Clear Sky Science · ru
Интегрированный фотонный 3D-движок обработки тензоров
Почему важны более быстрые «мыслящие» машины
От автономных автомобилей до медицинских томографов и виртуальной реальности — наш мир всё больше зависит от компьютеров, способных в реальном времени понимать сложные трёхмерные данные. Современные системы искусственного интеллекта мощны, но электронные чипы, на которых они работают, уже испытывают нагрузку из‑за требования к всё более крупным и быстрым нейронным сетям. В этой статье предложен новый способ обработки таких 3D‑данных с использованием света вместо электричества, что обещает более быстрые и энергоэффективные «мыслительные» машины, способные сделать автомобили безопаснее, диагностику — быстрее, а онлайн‑опыт — более погружающим.
От плоских изображений к трёхмерным мирам
Многие знакомые системы ИИ работают с плоскими изображениями — двумерными сетками пикселей — используя так называемые сверточные нейронные сети. Но современные датчики, такие как медицинские сканеры и лазерный LiDAR в автономных машинах, захватывают полные трёхмерные сцены во времени. Такие более богатые наборы данных естественно описываются как «тензоры», или многомерные массивы. Их обработка 3D‑нейросетями очень мощна, но и крайне требовательна: объёмы вычислений и памяти быстро растут с добавлением каждой размерности. Традиционные электронные ускорители, такие как GPU и TPU, в основном оптимизированы для плоских двумерных матричных операций, поэтому им приходится постоянно перегруппировывать и перемещать 3D‑данные, тратя время, энергию и память.

Пусть свет выполняет тяжёлую работу
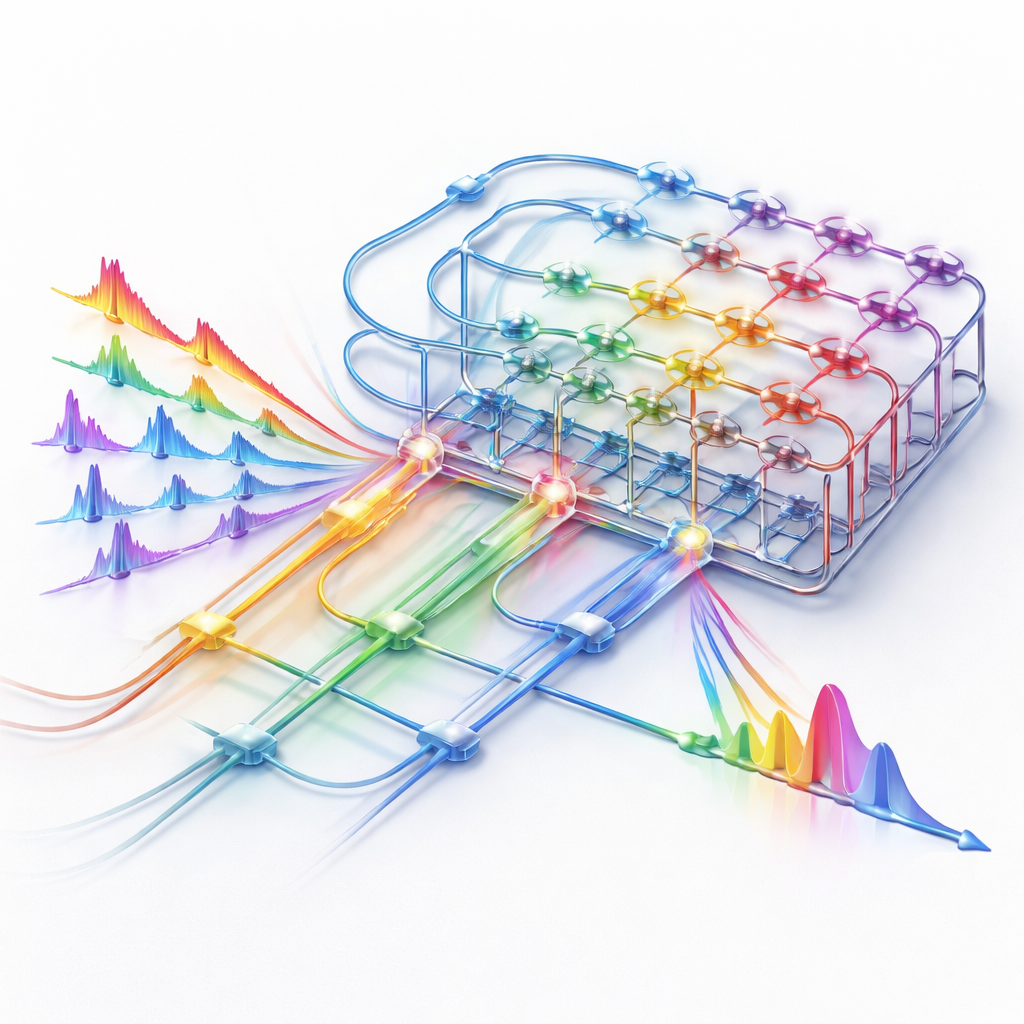
Исследователи предлагают интегрированный фотонный 3D‑движок обработки тензоров, который выполняет ключевой этап 3D‑нейросетей прямо с помощью света. Вместо многократной передачи данных между памятью и электронными процессорами их система посылает информацию в виде оптических сигналов, которые проходят по крошечным волноводам и резонаторам на чипе. Для кодирования и обработки данных одновременно используются три разные «оси»: цвет (длина волны) света, момент времени, в который проходят импульсы, и физические дорожки, по которым они идут по чипу. Переплетая эти три измерения, система может выполнять полные 3D‑свертки без разбиения задач на множество мелких операций и без громоздкой электронной управляющей аппаратуры.
