Clear Sky Science · en
Fluctuations of end-to-end delays in low-latency WebRTC-based UAV-borne internet of things operating in an urban environment
Why split-second flying data links matter
As cities grow smarter, they increasingly depend on tiny sensors and flying robots to watch the streets, check the air and help manage traffic. For many of these tasks, the information they collect must arrive almost instantly and with steady timing, so that software and human operators can react in real time. This paper explores whether a web technology called WebRTC, running on a drone packed with sensors, can deliver that kind of rock-steady, ultra-fast data stream in a busy urban wireless environment.

Flying helpers over a digital city
The authors focus on unmanned aerial vehicles (UAVs) acting as airborne sensor platforms in smart cities. Such drones can carry cameras and environmental sensors to monitor pollution, weather, traffic or infrastructure, and can even support advanced concepts like digital twins and edge computing. Many of these applications demand that data move from drone to ground in just a few thousandths of a second, and that almost every data point arrives on time, not just on average. That combination of low delay and low fluctuation in delay, known as low jitter, is especially challenging when the drone is moving between buildings and wireless access points.
A web technology in the pilot seat
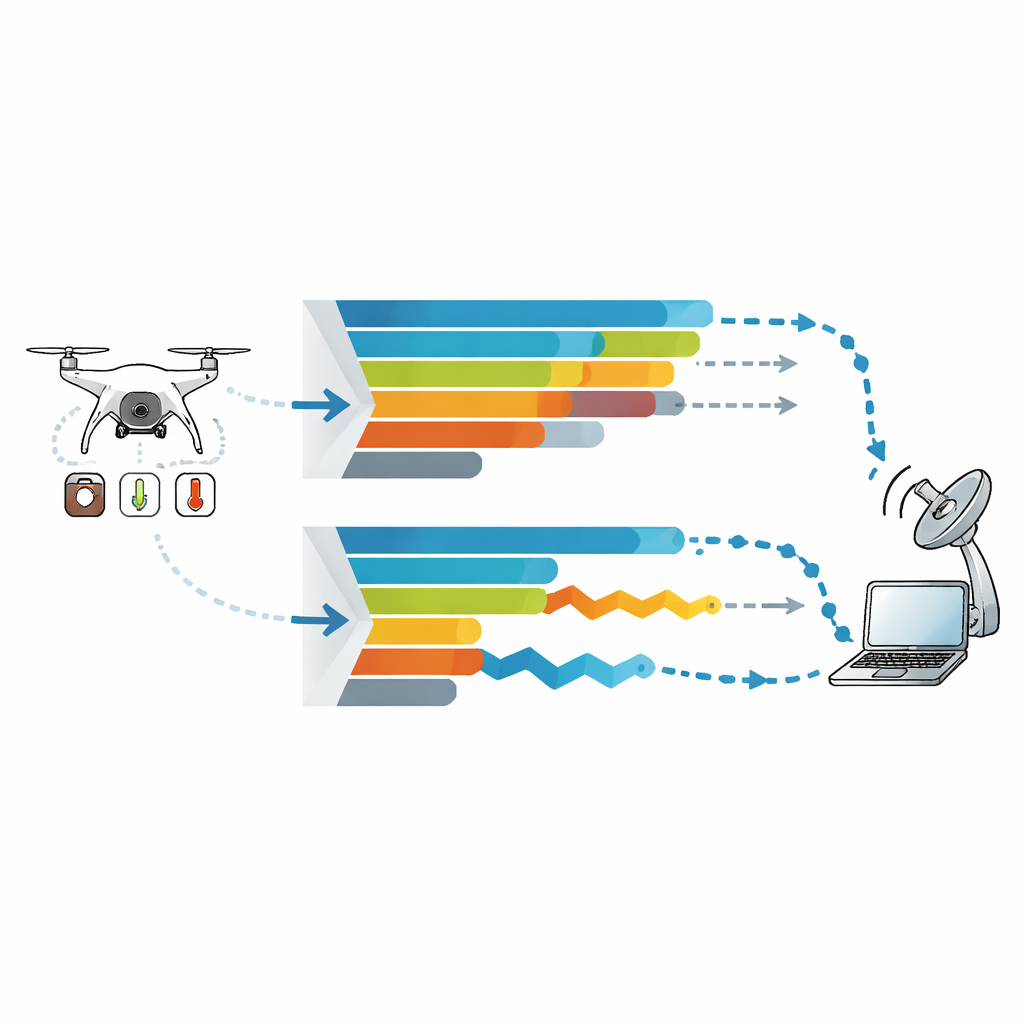
Rather than designing a completely new communication system, the researchers build on Web Real-Time Communications (WebRTC), the same family of technologies that powers many video calls in a web browser. In their setup, a small computer mounted on the drone collects readings from several environmental sensors and its positioning module, wraps them into lightweight MQTT messages and sends them through WebRTC’s “Data Channel” down to a ground station. This air–ground link uses Wi‑Fi 5, a common wireless standard that can support low delays when carefully configured. For comparison, they also create a reference system that swaps the WebRTC Data Channel for a more traditional web connection called WebSocket, which relies on the familiar TCP transport protocol.
