Clear Sky Science · zh
由莫尔超晶格驱动的类生物水凝胶机器人,具可编程多功能性
能挤入人类无法到达之处的软体机器人
我们许多技术系统的隐蔽部位,从配电变压器到工业管线,常常在有人发现之前就已过热。对僵硬的机器而言,检查这些狭窄弯曲的空间很困难;对人类则更是不可能。本研究介绍了一种由富水凝胶制成的微小柔软机器人,它通过光来移动和感知,有点像谨慎地摸索珊瑚礁的海洋生物。此类装置将来可能在难以触及的部位巡检,悄然寻找危险的热点,在故障发生前预警。
以海葵为设计蓝本
研究人员从海葵获得灵感:海葵固定在基底上,并挥动触手以探索周围环境。他们的机器人称为类海葵光驱动水凝胶机器人,具有柔软的基座和若干直立触手。整个机体由温度敏感的水凝胶构成——这是一种在加热时收缩、冷却时再膨胀的凝胶状材料。通过对机器人不同部位照射不同颜色的光,研究团队可以让基座爬行、触手弯曲,使机器在没有任何刚性关节或传统电机的情况下既能移动又能“触摸”环境。
藏在凝胶内部的智能材料
该机器人核心处是一层薄如纸的涂层和由黑磷与二硫化钨构成的细小颗粒堆叠材料。当这两种超薄晶体以微小错位叠加时,会形成一种称为莫尔超晶格的重复图案。该图案会改变材料内部电子与振动的行为,使其在近红外波段特别擅长吸收光并将能量转换为热和电流。测试表明,这种莫尔结构在特定波长下加热迅速且高效,且在光照下产生强烈的电信号,性能优于各单一组分。
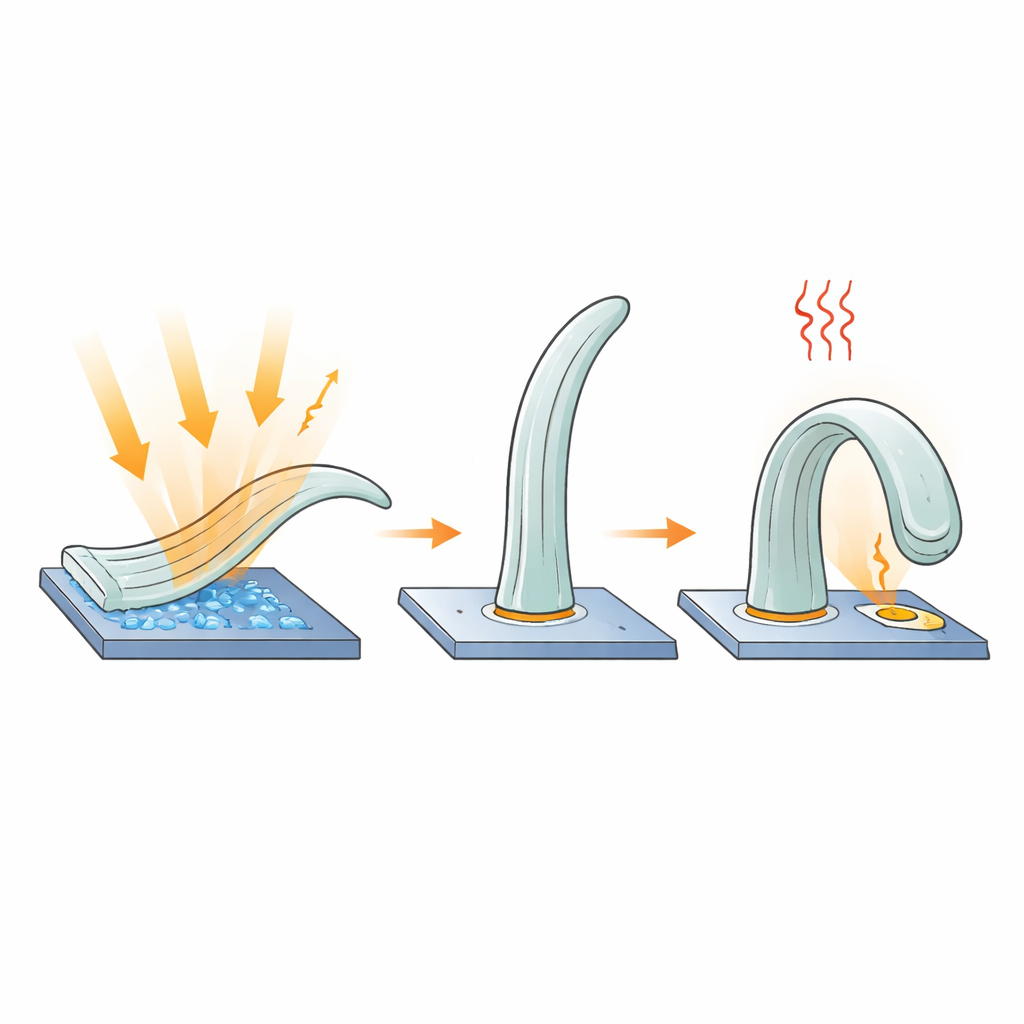
光驱动的运动与免接触热感知
团队将这种莫尔材料遍布于机器人基座并涂覆于每根触手表面。当红光照射基座一侧时,该区域轻微升温,导致该处凝胶收缩并弯曲。随着光的开关,这种弯曲与回复反复发生,底部摩擦将这个循环转化为缓慢的“尺蠖式”爬行。不同的光强和闪烁频率可调节机器人的移动速度。触手的行为则不同:当它们暴露于近红外光(类似过热部件发出的热辐射)时,会向下收缩。这一动作使得涂有莫尔层的触手尖端接触到微小金属电极,闭合电路,从而使光生电流可在机器人外部被测量。
