Clear Sky Science · zh
适应性模糊逻辑算法在城市路口智能交通信号管理中的多场景评估
为什么更智能的交通信号很重要
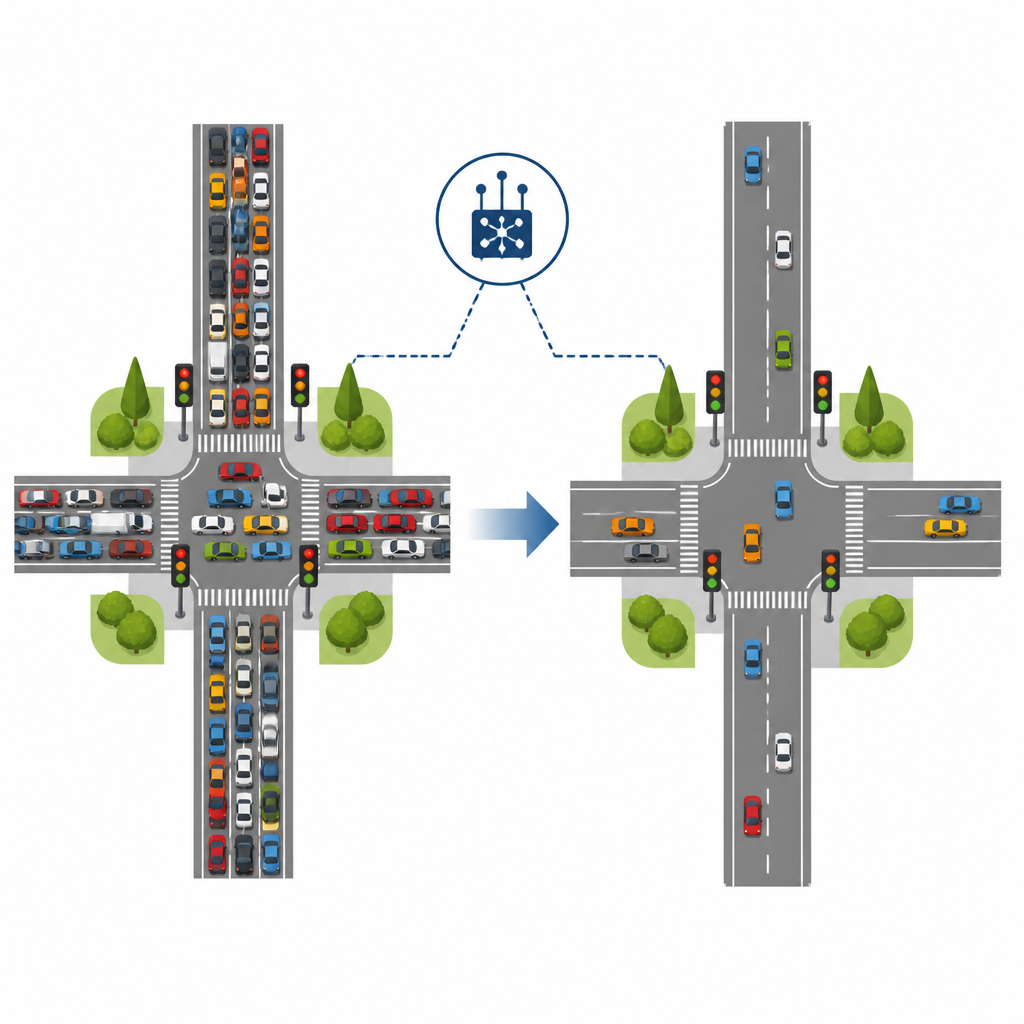
任何在没有对向来车的红灯前等过的人都能体会到僵化信号的浪费。该研究考察了由先进决策规则引导的更智能红绿灯如何在繁忙路口减少排队、缩短延误并降低燃料浪费。通过在多种不同交通情形下测试新的控制方法,研究人员展示了路口如何能够实时响应,而不是遵循固定脚本。
僵化信号时序的问题
大多数城市路口仍然采用重复同一模式的固定时序。这些方案易于设置和维护,但在车流不均、突然增加或方向转变时无法跟上。结果就是我们熟悉的情形:长队、时间浪费、额外油耗和更多尾气排放。即便是沿走廊调整时序的更高级系统,通常应对较慢且侧重单一目标(如延误),而未能平衡如排放等其他考量。作者认为,快速发展的城市路口需要能应对随机性、通行方向不平衡及信息不完全的控制器。
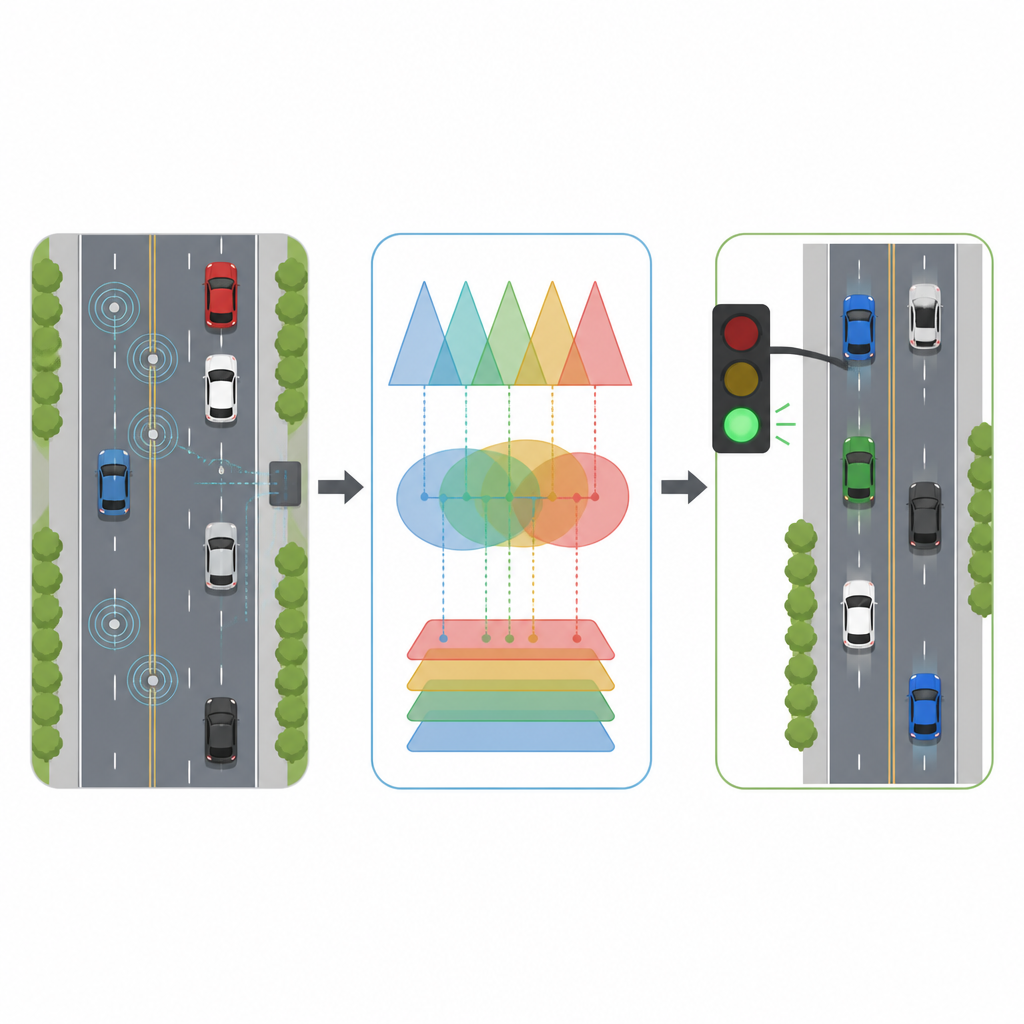
让信号“推理”交通的两种方式
研究测试了两类模糊逻辑控制器。模糊逻辑让机器以灰度而非严格的是或否规则进行推理,这在交通数据有噪声且条件快速变化时非常有用。第一种方法称为 MIFLA,它使控制器不仅能衡量某条规则看起来多么为真或为假,还能衡量不确定程度,从而鼓励谨慎调整而非剧烈摆动。第二种称为 MIT2FL,通过将队列长度和道路容量等关键输入视为区间而非单一数值,将不确定性直接纳入表示,并通过结构化计算仍能得出合理的绿灯时长。
将智能信号付诸测试
为公平比较这些方法,团队在 SUMO 交通仿真器中构建了一个详细的四向路口,并输入了九种不同的需求模式。这些模式从轻到极重流量不等,并从均衡到强烈偏向某些方向,模拟高峰期。虚拟道路上的感应线圈测量排队,控制器据此反复调整绿灯时长。作为基线使用的是一种称为改进韦伯(Modified Webster)的传统固定时序方法。对于每种场景,研究者跟踪平均队长、等待时间和超出畅通条件的额外行程时间,重复运行直至模式稳定。
