Clear Sky Science · zh
嵌入液晶全息术的一体化光学交互软机器人
会“用光交流”的软体机器人
设想一种柔软的、可挤压的机器人,它不仅在受到光照时会运动,还能通过隐藏的光学图案“告诉”你它想要做的事情。本研究介绍了这样一个系统:软体机器人可以用光来存储、加密并发送指令,同时执行复杂的动作。这项工作指向未来更像生物体的机器——它们拥有由智能材料构成的“神经系统”,而非电线和芯片。 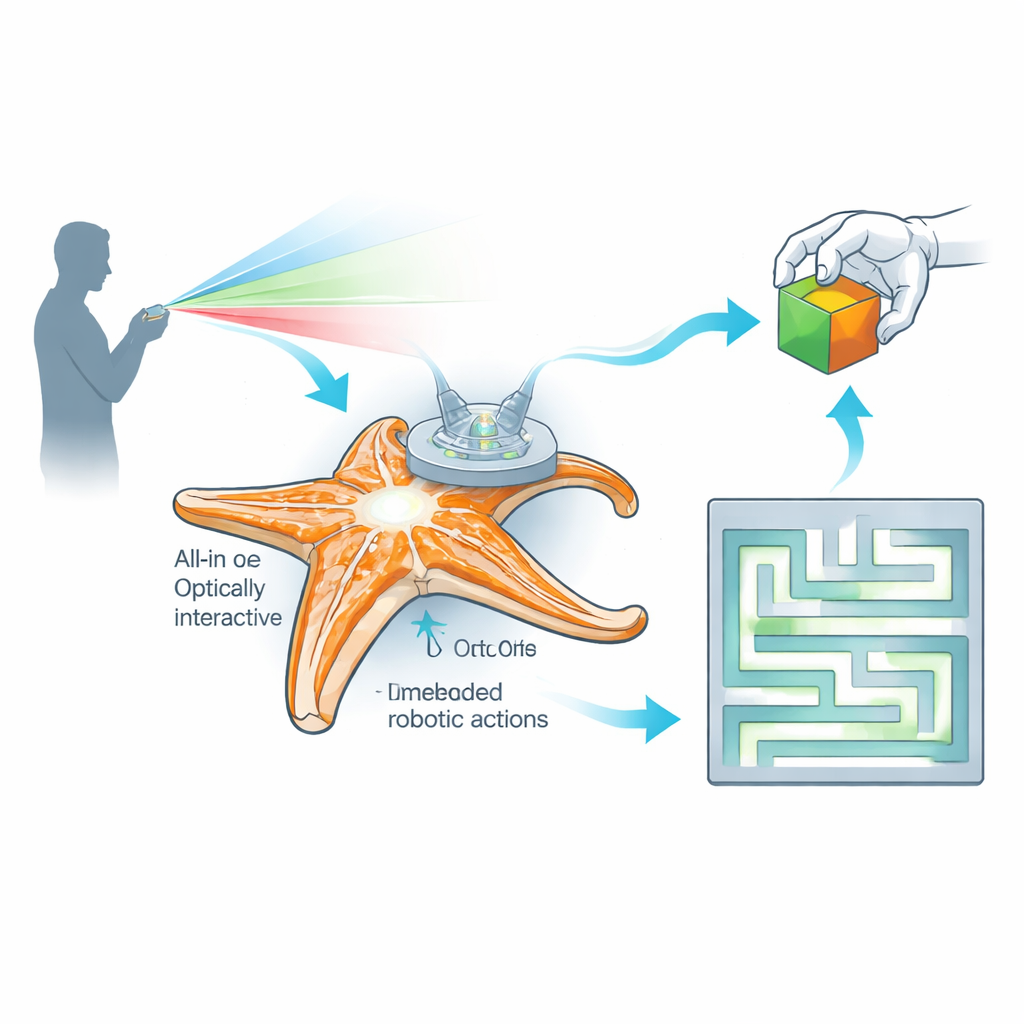
为什么软体机器人需要内建“大脑”
当今大多数软体机器人依赖笨重的外部电子设备或人为判断来决定执行哪些任务及如何执行。它们或许柔韧且触感安全,但缺乏像动物大脑那样能够存储与管理信息的内部中心。这意味着它们无法独立地引导操作者完成任务,或在自身内部安全地保存任务计划。作者们着力创建一种将信息与运动紧密耦合的软体机器人,使得指令、反馈和动作都在一个全软的框架内处理。
两种特殊材料的协同工作
关键在于精心设计的两种薄膜配对:对光高度响应的液晶网络,以及对湿度敏感、取自蚕茧的蛋白质丝素。将这两层叠为双层结构后,在光照或湿度作用下它们会朝相反方向弯曲,使机器人能够卷曲、盘绕、扭动,甚至形成三维形状。通过选择薄膜厚度、切割方向以及如何拼接各段,研究者可以编程出从简单弯曲条到螺旋弹簧和复杂多段结构的多种运动。这种组合克服了单一材料的局限,产出具有多自由度且在重复使用下长期稳定的软体部件。
隐藏在软质材料中的全息图
除了运动,同一液晶材料还在显微尺度上被图案化以存储全息图——在以正确方式照明时会显现的基于光的图像。利用数字微镜系统,团队将复杂图案写入液晶分子的取向,然后将其转化为固体薄膜,点亮时能投射出清晰的全息图像。与此同时,丝素层掺入了在近红外不可见光激发下会发光的特殊纳米颗粒。通过在丝素中混合蓝、绿、黄和红的上转换粒子,研究者制备出在保持力学性能的同时可发出不同色彩的柔性薄膜。液晶全息与发光丝素联合构成一个全光学的信息单元,能够在若干层面上编码、隐藏与显示指令。 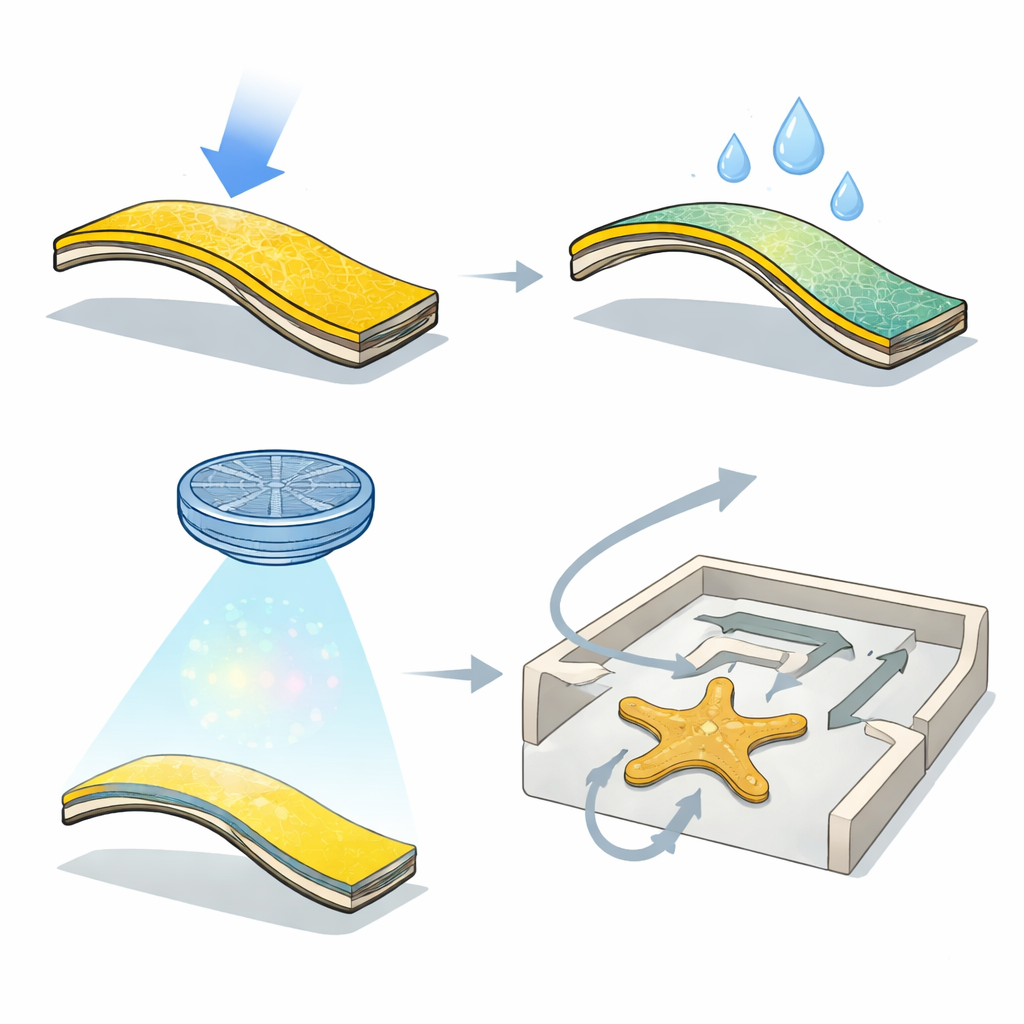
