Clear Sky Science · ru
Флуктуации задержек «конец‑до‑конца» в низколатентных системах Интернета вещей на БПЛА с использованием WebRTC в городской среде
Почему важны секундные каналы передачи данных для полётов
По мере того как города становятся «умнее», они всё больше полагаются на мелкие датчики и летающих роботов для наблюдения за улицами, контроля качества воздуха и помощи в управлении дорожным движением. Для многих таких задач собранная информация должна поступать практически мгновенно и с равномерной задержкой, чтобы программное обеспечение и операторы могли реагировать в реальном времени. В этой работе исследуется, способен ли веб‑стек WebRTC, запущенный на беспилотнике, укомплектованном сенсорами, обеспечивать столь же стабильный и сверхбыстрый поток данных в загруженной городской беспроводной среде.

Летающие помощники над цифровым городом
Авторы сосредотачиваются на беспилотных летательных аппаратах (БПЛА), выполняющих роль воздушных платформ с датчиками в умных городах. Такие дроны могут нести камеры и экологические сенсоры для мониторинга загрязнений, погоды, трафика или инфраструктуры, а также поддерживать продвинутые концепции вроде цифровых двойников и пограничных вычислений. Многие из этих приложений требуют передачи данных от дрона на землю за всего несколько тысячных долей секунды и чтобы почти каждая запись приходила вовремя, а не только в среднем. Комбинация малой задержки и малых флуктуаций задержки, известная как низкий джиттер, особенно сложна, когда дрон перемещается между зданиями и точками доступа.
Веб‑технология за штурвалом
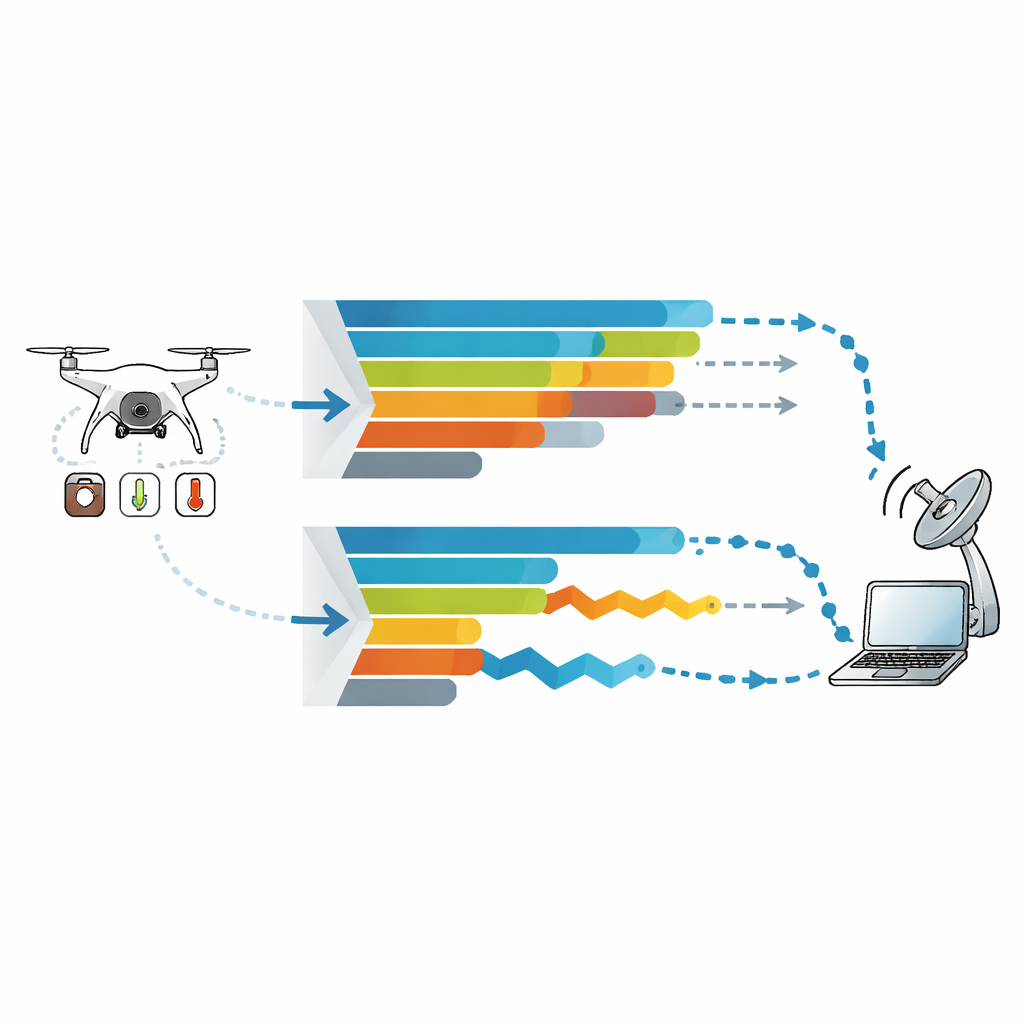
Вместо разработки полностью новой системы связи исследователи опираются на Web Real‑Time Communications (WebRTC) — семейство технологий, которое обеспечивает многие видеозвонки в браузере. В их конфигурации небольшой компьютер на борту дрона собирает показания нескольких экологических датчиков и модуль позиционирования, упаковывает их в лёгкие MQTT‑сообщения и отправляет через «канал данных» WebRTC на наземную станцию. Этот воздушно‑наземный канал использует Wi‑Fi 5 — распространённый беспроводной стандарт, который при аккуратной настройке способен обеспечивать малые задержки. Для сравнения они также создают эталонную систему, где канал данных WebRTC заменён более традиционным веб‑соединением WebSocket, опирающимся на привычный транспортный протокол TCP.