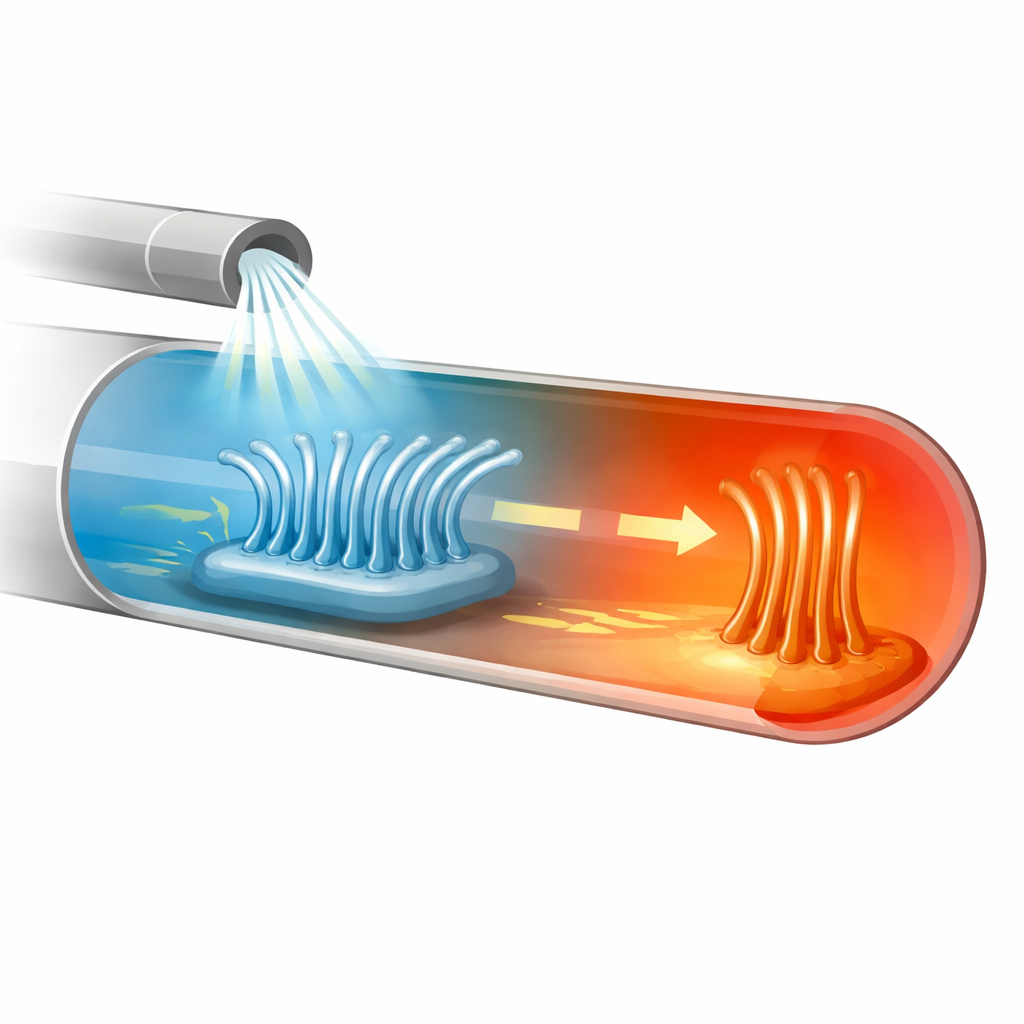
在狭窄设备内追踪热点
为展示其实际意义,研究人员将软体机器人置入一段弯曲的塑料管中,以模拟注油的变压器管道。通过用无害的红光驱动基座,他们将机器人沿管道引导前进。当触手经过一个人工设置的热点时,近红外辐射促使其弯曲并接触电极,发出明显的电脉冲。机器人能够在实用距离内区分正常与过热区域,并在多次加热—冷却循环后仅出现轻微性能下降。由于其柔软、窄小且高度可弯曲,它能够穿过会阻挡刚性检测工具的弯曲和狭窄通道。
面向未来软体机器的一般设计方案
除了这一具体装置,作者还概述了一种更广泛的设计策略:将软体机器人视作若干模块——将光转化为运动的驱动单元、将光或热转化为信号的感知单元,以及将一切连接在一起的柔性凝胶机体。通过选择不同的层状二维材料并调节其莫尔图案,工程师可以替换出对其他光色或其他环境线索(如化学物质或生物标记)有响应的模块。简言之,该研究展示了如何用相同的嵌入材料构建既能移动又能感知的光控软体机器,为温和且智能的机器人守护我们工程世界的隐蔽角落开辟了道路。
引用: Zhang, L., Zhang, Y., Li, X. et al. Moiré superlattice-driven bionic hydrogel robot with programmable multifunctionality. Nat Commun 17, 2889 (2026). https://doi.org/10.1038/s41467-026-69611-w
关键词: 软体机器人, 水凝胶机器人, 莫尔材料, 红外感应, 过热检测