Clear Sky Science · de
KI-generierte Drohnen-Befehls- und Kontrollstation, die im Himmel gehostet wird
Warum das für den Alltag des Fliegens wichtig ist
Stellen Sie sich vor, Sie steuern eine Drohne von Ihrem Telefon oder Laptop aus, selbst wenn sich die Drohne tausende Kilometer entfernt befindet — und stellen fest, dass das gesamte Kontrollsystem, das diese Drohne betreibt, nicht von einem menschlichen Programmierer, sondern von einer künstlichen Intelligenz geschrieben wurde. Dieses Papier beschreibt genau das: ein Experiment, bei dem ein KI‑System die gesamte Software für eine Drohnen‑Kommandozentrale schrieb, einschließlich einer Version, die tatsächlich auf der Drohne in der Luft läuft wie eine „Website im Himmel“. Die Arbeit bietet einen Einblick, wie zukünftige Roboter weitgehend von anderen Maschinen entworfen und programmiert werden könnten.
Von handgeschriebener Software zu maschinell verfasstem Steuerungs‑Code
Bisher wurde die Software, die Drohnen in der Luft hält und auf Piloten reagiert, mühsam von Ingenieurteams erstellt. Low‑Level‑„Flight Controller“ umfassen Hunderttausende bis Millionen von Codezeilen, und höherstufige Werkzeuge, die Karten und Schaltflächen auf einem Bildschirm anzeigen — die sogenannten Ground‑Control‑Stations — sind ebenfalls große Softwareprojekte. Die Arbeitsgruppe des Autors hatte zuvor Jahre damit verbracht, ein webbasiertes Steuerungssystem von Hand zu bauen, das Drohnen über das Internet fliegen ließ und sogar einen Guinness‑Weltrekord für Fernsteuerung über große Entfernungen ermöglichte. In der neuen Studie wollte das Team herausfinden, wie viel moderne KI‑Codierungswerkzeuge leisten können, um ein derartiges System mit nahezu keiner menschlichen Programmierung nachzubilden.
Der KI beibringen, ein Piloten‑Dashboard zu bauen
Das erste Hauptergebnis ist der „Prozess“, mit dem die KI Drohnensoftware schreibt. Der Forscher arbeitete mehrere Phasen durch, beginnend mit einfachen Chatfenstern, die kurze Python‑Skripte zum Starten, Landen und zur Darstellung der Drohne auf einer Karte erzeugten. Mit wachsendem Projektumfang stieß man an die Speichergrenzen früherer KI‑Modelle, die nicht alle notwendigen Dateien und Anweisungen gleichzeitig im Blick behalten konnten. Später verlagerte sich die Arbeit in spezialisierte Entwicklungsumgebungen, die direkt mit der KI verbunden waren und es ihr erlaubten, viele Dateien zu bearbeiten, auf Fehlermeldungen zu reagieren und das System schrittweise zu verfeinern. In vier Entwicklungssprints wurden verschiedene große Sprachmodelle damit beauftragt, Fehler zu beheben, Funktionen hinzuzufügen und den Code neu zu organisieren. Menschen lieferten Ziele, testeten die Ergebnisse und beschrieben Fehlfunktionen — schrieben jedoch keinen der Produktionscodezeilen selbst.
