Clear Sky Science · zh
具有可调相互作用符号的机械滞回单元
会记住推拉的智能材料
我们周围的大多数物体在被推或弯曲后都会弹回,但有些材料会“记住”它们被如何处理。本文展示了如何从头构建这样的机械记忆,使用简单部件——小的旋转杆和弹簧——将它们连线起来以感知、存储并处理由推拉携带的信息。该工作把一个用于理解玻璃态和磁性体的抽象概念转化为面向未来智能材料和机械计算机的可操作设计方案。
微小的机械记忆位
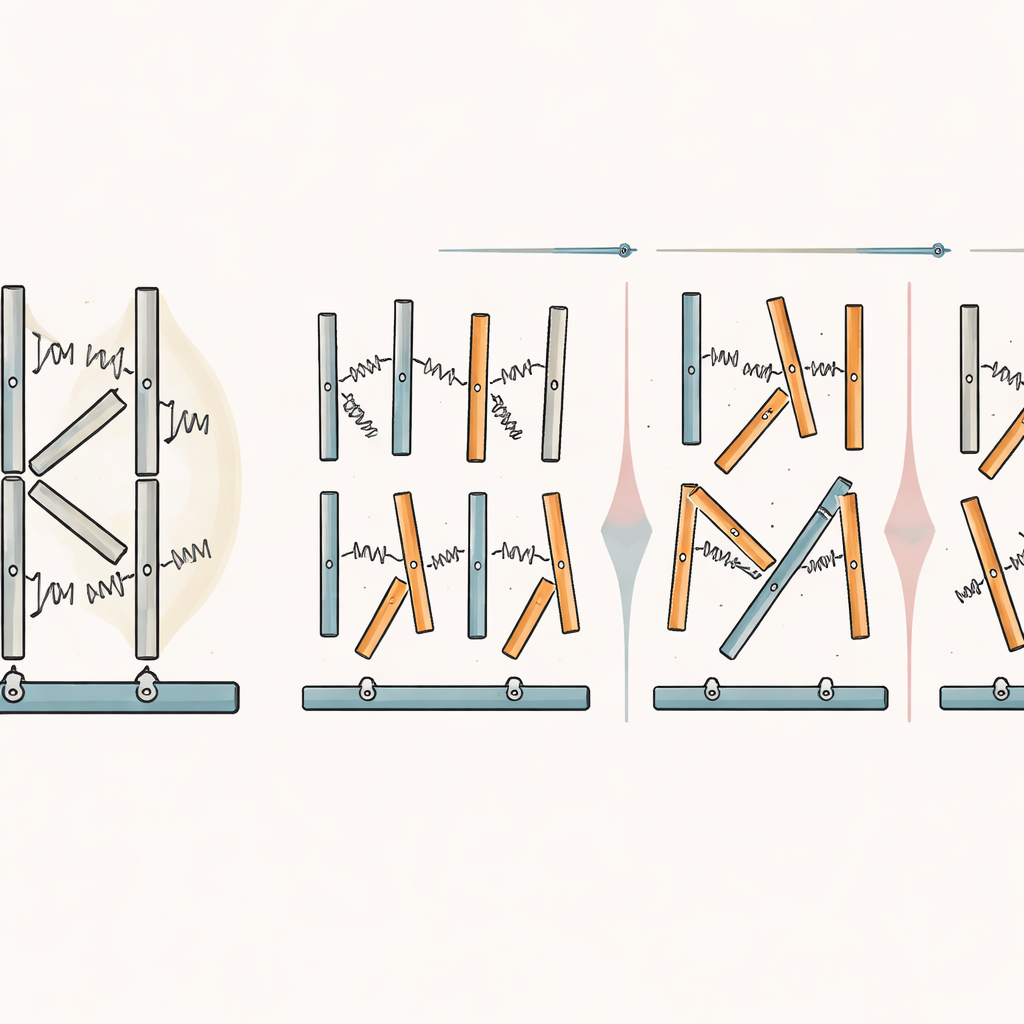
研究的核心是滞回单元(hysteron)的概念:一种可以处于两种稳定态之一、且仅在驱动信号越过特定阈值时才切换的基本单元。在磁体中,这些单元是其磁区的磁向翻转;在这里,作者用绕中心枢轴旋转并被两个物理挡块限制的刚性杆构建了一个大尺度的机械版本。每根杆通过弹簧连接到在前后移动以提供全局机械驱动的滑杆上。随着滑杆移动,杆会在允许的两个角度间突然跃迁,且只有当滑杆向相反方向移动足够远时才会跃回。这种跳跃性、依赖历史的响应正是滞后性的标志,使每根杆成为一个机械的记忆位。
让这些记忆位相互“对话”
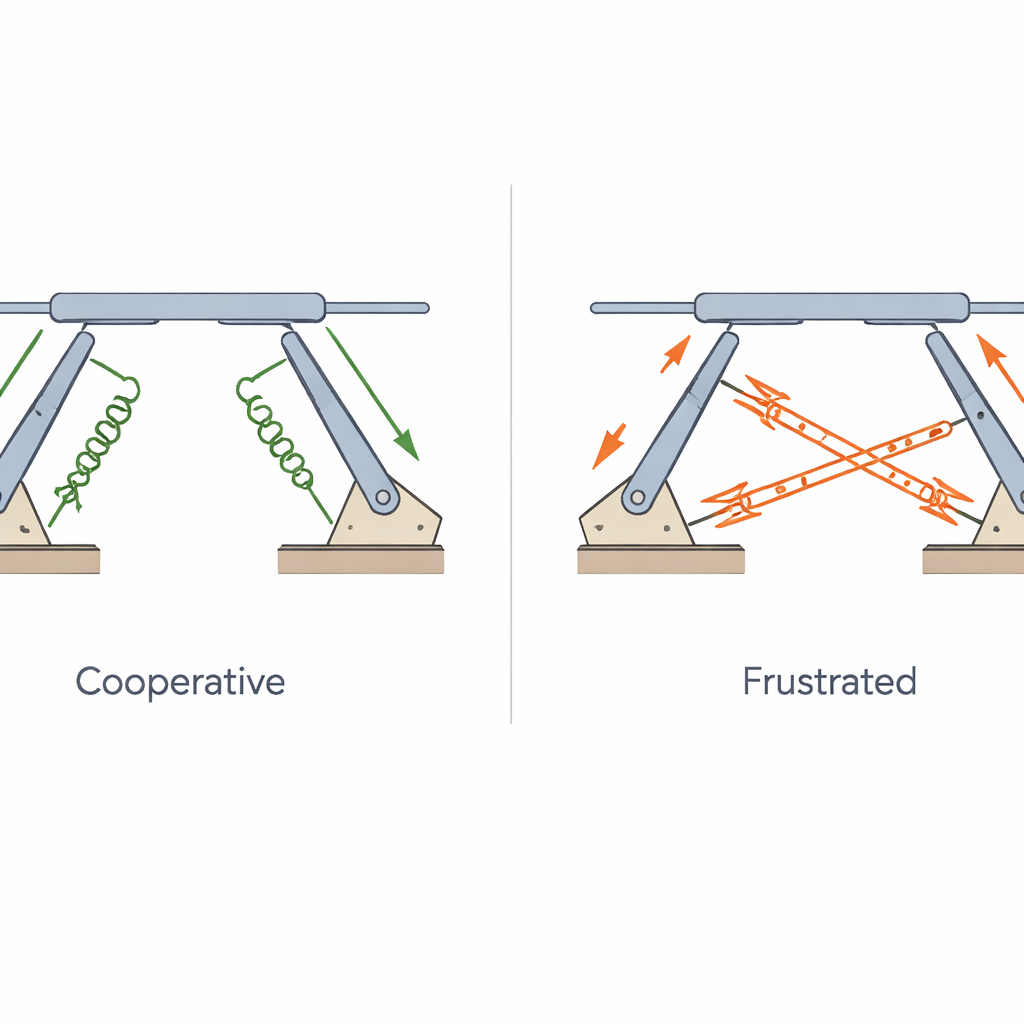
单个滞回单元本身是一个简单的存储单元;真正的威力在于多个单元相互作用时才显现。为此,作者在两根旋转杆之间安装额外的弹簧,并将其固定在每根杆上精心选择的位置。当连接弹簧在两杆之间直线拉通时,两单元倾向于指向相同方向,类似于铁磁体中相邻自旋的行为。当弹簧交叉时,杆则倾向于指向相反方向,类似于反铁磁体。通过改变耦合弹簧沿杆的连接位置,这种偏好强度可以连续调节,甚至可以设计出一种微妙的非对称效应——例如一根杆对其伙伴的影响比被其伙伴影响更强。
从几何到行为的设计映射
