objeto. Este estudio plantea una pregunta sencilla pero profunda: ¿cómo hace el cerebro para mantener constancia de qué objeto tienes en la mano al pasar de alcanzar el objeto a sujetarlo realmente?
Del alcance a la sujeción
Para explorar esto, los investigadores trabajaron con monos macacos entrenados para agarrar una serie de objetos cotidianos que variaban en tamaño, forma y orientación. Un brazo robótico acercaba un objeto a la vez directamente a la mano del mono para que el hombro y el brazo permanecieran casi inmóviles. Antes del contacto, la mano se abría y configuraba de forma natural para ajustarse al objeto; tras el contacto, los dedos se cerraban con suficiente fuerza como para romper un enlace magnético y sostener el objeto. Durante todo este comportamiento, el equipo registró la actividad eléctrica de cientos de neuronas individuales en varias áreas que controlan el movimiento y el tacto de la mano.
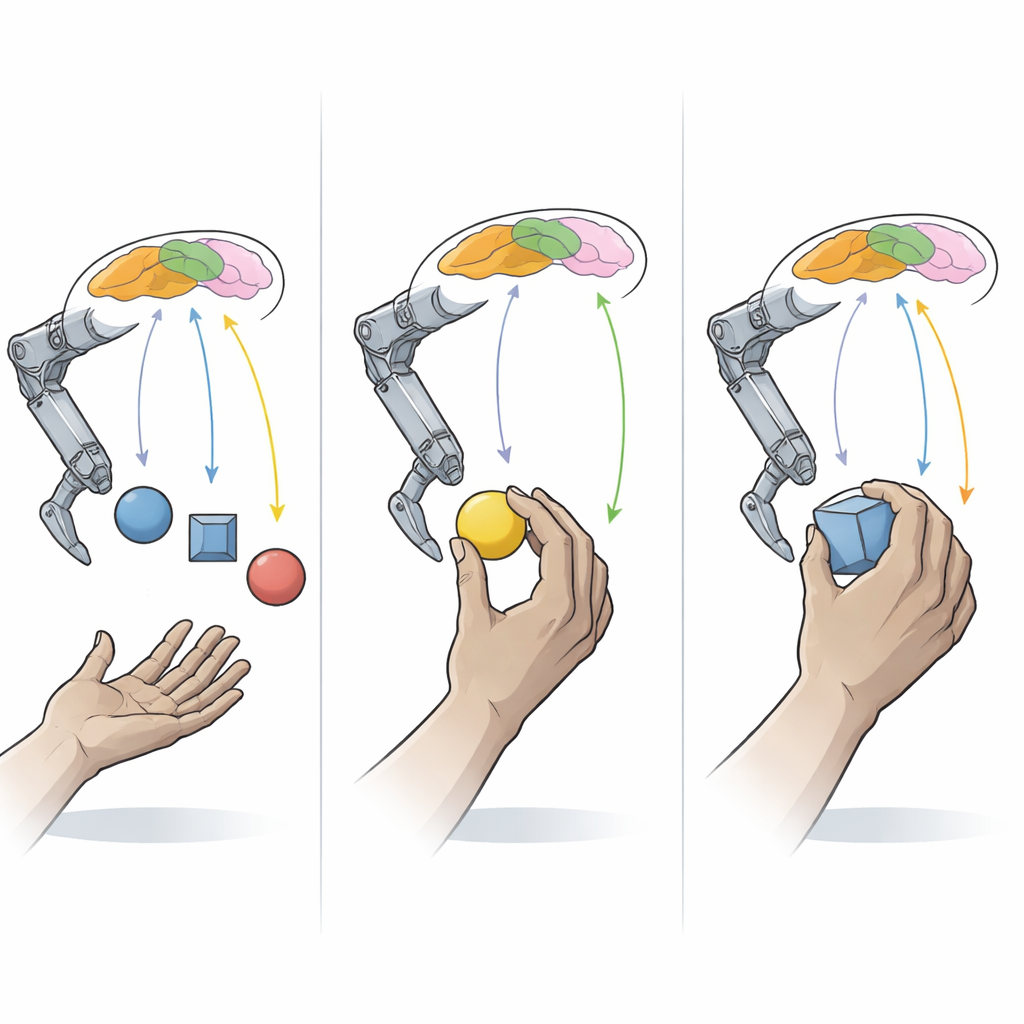
Diferentes áreas cerebrales, diferentes momentos
Las grabaciones provinieron de cuatro regiones vecinas a lo largo del surco central del cerebro. Una es la corteza motora primaria, que contribuye a activar los músculos. Tres se encuentran en el área primaria del tacto: una que principalmente recibe señales de músculos y tendones sobre los ángulos articulares, otra que recibe señales de la piel y una tercera que combina ambos tipos de entrada. Antes de que la mano hiciera contacto, las neuronas en las regiones motoras y en las que detectan músculo estaban más activas y ya contenían información que distinguía qué objeto se iba a agarrar. En contraste, las regiones centradas en la piel estaban relativamente silenciosas y aportaban poca o ninguna información sobre la identidad del objeto durante esta fase de “preconfiguración” de la mano.