Eine Website bauen, die mit der Drohne fliegt
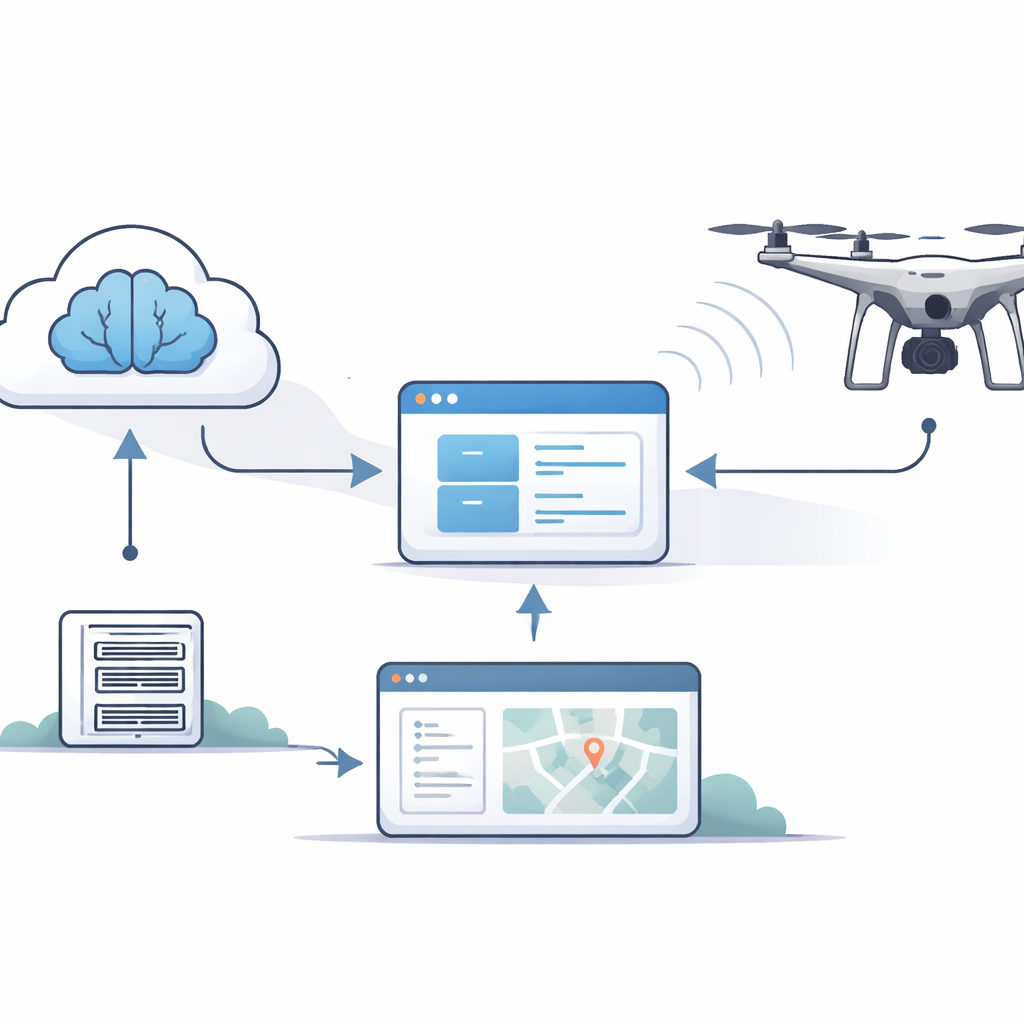
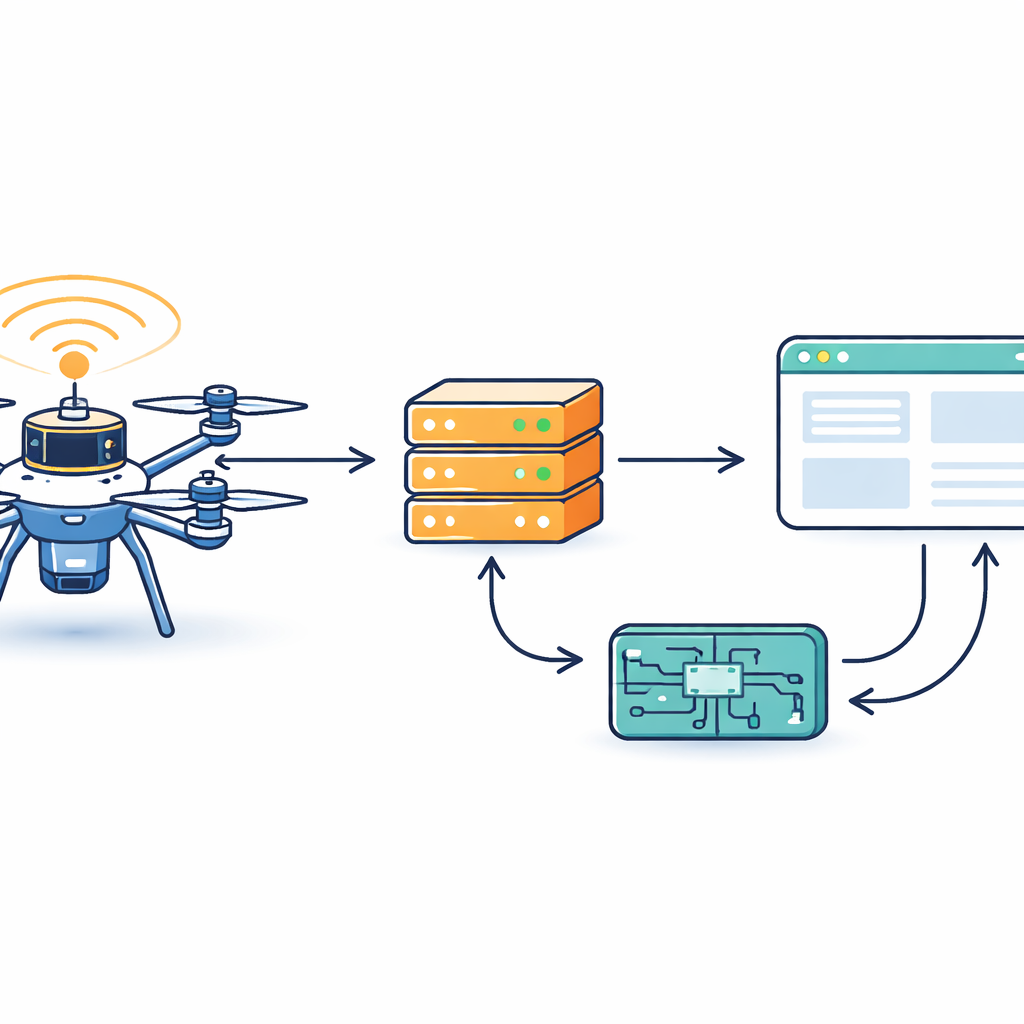
Das zweite Hauptergebnis ist die fertige Softwarearchitektur namens WebGCS. Sie verhält sich wie eine vertraute Webanwendung: eine Karte und Steuerknöpfe im Browser, die in Echtzeit mit einem Server kommunizieren, der wiederum mit der Drohne spricht. Entscheidenderweise wählte die KI dieses Drei‑Schichten‑Design eigenständig und setzte gängige Web‑Werkzeuge zu einem funktionierenden Ganzen zusammen. Noch bemerkenswerter ist, dass dieselbe Kommandozentrale direkt auf einem kleinen Computer laufen kann, der an der Drohne montiert ist. In diesem Modus erzeugt die Drohne selbst einen WiFi‑Hotspot und „hostet“ ihre eigene Kontrollwebsite in der Luft. Jeder Pilot mit einem Browser, sei er in der Nähe oder über das Internet verbunden, kann sich einloggen und die Drohne ohne Installation spezieller Software steuern.
Die maschinell geschriebene Steuerung auf die Probe stellen
Das Team testete das KI‑generierte System zunächst in Simulationen und anschließend auf einem leichtgewichtigen Quadrocopter mit einem winzigen Raspberry‑Pi‑Computer. Nur mit der Browser‑Schnittstelle bewaffnet, konnten sie die Drohne scharf schalten, Startbefehle geben, zu ausgewählten Punkten auf der Karte fliegen lassen und zur Heimatposition zurückkehren. Frühe Flüge zeigten Probleme wie falsche Positionsaktualisierungen oder fehlgeschlagene Startbefehle; diese wurden an die KI zurückgemeldet, die den Code so lange anpasste, bis die Probleme verschwanden. Die