Clear Sky Science · ru
Встроенное доменное знание для автономной навигации с подавлением возмущений в морских суднах
Почему важно управлять кораблями в штормовую погоду
Современная наука и промышленность всё сильнее зависят от роботизированных кораблей и подводных дронов для инспекции кабелей, обслуживания офшорных ветропарков и исследования глубокого океана. Однако эти аппараты вынуждены работать в беспокойном море, где ветер, волны и течения постоянно скидывают их с курса. В этой статье представлен новый подход, помогающий морским роботам держать курс даже в самых неблагоприятных морских условиях, что обещает более безопасные операции, меньшие затраты на обслуживание и более надёжные данные о состоянии мировых вод.
Океан как движущийся полигон препятствий
Сегодняшние морские задачи варьируются от съёмки антарктических ледяных шельфов до проверки состояния подводных кабелей, по которым идёт глобальный интернет-трафик. Во всех этих работах судно или подводный аппарат должен следовать заданной траектории с метровой точностью, иногда прорываясь между плотными конструкциями, такими как основания ветряных турбин. Проблема в том, что океан — это не спокойный испытательный бассейн. Порывы ветра, крутые волны и меняющиеся течения сдвигают аппараты вбок, закручивают их и замедляют. Традиционные методы управления предполагают, что инженеры могут точно выписать уравнения движения судна, но в реальном море эти уравнения неполны и быстро устаревают. В результате возникают большие ошибки навигации и, в крайних случаях, аварии.
Обучение машин языку волн
Исследователи в этой работе пошли иным путём: вместо опоры на совершенную математическую модель они позволяют системе обучения наблюдать за поведением моря и реагировать в реальном времени. В основе подхода лежит специальная форма нейронной сети, называемая Специализированной сетью Колмогорова–Арнольда, или SKAN. В отличие от типичного «чёрного ящика», SKAN создаётся с учётом ритмов океана. Разработчики подают в неё простые волнообразные функции, которые фиксируют то, как ветер, волны и течения обычно меняются со временем. Эти строительные блоки действуют как набор музыкальных нот, из которых сеть может «сочинять» сложную «мелодию» реальных возмущений, ускоряя обучение и сокращая объём необходимых данных.
Партнёр по управлению, мыслящий на основе опыта
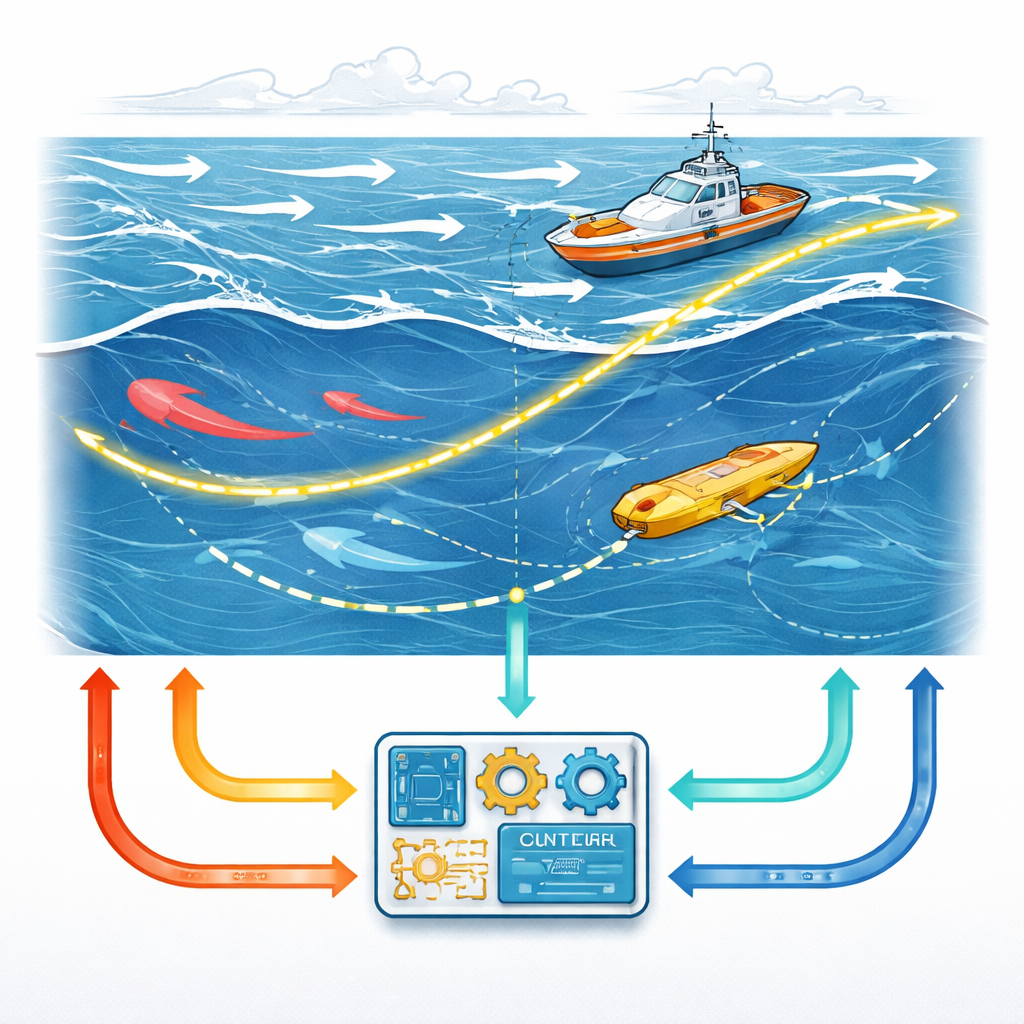
Рамочная структура объединяет два основных компонента: наблюдатель возмущений и бесмодельный контроллер. Наблюдатель использует сеть SKAN для оценки невидимых толчков и тянущих сил, действующих на судно в нескольких направлениях одновременно. В каждый момент он анализирует недавнюю информацию о движении и состоянии моря и выдаёт наилучшее приближение текущих сил и моментов поворота. Контроллер, обученный на данных, а не на вручную созданной модели, решает, как регулировать тягу и руление. Важный момент: он получает и состояние судна, и оценки возмущений от наблюдателя, что позволяет гасить большую часть морских помех до того, как они перерастут в крупные ошибки. Чтобы сделать обучение эффективным, авторы разрезают записанные данные о движении на множество пересекающихся фрагментов, фактически умножая число полезных обучающих примеров без необходимости длительных и рискованных испытаний в море.