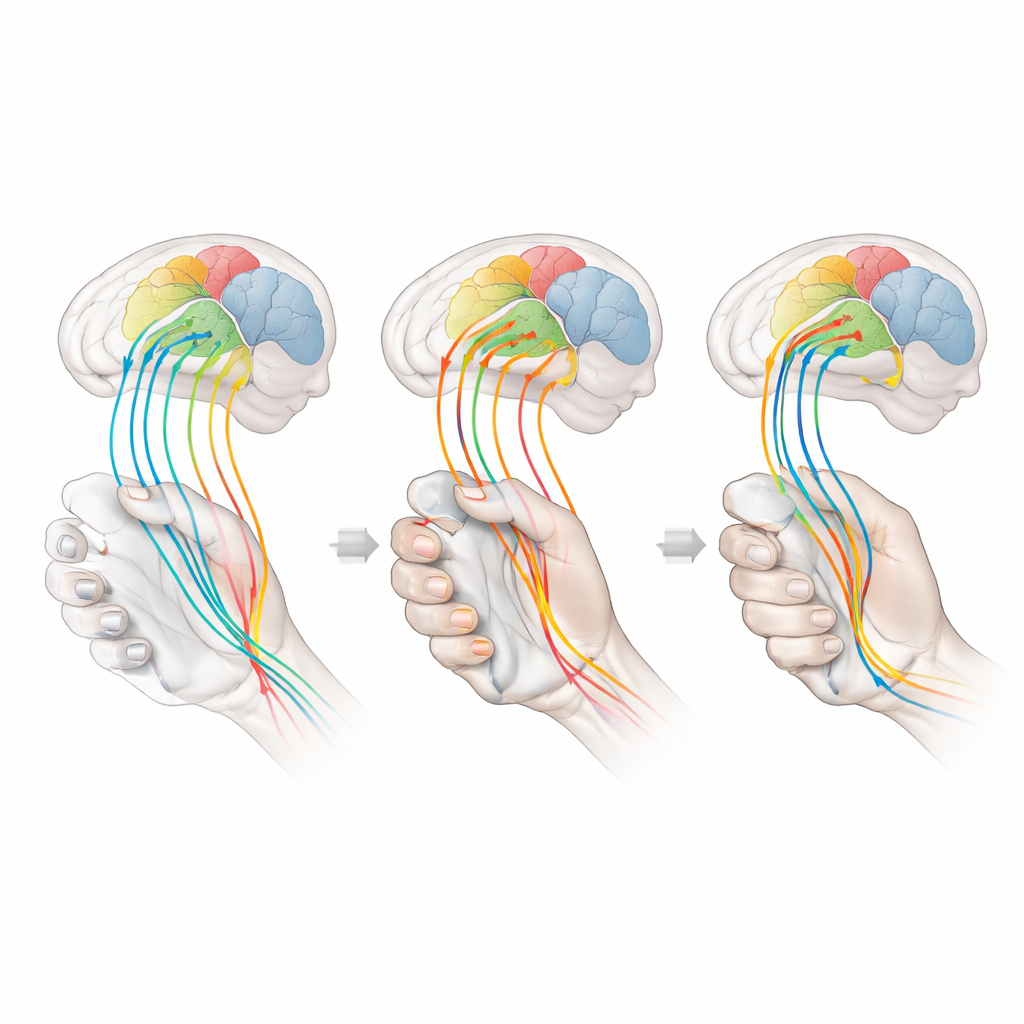
Qué cambia en el momento del tacto
Cuando los dedos encontraron el objeto, el patrón se invirtió de forma inesperada. La actividad total en muchas regiones disminuyó tras el contacto, a pesar de que los monos seguían apretando los objetos. Sin embargo, la cantidad de información específica del objeto aumentó en las áreas táctiles basadas en la piel y en la región que combina entradas, y se mantuvo fuerte en la corteza motora y en la que detecta músculos. Dicho de otro modo, menos pulsos eléctricos transportaban información más significativa. Los análisis que midieron la eficiencia con la que cada neurona usaba su actividad mostraron que la identidad del objeto se consolidaba en torno al momento del contacto y luego permanecía estable, aunque los niveles brutos de actividad descendieran.
Códigos cambiantes en lugar de mapas estáticos
Una idea clave surgió al comparar cómo se relacionaban los patrones de actividad antes y después del contacto. Si el cerebro usara el mismo “código” para la identidad del objeto durante todo el movimiento, un algoritmo entrenado para leer los objetos a partir de la actividad previa al contacto debería también rendir bien después del contacto, y viceversa. En cambio, esos decodificadores cruzados entre etapas funcionaron mal en todas las regiones, especialmente en las áreas táctiles basadas en la piel y en la zona de entradas combinadas. Solo cuando el decodificador se entrenaba con datos de ambas fases pudo recuperar una lectura unificada, aunque todavía imperfecta, de la postura de la mano y la identidad del objeto. Esto demuestra que, aunque la información sobre lo que se está agarrando está siempre presente, la forma en que se representa en la actividad cerebral cambia bruscamente cuando la mano comienza a sentir y apretar el objeto.
Por qué esto importa para manos y máquinas
Estos resultados dibujan la corteza sensorimotora como un centro de comunicación flexible más que como un mapa estático. Antes del contacto, las regiones motoras y las que detectan músculo reflejan principalmente cómo se configura y mueve la mano, lo que permite al cerebro “adivinar” el objeto a partir de la postura. Tras el contacto, las regiones sensibles al tacto se llenan repentinamente de información sobre qué superficies de la mano están cargadas y cómo el objeto presiona la piel, mientras que las zonas motoras y de detección muscular mezclan la postura con las fuerzas necesarias para sostener el objeto. Para un lector general, la conclusión es que tu cerebro no almacena una huella fija de cada objeto. En su lugar, reescribe constantemente su descripción interna a medida que tus dedos se cierran y hacen contacto, entrelazando movimiento y tacto de forma tan fluida que simplemente experimentas la sensación de tener un objeto sólido en la mano.
Cita: Yan, Y., Sobinov, A.R., Goodman, J.M. et al. Evolution of object identity information in sensorimotor cortex throughout grasp. Nat Commun 17, 2784 (2026). https://doi.org/10.1038/s41467-026-69502-0
Palabras clave: agarre, corteza sensorimotora, tacto y propiocepción, reconocimiento de objetos por la mano, codificación neural