Clear Sky Science · zh
纳米尺度的机器人清洁器
在细菌海洋中的微小清洁器
想象一台小到能在一滴水中游动并圈住单个细菌而不伤害它们的吸尘器。本文展示了这样的装置:光驱动的微纳米机器人,其尺寸小于单个细菌细胞,可以被高精度操控以收集、运输并释放活体微生物。这些纳米级“机器人清洁器”预示着未来用于温和医学处理、芯片化实验室设备以及在复杂流体中做超局域感测的工具。
光如何推动微小机器
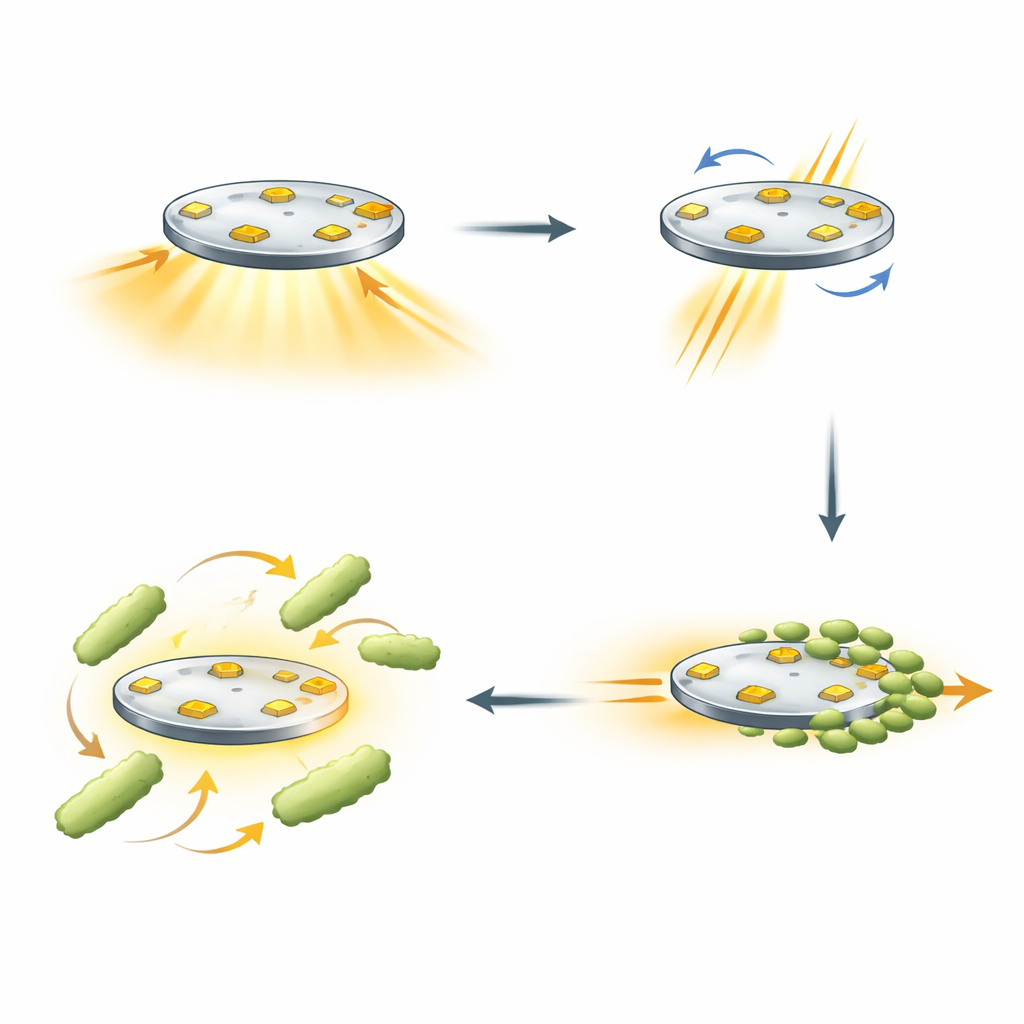
当光照射到极小的物体上时,会传递一股微小的动量——像是一阵无形乒乓球的细雨。作者利用特别布置的金属结构将这种效应放大,这些结构像微型天线。在红外激光光照下,这些天线会朝一个方向比另一个方向更强地散射光。散射不平衡产生净推力,将微米尺度的圆盘推着在水中前进,使其成为由光驱动的自推进载体。由于圆盘质量极小,即便是微小的光学力也足以产生意外的高速度,达到每秒数十微米。
在颤动的世界中保持航向
在如此微小的尺度上,水表现得像一个不断抖动的浴缸,随机的热激振本来会任意旋转小物体。为防止机器人翻滚,研究者在设计中加入了自稳功能。圆盘上的附加金属杆会在入射光具有偏好方向时感受到转矩。这种转矩会自然将机器人沿光的偏振轴对齐,就像风向标在稳定风中定向一样。线偏振光使机器人直线前进,而短促的圆偏振光脉冲则提供额外的扭矩,用以在分岔处选择左转或右转。通过简单地按时间序列切换这些光态,团队在不移动激光光斑的情况下绘出矩形、螺旋甚至字母形的路径。
用温和的热效应围捕细菌
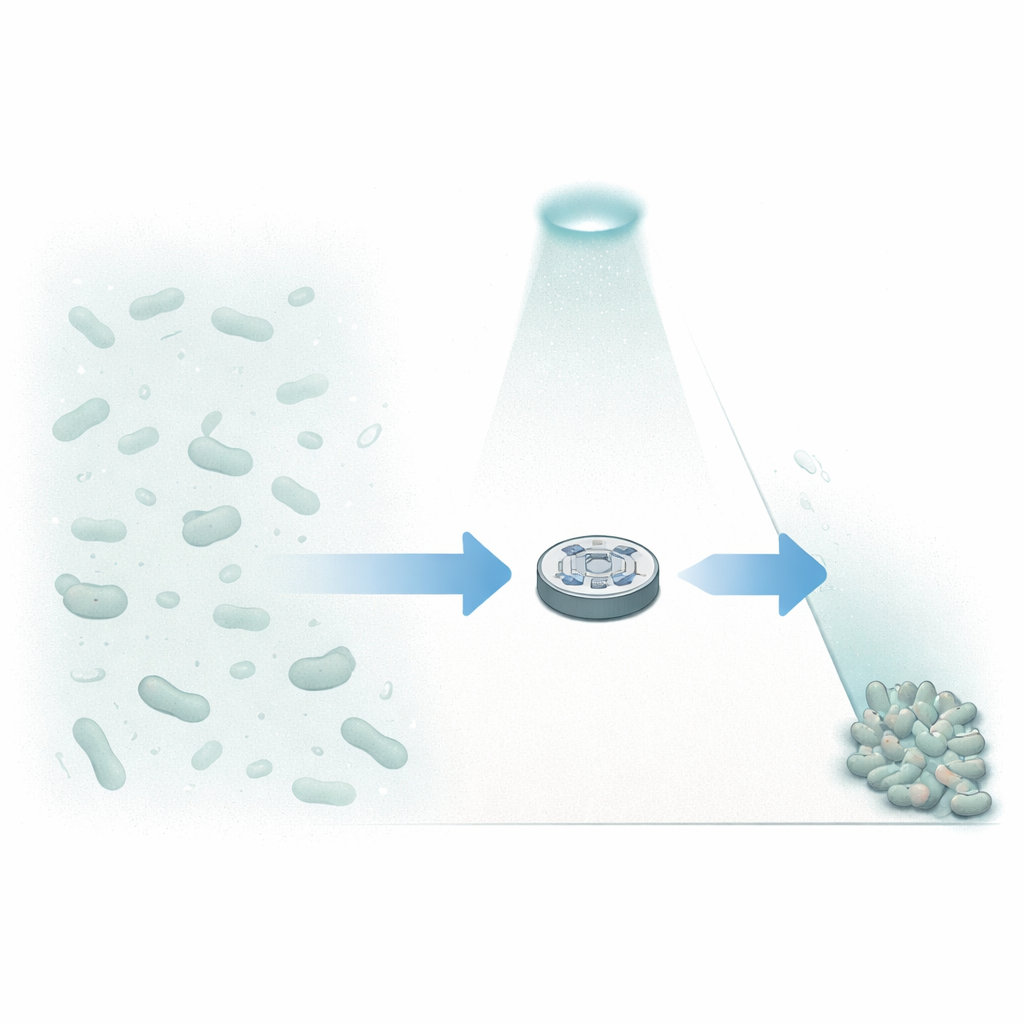