Испытания виртуальных кораблей и подводных аппаратов
Чтобы проверить работоспособность идеи, команда создала подробные симуляции офшорного ветропарка — особенно жёсткого полигона, где течения огибают опоры, волны мелкие и тревожные, а безопасные зазоры малы. Они направили виртуальное надводное судно по шести маршрутам инспекции кабелей, подвергая его реалистичным значениям ветра, высоты волн и картинам течений. По сравнению с популярным контроллером глубокого подкрепления их система на базе SKAN сократила средние ошибки следования по траектории примерно на одну пятую и сохраняла устойчивость судна даже при сильных порывах и боковых волнах. Затем они протестировали автономный подводный аппарат, которому было поручено описывать траектории вокруг оснований ветряных турбин по спиральным и гантелеобразным трекам. И вновь метод сохранял отклонения маленькими и движения плавными, даже когда подводные течения и изменения глубины пытались сдвинуть аппарат с курса.
Больше обучения при меньшем объёме данных
Исследование также оценивало, насколько хорошо сам наблюдатель возмущений работает. Обучаясь на дополненных фрагментах данных о движении, наблюдатель на базе SKAN смог достичь примерно 90% точности по сравнению с обучением на полном исходном наборе данных, хотя фактически было расширено лишь десятая часть исходных сырых данных. Это означает, что систему можно подготовить с гораздо меньшим числом примеров — важное преимущество, когда сбор реальных данных с кораблей и подводных аппаратов дорог и занимает много времени. При сильных ветре, волнах и течениях контроллер, оснащённый таким наблюдателем, сохранял ошибки следования плотными и сконцентрированными, тогда как система без компенсации демонстрировала значительно большие и разбросанные отклонения.
Более безопасные и умные рейсы впереди
Проще говоря, авторы показывают, что сочетая человеческие знания о поведении моря с машинным обучением, требовательным к данным, можно точнее вести морских роботов в тяжёлых условиях, не моделируя дотошно каждую физическую деталь. Их структура превращает беспорядочное движение океана в полезную информацию, на которую контроллер может быстро реагировать, обеспечивая более плавные и безопасные траектории как для надводных судов, так и для подводных аппаратов. Хотя полученные результаты пока основаны на симуляциях, те же идеи могут помочь будущим флотам морских роботов — и даже летающим дронам и автономным автомобилям — справляться с непредсказуемой средой, опираясь на меньшее количество данных и более простые модели.
Цитирование: Zhao, Y., Ma, Y., Zhu, G. et al. Domain knowledge embedded anti-disturbance autonomous navigation for marine vehicles. Commun Eng 5, 82 (2026). https://doi.org/10.1038/s44172-026-00666-9
Ключевые слова: автономные морские суда, океанские возмущения, управление с помощью машинного обучения, офшорные ветропарки, следование по маршруту