Clear Sky Science · zh
在非平稳激励下结合领域知识的强化学习控制用于非线性可调振动吸收器
为喧嚣世界打造更安静的机械
从高速列车到工厂压缩机,许多机械长期处于不断振动的环境中。这些振动浪费能量、加速零件磨损,并让我们的环境变得嘈杂和不舒适。本文探讨了一种新的减振方法,结合了智能橡胶材料与学习型计算程序,旨在构建能随条件变化自动调节的振动吸收器。
普通阻尼器为何不够
传统振动吸收器通常为一组窄范围条件调谐。当机械以单一、稳定的频率振动时它们表现良好,但现实工业环境远非稳定。温度升降、组件老化、湿度变化,振动模式本身可能在多种频率间徘徊。由智能材料(如可磁控的橡胶)构成的现代半主动吸收器可以实时改变刚度和阻尼。然而这些材料的行为复杂且会漂移,很难构建一个长时间保持精确的固定数学模型,大多数基于规则的控制器难以跟上变化。
教会阻尼器去学习
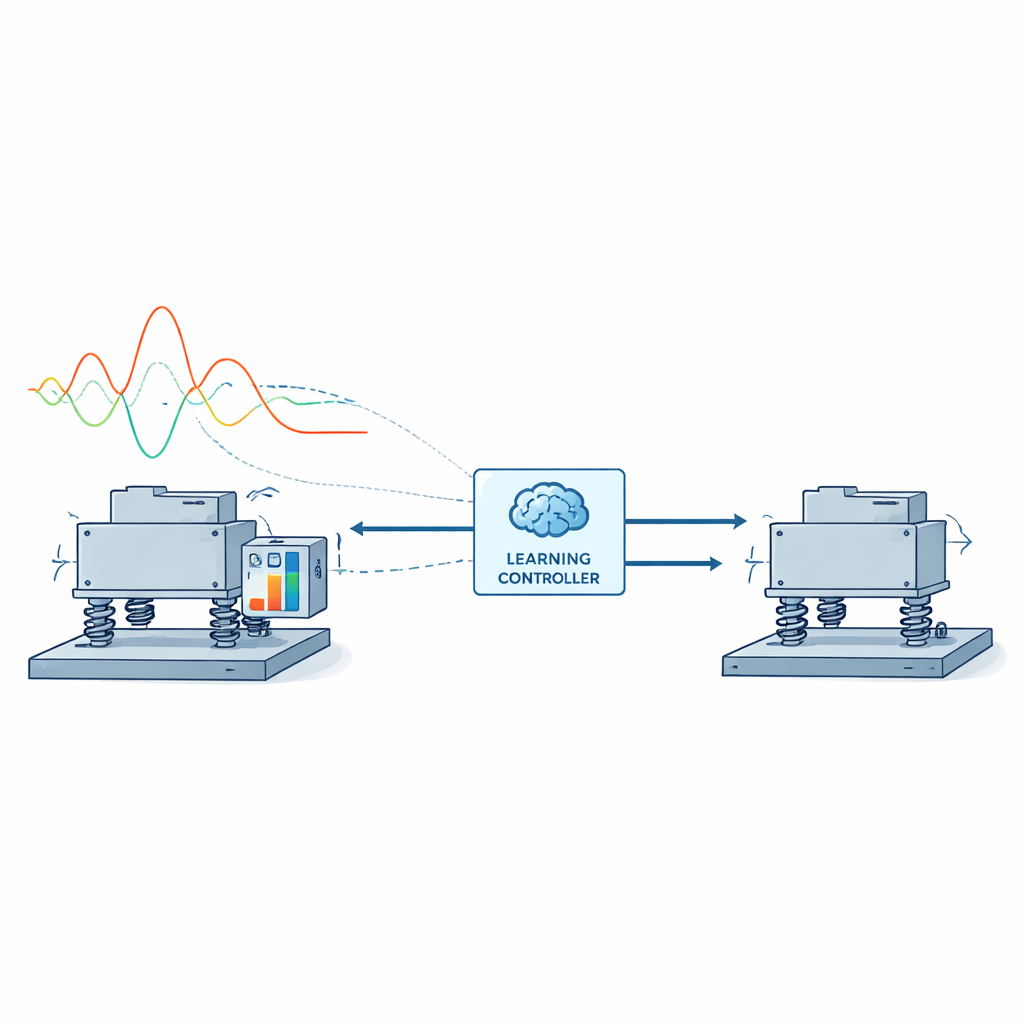
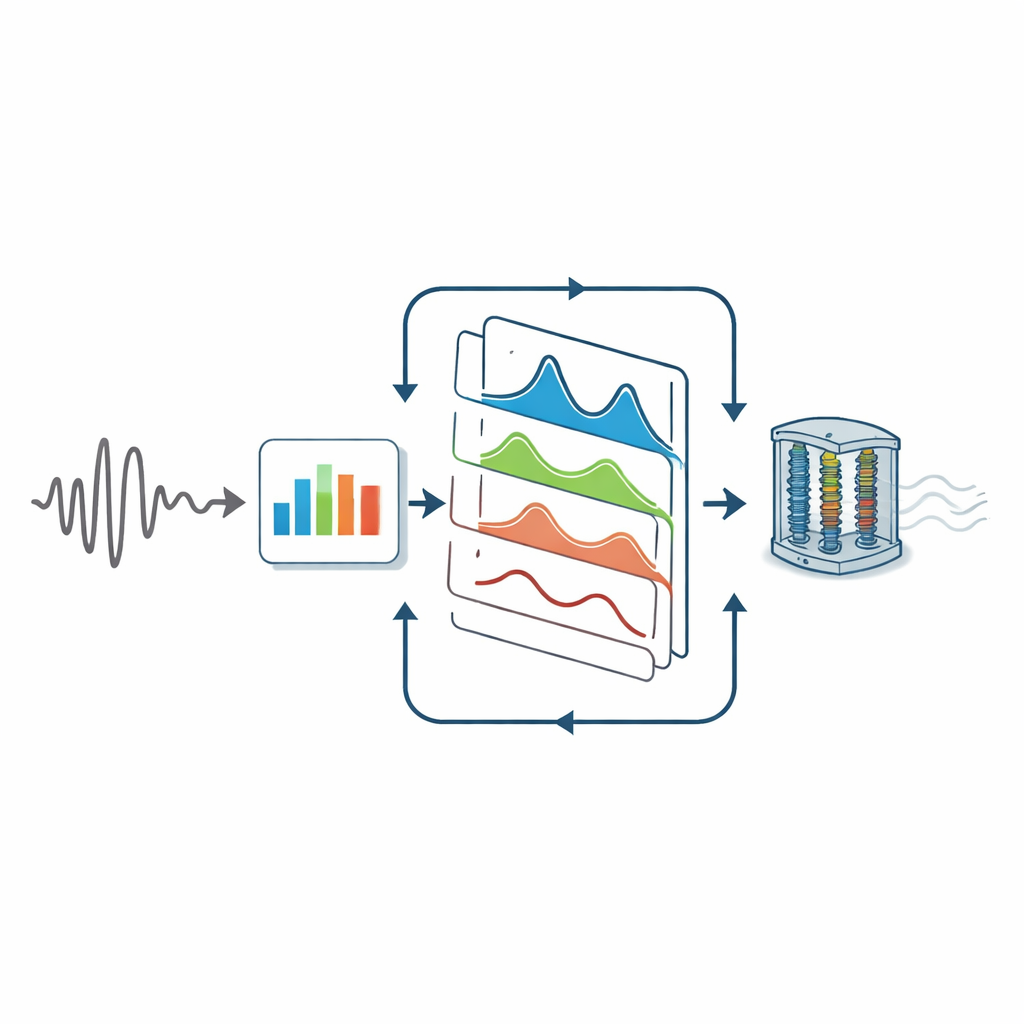
作者提出了不同的策略:与其事无巨细地建立吸收器及其环境的数学模型,不如让系统直接从振动数据中学习。他们使用人工智能的一个分支——强化学习,在该框架下控制器尝试不同操作,当振动减小时会获得“奖励”。这里的动作是施加在智能橡胶上的磁场强度,它改变材料的刚度和阻尼。控制器不直接处理原始时间信号,而是将测量转换为频谱——把振动能量在各个频率上的分布作为输入——从而用工程师描述振动行为时常用的“语言”进行推理。
用物理知识让学习更聪明
从所有可能的振动模式中天真地学习会耗费太多时间,因为真实机械面对无数频率和幅值的组合。为此,作者将基本振动物理嵌入到学习过程中。他们采用一个简单但强有力的理念:随时间测量的能量等于随频率测量的能量。这使得他们可以围绕总振动能量来定义学习问题,而不是针对信号中的每一次摆动。他们还侧重学习系统的频率响应——即吸收器在每种设置下如何影响各个频率的振动水平——而不是记忆对单一场景的响应。这样大大缩小了问题规模,使每次测量都成为一个快速、独立的学习片段,加快了训练速度,同时不依赖任何详细的材料模型。
