Clear Sky Science · zh
使用有限蜂窝信息的量子定位算法
只用一个信号找到你
现代手机不断被问到“你在哪里?”——无论是用于地图、叫车、紧急呼叫等。然而,许多设备一次只能监听一个基站,从而丢弃了大量附近的信号信息,这些信息本可让定位更加精确。本文探讨了量子计算的思想如何能从那一个有限的信号中挤出远高于以往的定位精度,可能重塑未来手机和网络确定我们位置的方式。
为何一个基站不够
现有的定位技术各有权衡。GPS 功能强大但耗电,且常在室内失效。基于 WiFi 的方法可以很精确,但需要密集的无线覆盖。手机中的运动传感器会随时间漂移。利用手机能听到哪些蜂窝基站的蜂窝定位优势在于几乎处处可用且耗电少。然而,大多数手机的移动标准和操作系统(包括所有 iPhone 和大多数 Android 设备)只暴露手机当前连接的单个基站。早期研究通常假定能同时获得多个邻近基站的信息,当这种丰富视角被压缩为只有一个基站时,定位精度可能下降超过一倍。需要新的想法来适应这种更为苛刻的信息限制。
把城市变成长序列
作者的第一步是重新思考如何为定位目的表示城市或街区。他们不再为每个点存储庞大的、单独的“指纹”,而是构建一个可能用户位置的图——离散点如路口和人行道位置,通过反映人们实际行走路径的边相连。让计算机在该图上执行一次长的随机游走,就能生成一条长长的参考序列,描述在可行路径上通常能听到哪些基站。然后将主序列中的每个位置转换为若干简单的二元轨迹:每个基站一条轨迹,标记该步是否听到该基站。这种紧凑表示使后续匹配更容易扩展。
让量子物理来搜索匹配
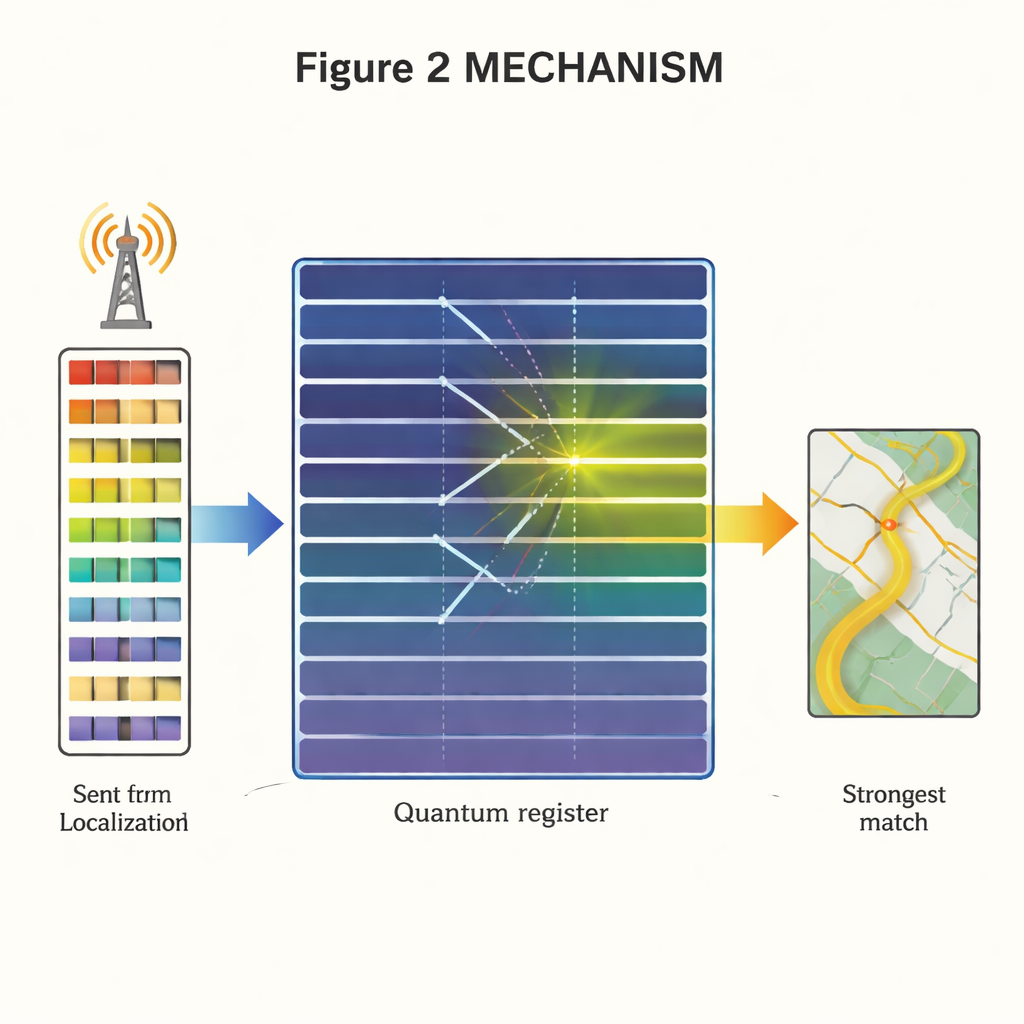
当用户移动时,手机在短时间窗口内悄然记录所服务基站的标识——可能是最近几秒钟。这就产生了另一条序列:在线轨迹。核心挑战是找到这条短轨迹在长参考序列中最合适的嵌入位置。经典方法会沿着每个可能位置滑动窗口并逐一比较,随着城市规模和数据集增大,这一过程会变得异常缓慢且占用大量内存。所提出的量子算法从根本上不同。它把所有候选位置以及每一步听到哪些基站的比特同时编码到一个量子寄存器中。量子操作并行计算每个候选片段与手机最近历史的差异,然后一种称为 Grover 算法的特殊搜索过程会提高在测量时读出最佳匹配位置的概率。
从一个基站到地图标记
在实际情况中,用户在短时间内可能听到几个不同的基站。该算法分别处理每个基站的二元轨迹,从每条轨迹得到一个候选位置估计,然后使用加权平均将这些估计融合为单个地图标记,权重偏向更有把握的匹配。作者分析了该方法所需的量子比特数量和运行时间,表明与执行类似序列匹配的最佳经典方法相比,它在时间上提供了平方级加速,在内存上实现了指数级节省。他们在 IBM 的量子模拟器上实现了该算法,并使用覆盖 0.2 平方公里、由 21 个基站覆盖的城市区域的真实户外测量数据进行测试。量子方法在保持理论效率优势的同时,达到了与其经典对手相当的精度。
这对未来手机意味着什么
该研究表明,精心设计的量子算法能够将有限的单基站蜂窝数据转化为高度精确的定位估计——中位误差约为 10 米,远满足紧急呼叫等监管要求。尽管当前的量子硬件尚无法在城市范围内运行该方法,但这项工作给出了明确的蓝图:如果未来的量子机器提供更稳定且更多的量子比特,它们即可驱动大规模、低延迟的定位系统,在尊重当前隐私和平台限制的同时提供精确且高能效的定位。
引用: Shokry, A., Youssef, M. A quantum algorithm for localization using limited cellular information. npj Wirel. Technol. 2, 20 (2026). https://doi.org/10.1038/s44459-026-00033-2
关键词: 蜂窝定位, 量子计算, 移动定位, 基于位置的服务, Grover 搜索