Real flights in a real campus
To test how steady the timing really is, the team conducts multiple drone flights over a university parking lot surrounded by buildings, under varying weather and network load conditions. The area is covered by several Wi‑Fi access points, so as the drone flies a survey pattern at about 15 meters altitude, its radio link hops between access points and between purely wireless and mixed wired–wireless paths. Every half second, the drone sends a burst of nine sensor readings plus metadata; for each data item, the researchers precisely timestamp when it enters the sending side and when it emerges on the receiving side. From series of 40,000 such measurements per flight, they compute standard statistics such as range, variance and standard deviation to quantify how much the end-to-end delay fluctuates.
How steady is “steady enough”?
When the underlying Wi‑Fi link is error-free, the WebRTC-based system shows remarkably tight timing: the spread in delays is measured in tens of microseconds (millionths of a second), effectively corresponding to jitter that is practically zero on the millisecond scale engineers usually care about. This holds both at the transport layer, where packets first arrive, and at the logical channel level inside WebRTC. Even when a single packet is lost and retransmitted, temporarily stretching one delay by several milliseconds, the overall timing pattern remains very stable once that rare outlier is discounted. By contrast, the WebSocket-based reference system exhibits much larger spreads—often orders of magnitude higher—meaning that packet arrival times wander over many milliseconds even when there are no transmission errors.
Inside the timing behavior
The paper also probes where the remaining fluctuations come from. WebRTC’s Data Channel uses a transport protocol that normally does not reshuffle packets that arrive slightly out of order; instead, it passes them upward quickly. Any reordering needed to preserve the original sequence is performed in a buffer at a higher level. In error-free runs, this buffer adds only a fixed, tiny extra processing delay, so all statistical measures of jitter look essentially the same whether measured at the transport level or higher up. When a rare retransmission occurs, however, packets that arrived early can be held in the buffer while the late packet catches up, inflating some jitter measures at the logical channel level. The authors therefore caution against enabling strict in-order delivery in WebRTC unless it is absolutely required by the application.
What this means for future smart cities
For lay readers, the bottom line is that the researchers show a practical way to turn everyday web technologies into an ultra-steady data link for flying sensors over a city. Their field experiments indicate that a UAV using WebRTC’s Data Channel over a carefully managed Wi‑Fi 5 network can deliver sensor readings with almost no timing wobble, even as it moves through a complex urban radio landscape. Compared with a more traditional web approach, the WebRTC setup keeps delays not only short but consistently short, which is crucial for tasks like precise navigation, real-time monitoring and control. This suggests that future smart city services can lean on widely deployed web standards, rather than entirely new protocols, to meet some of the toughest demands for reliable, low-jitter communication from the sky.
Citation: Chodorek, A., Chodorek, R.R. & Sitek, P. Fluctuations of end-to-end delays in low-latency WebRTC-based UAV-borne internet of things operating in an urban environment. Sci Rep 16, 11165 (2026). https://doi.org/10.1038/s41598-026-41558-4
Keywords: smart cities, unmanned aerial vehicles, low-latency communication, WebRTC data channel, internet of things