为了将其变成真正的设计平台,论文建立了一个数学描述,将简单的几何选择——杆长、与挡块的角度、弹簧位置和自由长度——与滞回单元的切换阈值和相互影响联系起来。通过平衡驱动弹簧和耦合弹簧产生的力矩,作者推导出公式来预测每根杆在其他所有杆状态下何时会翻转。在某些极限下,这些关系简化为一种清晰、近乎教科书式的形式:相互作用是成对的、线性的,并且可控其符号和强度。几何与逻辑之间的这座桥梁让实验者能够通过调整台面装置上的螺丝和支座来设定期望行为,而不必完全靠反复试验摸索。
能闩锁与计数的机械电路
基于这张设计映射,作者展示了若干小型“机械电路”来执行可识别的信息处理任务。通过两个强烈受挫且不对称的相互作用,系统实现了一个闩锁:一段适度的推动序列将一根杆翻入一个新状态,该状态在驱动返回零后仍保持不变,只有更大的序列才能将其复位——这是记忆的重要组成部分,故意违背系统沿原路回溯的通常规则。具有交替偏好的多滞回单元链表现为机械计数器,其中有序区域之间移动的边界沿链向下行进,每个驱动周期前进一步并记录系统被摇动的次数。经过精细调谐的四单元相互作用排列甚至可以区分奇数和偶数个周期,仅通过机械运动执行简单的模二运算。
这对未来智能材料为何重要
总之,该工作表明,许多在无序材料中观察到的复杂、依赖历史的行为可以用单一、可重构的机械构件复制并有目的地工程化。与其为每项任务从头设计新结构,不如用同一平台通过重新调节来实现闩锁、计数、将模拟输入转换为数字模式或跟随复杂状态序列。这指向了一类模糊了结构与计算边界的材料与机制:不仅能承载载荷,还能记录使用方式并以可编程的方式响应,为软体机器人、自适应装置和无需电子器件即可学习的物理系统开辟了新可能性。
引用: Paulsen, J.D. Mechanical hysterons with tunable interactions of general sign. Nat Commun 17, 2799 (2026). https://doi.org/10.1038/s41467-026-70913-2
关键词: 机械记忆, 滞后性, 机械超材料, 可编程物质, 机械计算