用智能橡胶的真实世界测试
为了验证该方法的实际效果,研究人员在一个真实系统上进行了测试:线性压缩机连接到一块磁流变弹性体(即含铁颗粒的橡胶,受磁场时变硬)。控制器从传感器观察振动,对磁场进行八个离散级别的调整,并更新其对吸收器行为的内部描述。随着时间推移,它以很高的精度学到了系统的真实响应,尽管橡胶的刚度在几天运行中缓慢漂移。在由多个频率组成且其频率与强度在数分钟内变化的复杂、时变振动模式下,学习型控制器相比无控制情况最多将振动能量降低了约58%,并几乎达到了通过穷尽测试所有固定设置所能获得的最佳表现。
对未来机械的意义
通俗地说,这项研究表明振动吸收器可以被“教会”去‘听’机器,理解它当前的振动状态,并在没有硬件详尽蓝图的情况下自我重调。通过将简单的物理直觉与学习算法结合,作者创造了一个既高效又具适应性的控制器,能够应对材料变化和复杂、现实世界的振动模式。这种方法可能促成车辆、工厂等场景中更加安静、寿命更长的机械设备,尤其是在传统手工设计的振动控制方法难以应对的复杂条件下。
引用: Park, JE., Kang, H. & Kim, YK. Domain knowledge-integrated reinforcement learning control of nonlinear tunable vibration absorber under nonstationary excitation. Sci Rep 16, 10849 (2026). https://doi.org/10.1038/s41598-026-45189-7
关键词: 振动控制, 智能材料, 强化学习, 自适应阻尼, 磁流变弹性体