遵循隐藏光指令的软机器
为展示其实用性,团队制造了两个演示型机器人。第一个是一个四臂抓取器,其底座携带全息薄膜。当用特定光模式照射时,底座会投射出描述任务的图像——例如,抓取蓝色方块并将其放入对应的盒中。操作者解读该投影后,用另一束光加热双层臂,使其张开和闭合以按需抓取、举起、移动并释放物体。在第二个示例中,一个微小的四足行走器配有一个花瓣状外壳,外壳上有带颜色的丝素花瓣和中央的全息圆盘。水蒸气首先使花朵张开,显露隐藏的全息图。圆偏振光随后揭示出四种不同的全息图像,每种图像与在红外激发下呈现特定花瓣颜色相对应。只有某一特定颜色序列对应迷宫中的正确路径。被解码后,操作者通过选择性地照射其腿部,驱动行走器向不同方向爬行,使其沿规定路线逃出迷宫。
对未来智能工具的意义
简而言之,这项工作展示了如何用响应性材料为软体机器人同时赋予“身体”和“记忆”。光作为通用语言:它用于书写与隐藏指令,让机器人向用户显示指令,并为执行任务的运动提供能量。由于构建模块——液晶聚合物与丝素——与生物系统相容,作者们设想未来的医疗微机器人可以在体内通过光学方式引导和认证,即便在传统电子设备难以发挥作用的环境中也能运行。尽管真正的应用还需更深的光穿透能力和材料进一步改良,这项研究为通过内建于柔性结构中的基于光的“对话”来思考与行动的软机器指明了新方向。
引用: Zhang, ZC., Wei, Y., Wang, ZY. et al. All-in-one optically interactive soft robots with embedded liquid crystal holography. Light Sci Appl 15, 219 (2026). https://doi.org/10.1038/s41377-026-02287-5
关键词: 软体机器人, 全息术, 液晶, 丝蛋白生物材料, 光控驱动
在研究团队网站查看更多: https://light.nju.edu.cn/index