路口性能能提升多少
在全部九种情景中,两种模糊控制器均优于固定时序方案,且在许多情况下幅度显著。在轻到中等需求下,它们将平均队列缩短约四分之一到一半,并大幅削减等待时间,有时超过70%。在这些较宽松的条件下,两种模糊方法表现相近,表明即便是适度的不确定性处理也有助益。然而在重负荷且不均衡的车流下,MIT2FL 更胜一筹。其基于区间的推理带来更平滑、更快速的队列缩减、较小的周期间波动以及比 MIFLA 更低的剩余拥堵。重要的是,这些增益每次决策仅需耗费几千分之一秒的计算时间,远在实际路口硬件能承受的范围内。
这对日常出行意味着什么
对日常司机而言,结论是交通信号不必成为简单的计时器。通过采用接受不确定性而非忽视它的决策规则,路口可以适应变化的车流量和不均衡来向,缩短队列与延误,同时限制燃料浪费与排放。研究表明,像 MIT2FL 这样的更先进模糊逻辑在车流繁重且偏向性强时提供最明显的好处,而这正是人们最感到拥堵的时刻。尽管研究在单一路口的仿真中进行,但它提出了一种可重复的方法来设计与比较智能控制器,指向未来城市网络中信号灯协同工作以使人员和货物流动更顺畅的方向。
引用: Shaheen, S., Qadri, S.S.S.M., Riaz, M.B. et al. A multi-scenario evaluation of adaptive Fuzzy Logic Algorithms for intelligent traffic signal management in Urban intersections. Sci Rep 16, 15273 (2026). https://doi.org/10.1038/s41598-026-44017-2
关键词: 自适应交通信号, 模糊逻辑控制, 城市路口, 交通仿真, 智慧城市