Настоящие полёты на реальном кампусе
Чтобы проверить, насколько стабильна задержка на практике, команда проводит несколько полётов дрона над парковкой университета, окружённой зданиями, при разных погодных и сетевых нагрузках. Район покрыт несколькими точками доступа Wi‑Fi, поэтому по мере того как дрон выполняет маршрут на высоте около 15 метров, его радиосвязь переключается между точками доступа и между полностью беспроводными и смешанными проводно‑беспроводными путями. Каждые полсекунды дрон отправляет пакет из девяти показаний датчиков плюс метаданные; для каждого элемента данных исследователи прецизионно ставят временные метки при отправке и при приёме. На основе серий по 40 000 таких измерений на рейс они вычисляют стандартные статистики — размах, дисперсию и стандартное отклонение — чтобы количественно оценить, насколько колеблется задержка конец‑до‑конца.
Насколько «стабильно» достаточно?
Когда базовая связь Wi‑Fi не содержит ошибок, система на основе WebRTC демонстрирует удивительно стабильные временныe показатели: разброс задержек измеряется десятками микросекунд (миллионных долей секунды), что практически соответствует нулевому джиттеру на миллисекундной шкале, важной для инженеров. Это верно как на транспортном уровне, где пакеты первично прибывают, так и на логическом уровне канала внутри WebRTC. Даже если один пакет теряется и ретранслируется, временно растягивая одну задержку на несколько миллисекунд, общая картина времён остаётся очень стабильной после исключения этого редкого выброса. Напротив, эталонная система на основе WebSocket показывает значительно больший разброс — зачастую на порядки больше — то есть времена прихода пакетов плавают на протяжении многих миллисекунд даже при отсутствии ошибок передачи.
Внутренний механизм временных колебаний
Статья также исследует, откуда берутся оставшиеся флуктуации. Канал данных WebRTC использует транспортный протокол, который обычно не перемешивает пакеты, пришедшие слегка не в порядке; вместо этого он быстро передаёт их вверх по стеку. Любая перестановка, нужная для восстановления исходной последовательности, выполняется в буфере на более высоком уровне. В безошибочных запусках этот буфер добавляет лишь фиксированную, крошечную дополнительную задержку обработки, поэтому все статистические показатели джиттера выглядят по сути одинаково как при измерении на транспортном уровне, так и выше. Однако при редкой ретрансляции пакеты, пришедшие раньше, могут удерживаться в буфере, пока поздний пакет не догонит, что раздувает некоторые показатели джиттера на уровне логического канала. Авторы поэтому предупреждают об осторожности при включении строгой доставки в порядке очереди в WebRTC, если это не абсолютно необходимо приложению.
Что это значит для будущих умных городов
Для неспециалистов главный вывод в том, что исследователи показали практический способ превратить повседневные веб‑технологии в сверхстабильный канал передачи данных для летающих сенсоров над городом. Их полевые эксперименты указывают, что БПЛА, использующий канал данных WebRTC поверх тщательно управляемой сети Wi‑Fi 5, может доставлять показания сенсоров с почти нулевой временной «качкой», даже двигаясь по сложному городскому радиоландшафту. По сравнению с более традиционным веб‑подходом, конфигурация на базе WebRTC сохраняет задержки не только короткими, но и постоянными, что критично для задач вроде точной навигации, мониторинга и управления в реальном времени. Это позволяет предположить, что будущие сервисы умных городов смогут опираться на широко распространённые веб‑стандарты, а не на полностью новые протоколы, чтобы удовлетворять одни из самых жёстких требований к надёжной и низко‑джиттерной связи с воздуха.
Цитирование: Chodorek, A., Chodorek, R.R. & Sitek, P. Fluctuations of end-to-end delays in low-latency WebRTC-based UAV-borne internet of things operating in an urban environment. Sci Rep 16, 11165 (2026). https://doi.org/10.1038/s41598-026-41558-4
Ключевые слова: умные города, беспилотные летательные аппараты, низколатентная связь, канал данных WebRTC, интернет вещей