除了优雅的运动控制外,这些机器人还能与活体微生物相互作用。金天线不仅散射光,还会使其周围局部升温几度。这种温和且高度局域的加热在水中产生温度梯度。许多生物颗粒,包括细菌,自然会沿着这样的梯度迁移,这一过程称为热泳。在实验中,不同形状的细菌被吸引到机器人附近,形成围绕机器人的松散壳层。随着机器人移动,它会将这片微生物云沿路径拖拽,逐渐聚集更多细菌,直到形成一个致密、近似球状的簇,这个簇的质量可能是机器人自身的数百倍——但机器人仍然可控。
按需清扫与释放
由于细菌仅受光学力和温度效应约束,而不是粘在表面上,它们的集合是完全可逆的。关闭激光会消除光学力和温度梯度,细菌簇便会在微生物恢复随机运动时慢慢扩散。通过将机器人引导穿过某一区域,然后驶离并关闭光源,研究人员演示了如何将原本拥挤的溶液区域留下几乎空旷的状态。他们还展示了从流体不同高度收集细菌的能力,说明当配合简单的舞台运动以按需重新对准激光光斑时,单个机器人可以“扫荡”三维体积。
这些微小机器人为何重要
这项工作表明,精心设计的光学模式与纳米结构可以将简单的金-玻璃圆盘变成灵活、可编程的微生物尺度清洁器。没有运动机械部件,并且使用的激光强度适中,使温升保持在约十度以下,机器人可以描绘复杂路径、保持稳定定向,并一次性聚集或释放大量细菌。从长远看,类似装置可用于细胞分选、将药物输送到极小目标,或在微流体芯片或生物组织等敏感环境中巡逻——提供了一种操控微观世界的新型微创手段。
引用: Qin, J., Büchner, C., Wu, X. et al. A nanoscale robotic cleaner. Nat Commun 17, 3027 (2026). https://doi.org/10.1038/s41467-026-70685-9
关键词: 纳米机器人, 光驱动推进, 细菌操控, 等离子体天线, 热泳