Clear Sky Science · zh
基于无人机影像与改进PointNext的田间烟草植株计叶新方法
从空中计叶为何重要
知道作物有多少叶片看起来也许是个小细节,但对于烟草种植者而言,它直接反映了植株健康与未来产量。目前,工人仍然需要走进田间手工统计叶片,这既慢又累且成本高,难以应对现代大规模种植。本研究展示了无人机、3D成像与人工智能如何协同工作,自动计数田间烟草植株的叶片,为施肥决策、产量预测和优良品种选育提供更快速、更精确的手段。
从无人机航拍到田间的三维视图
研究团队首先将无人机当作空中相机使用。他们在中国云南的烟草田上飞行一架商用四旋翼无人机,从不同高度和较陡的角度围绕感兴趣地块拍摄高分辨率照片。通过摄影测量软件,这些重叠影像被拼接成精细的三维植株模型。随后每株植株被提取为独立的三维点云,其中每个点代表茎、叶或周围杂物(如土壤和邻近植被)上的一个微小面片。此步骤将平面图片转化为丰富的三维描述,能够在叶片重叠或遮挡时仍识别出单片叶子。 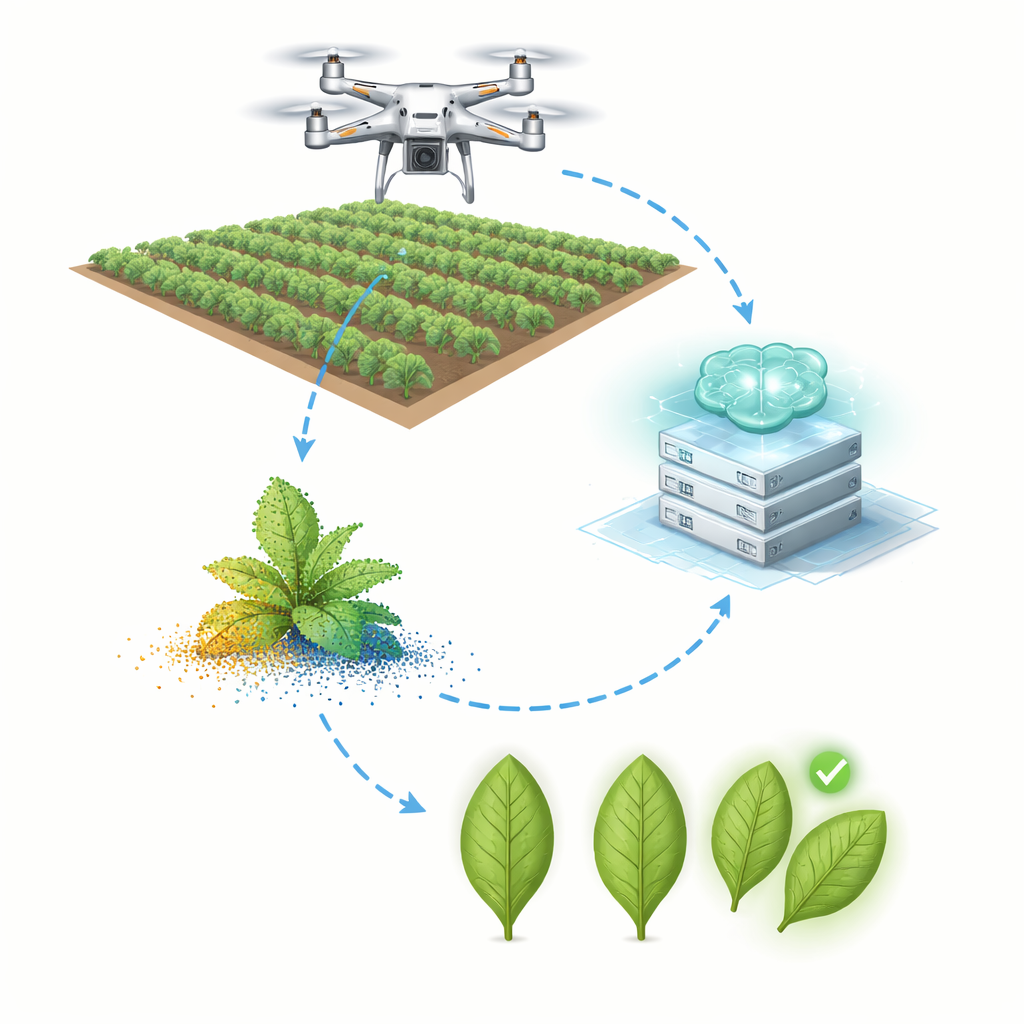
教计算机识别单个叶片
为了利用这些三维点云,团队构建了一个大规模且精心标注的数据集。他们收集了1000株单独植株模型,并对每个点手工标注为目标叶片、茎、其他植株或噪声。有了这些训练样本,他们将一种现代的三维深度学习网络PointNext改造为适应田间作物的版本,称为SRW-PointNext。该网络包含三项关键升级:一个注意力模块,帮助模型关注最具信息性的空间和颜色模式;一个改进的损失函数,避免大量叶片点主导而淹没稀有类别(如茎和背景);以及一个增强的输出头,在点云缺失或分布不均时更好地恢复细节。
把分割后的点云变成叶片计数
一旦SRW-PointNext学会给每个三维点打标签,模型就能将单株点云分为叶片和非叶片部分。但科学家仍需知道实际有多少片叶子。为此,他们采用了一种称为MeanShift的聚类方法。简单来说,该算法在三维空间中搜索叶片点的密集簇,每个密集簇对应一片叶子。算法的单一“带宽”参数控制点聚合的松紧。设置过小会把一片叶子分成多个虚假簇,从而高估叶数;设置过大则会把相邻叶片合并,低估叶数。通过精细调节该参数,研究者能够将分割出的叶片点合理地归为独立的单片叶子。 
方法的表现如何
为评估准确性,团队将自动计数结果与对230株田间植株的人工详细计数进行了比较。他们的流程——无人机成像、三维重建、SRW-PointNext分割,再到MeanShift聚类——达到了约92.6%的叶片计数准确率。改进后的网络在分割质量上也表现良好:约92%的精确率和76%的平均交并比(mIoU),优于多种流行的三维点云方法,如PointNet、PointNet++、RandLA-Net以及原始PointNext。值得注意的是,这种精度提升仅带来了适度的计算开销增加,表明该方法对大规模调查具有实用性。
对未来农业的意义
对非专业读者来说,核心信息很直白:通过将无人机、三维建模与改进的人工智能模型结合,研究者现在能在真实田块中几乎以人工同样可靠但速度更快、覆盖面积更大的方式计数烟草叶片。这把计叶工作从剪辑夹与田间步伐转向自动化、数据化的流程,可纳入数字化作物管理系统。尽管当前工作侧重于烟草的一个生长阶段并依赖于高质量的三维重建,但相同策略有望扩展到其他作物与不同季节。随着时间推移,这类工具可能成为农户的常规助手,帮助监测植株生长、优化投入并用更少的人工劳动挑选出表现更好的品种。
引用: Nan, D., Li, J., Liang, H. et al. A novel leaf counting method for field tobacco plants based on UAV imagery and an improved PointNext. Sci Rep 16, 11052 (2026). https://doi.org/10.1038/s41598-026-41365-x
关键词: 烟草表型测定, 无人机农业, 3D点云, 叶片计数, 农业中的深度学习