Clear Sky Science · pt
Medição de formas precisa e rápida baseada em eventos para cenas de refletância mista
Vendo Mundos Brilhantes e Foscos Juntos
De desbloqueio facial em celulares a robôs de fábrica, muitos dispositivos hoje dependem de câmeras que detectam profundidade, não apenas cor. Ainda assim, esses sistemas frequentemente tropeçam no mundo real, onde paredes opacas, plásticos brilhantes e metais quase espelhados aparecem lado a lado. Esta pesquisa apresenta uma nova forma de capturar a geometria 3D de tais cenas mistas rapidamente e com alta precisão, usando uma câmera especial “baseada em eventos” e um laser de varredura, de modo que até objetos brilhantes e em movimento possam ser medidos em detalhe.
Por Que Coisas Brilhantes São Tão Difíceis de Medir
A maioria das câmeras 3D é projetada para um tipo de superfície de cada vez. Técnicas que projetam padrões e observam como eles se deformam funcionam bem em objetos foscos, porque a luz se espalha em muitas direções e é fácil de ser vista pela câmera. Mas essas técnicas falham em espelhos e metais polidos, onde a luz reflete em uma única direção, como uma bola de bilhar numa mesa. Por outro lado, métodos que se destacam em espelhos, como a defletometria usando uma grande tela como fonte de luz conhecida, têm dificuldade com objetos parcialmente brilhantes e exigem montagens volumosas e cuidadosamente calibradas. Cenas reais, como interiores de carros ou salas de estar, misturam todos esses tipos de superfície, o que torna os sistemas atuais lentos, frágeis ou incompletos.
Câmeras de Eventos e Feixes de Varredura
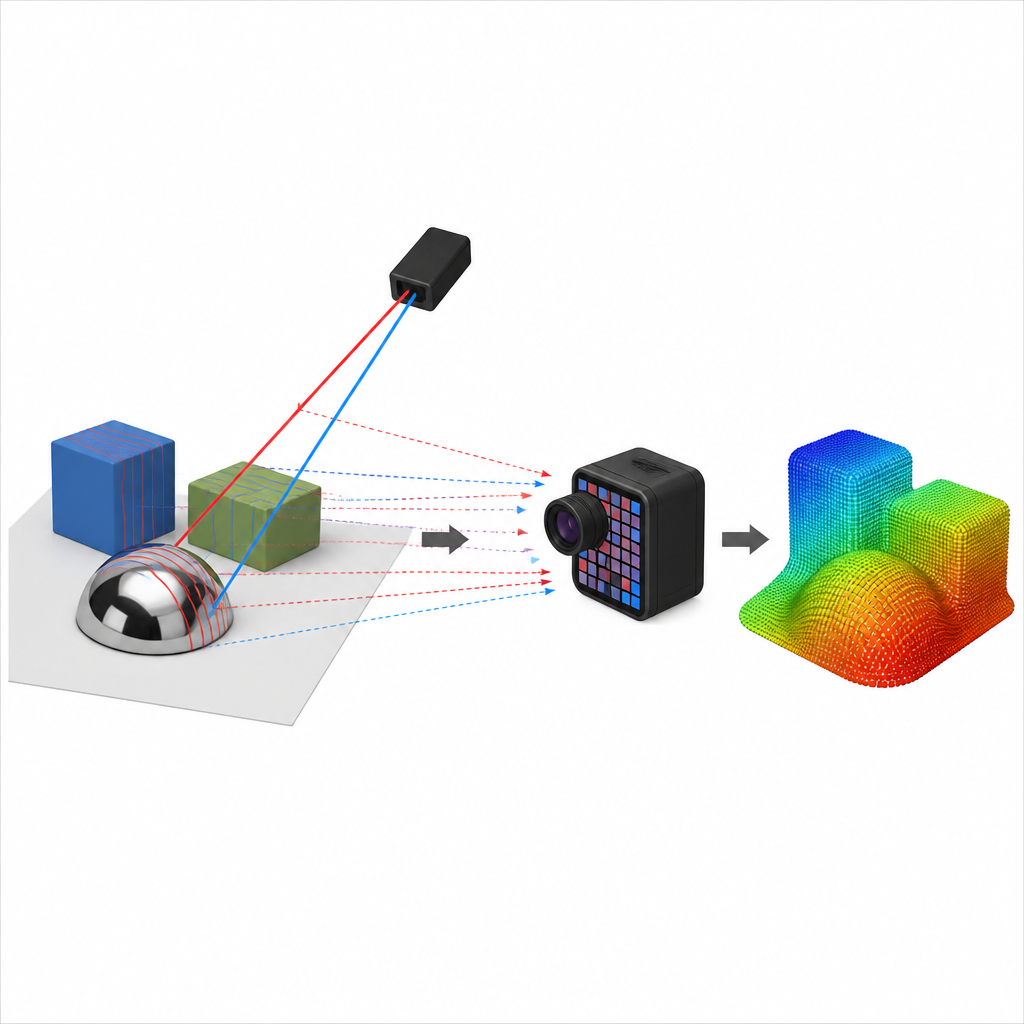
Os autores constroem um sistema compacto com apenas duas partes: uma câmera baseada em eventos e um laser que varre linhas finas pela cena. Ao contrário de uma câmera normal, que captura imagens completas em tempos fixos, uma câmera de eventos reporta apenas os pixels onde o brilho muda, e faz isso com temporização em microssegundos. À medida que linhas a laser horizontais e verticais varrem a cena, a câmera registra um fluxo preciso de “eventos” marcando onde e quando a luz se moveu. Ao combinar essas varreduras, o sistema pode inferir profundidade em áreas foscas por triangulação, semelhante em espírito a scanners de luz estruturada, porém com maior velocidade e melhor tolerância a reflexos e a mudanças na iluminação ambiente.