endgültige Version, etwa 10.000 Zeilen lang, lief zuverlässig in mehreren Flügen. Im Vergleich zum früheren, handcodierten CloudStation‑Projekt benötigte der KI‑gestützte Ansatz etwa zwanzigmal weniger menschliche Arbeitsstunden, um ähnliche Funktionalität zu erreichen.
Grenzen heute, Möglichkeiten morgen
Trotz des Erfolgs zeigt die Studie auch gegenwärtige Beschränkungen auf. Die heutigen KI‑Modelle tun sich schwer damit, deutlich mehr als etwa zehntausend Zeilen eng verknüpften Codes zu verwalten, ohne den Überblick darüber zu verlieren, wie verschiedene Teile zusammenpassen. Das begrenzt, wie komplex ein von KI verfasstes Roboter‑„Gehirn“ ohne zusätzliche Techniken wie Teams kooperierender KI‑Agenten sein kann. Dennoch demonstriert dieses Experiment, dass eine KI bereits in der Lage ist, eine reale Drohnen‑Kommandozentrale zu entwerfen, zu implementieren und bei der Fehlersuche zu helfen — einschließlich einer Version, die auf der Drohne selbst residiert. Einfach ausgedrückt zeigt die Arbeit, wie eine Maschine einen zentralen Teil des Geistes einer anderen Maschine erschafft — und deutet darauf hin, dass zukünftige Roboter zunehmend auf Software angewiesen sein könnten, die nicht von menschlichen Händen, sondern von anderen intelligenten Systemen geschrieben wurde.
Zitation: Burke, P.J. AI generated drone command and control station hosted in the sky. npj Artif. Intell. 2, 43 (2026). https://doi.org/10.1038/s44387-026-00101-6
Schlüsselwörter: Drohnensteuerung, KI-generierter Code, webbasierte Robotik, autonome Systeme, Roboterprogrammierung