Встроенная оптическая память и синхронизация
Одна из ключевых проблем高速 вычислений — точная временная синхронизация множества каналов данных. Традиционные системы используют сложные электронные тактовые схемы и большие буферы памяти для этой цели. В предложенном решении проблему полностью устраняют в оптической области. Они добавляют два оптических блока памяти в виде настраиваемых линий задержки до и после основного вычислительного блока. Эти линии задержки действуют как регулируемые «приёмные комнаты» для световых импульсов, позволяя системе кэшировать данные и синхронизировать каналы простым изменением времени прохождения каждого импульса по чипу. Задержки можно точно настраивать с пикосекундной (триллионной доли секунды) точностью и обеспечивать эффективные тактовые частоты до примерно 200 миллиардов операций в секунду, и всё это без дополнительной электронной синхронизации.
Умные оптические схемы для тяжёлой математики
В основе вычислительного блока лежит решётка из крошечных кольцевых оптических резонаторов, которые управляют вкладом каждого светового канала в итоговый результат — аналогично настраиваемым весам в нейронной сети. Авторы используют специальную конструкцию с двойными кольцами на многослойной фотонной платформе, что делает эти элементы менее чувствительными к температурным изменениям и технологическим дефектам, при этом обеспечивая широкую, ровную оптическую характеристику. Это позволяет кольцам обрабатывать высокоскоростные сигналы с меньшими искажениями и поддерживать точную настройку весов — эквивалент более чем 7 бит эффективной точности — с помощью простой калибровки. В экспериментах чип успешно выполнял умножение матриц с четырьмя каналами на скоростях символов до 30 гигабауд, демонстрируя и скорость, и точность.
Полевое испытание с 3D‑лазерным сканированием
Чтобы показать практическую пользу движка вне лабораторных бенчмарков, команда применила его к реальной задаче 3D‑распознавания: различению пешеходов и транспортных средств в облаках точек LiDAR. Они использовали компактную 3D‑нейросеть, похожую на известные модели реального времени, обучили её параметры в цифровом виде, а затем перенесли ключевой этап 3D‑свертки в фотонный движок. При работе на скорости 20 гигабауд оптическая система сформировала карты признаков, очень близкие к цифровым вычислениям, и достигла точности классификации около 97% — по сути того же уровня, что и традиционный компьютер, но с проведением тяжёлой 3D‑математики с помощью света.
Что это значит для повседневных технологий
Проще говоря, эта работа демонстрирует возможность построить компактный оптический «математический движок», который напрямую решает самую сложную часть 3D‑нагрузок ИИ, одновременно требуя меньше памяти, меньшего числа электронных компонентов и потенциально значительно меньше энергии, чем существующие решения. Сохраняя кэширование данных, выравнивание по времени и вычисления в оптической области, подход снижает сложность и открывает путь к более высоким скоростям и большей параллельности. По мере совершенствования фотонной интеграции и развития на‑чиповых источников света и усилителей такие 3D‑тензорные движки могут стать ключевыми строительными блоками в будущих устройствах для автономного вождения, медицинской визуализации, видеоаналитики и иммерсивных виртуальных сред — тихо используя пучки света, чтобы помочь машинам видеть и понимать наш трёхмерный мир в реальном времени.
Цитирование: Wu, Y., Ni, Z., Li, X. et al. Integrated photonic 3D tensor processing engine. Light Sci Appl 15, 154 (2026). https://doi.org/10.1038/s41377-026-02183-y
Ключевые слова: фотонные вычисления, 3D нейронные сети, оптические ускорители, распознавание LiDAR, обработка тензоров