Transformando Toda Parede em uma Tela Virtual
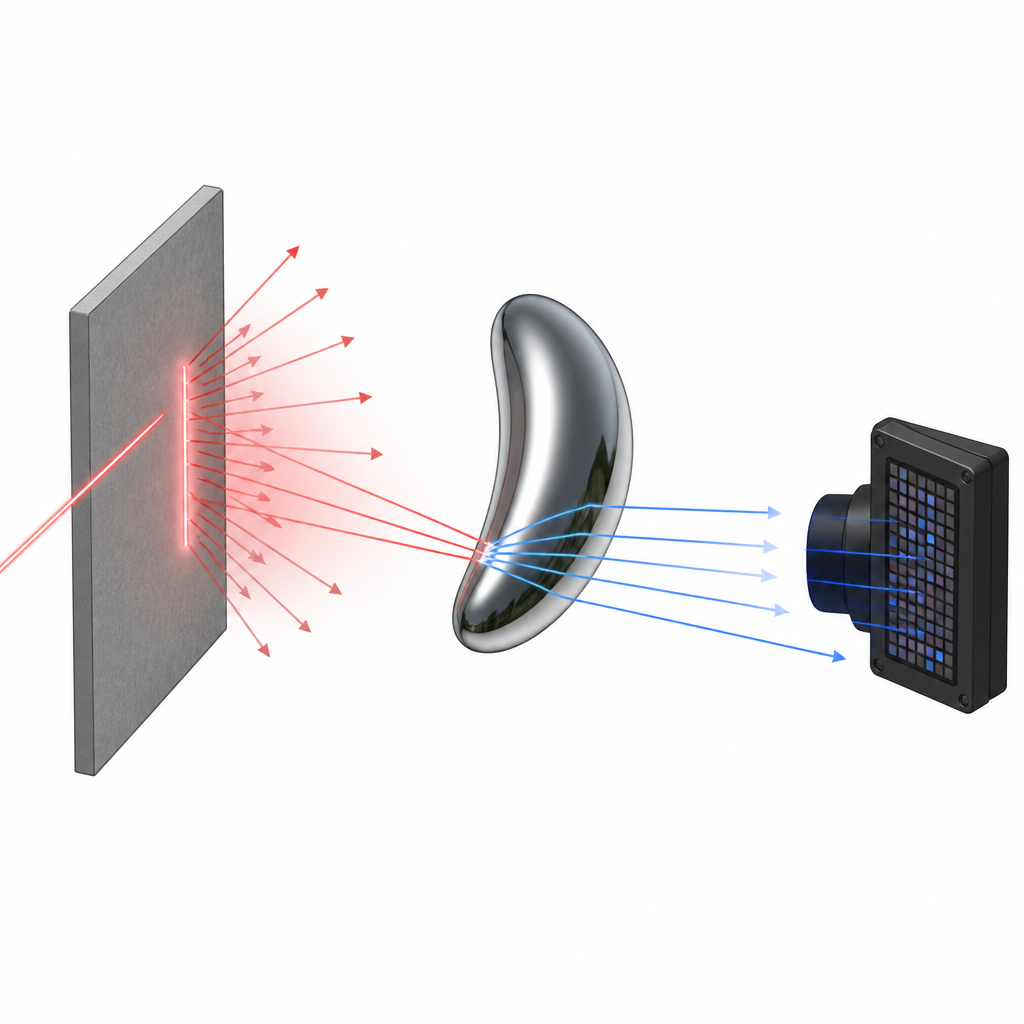
A ideia chave do trabalho é reutilizar as partes foscas medidas da cena como uma espécie de display virtual para analisar objetos brilhantes. Primeiro, o sistema reconstrói a geometria de todas as superfícies difusas usando as reflexões diretas do laser. Essas superfícies então atuam como fontes de luz: quando o laser as atinge, elas espalham luz em direção a espelhos e itens brilhantes próximos, que por sua vez refletem a luz para a câmera de eventos. Ao comparar o tempo e a geometria desses trajetos de duas voltas com o que já foi aprendido a partir das superfícies foscas, o método consegue estimar as inclinações e formas de objetos especulares sem precisar de nenhuma tela física. Em efeito, “tudo ao redor se torna uma tela”, e a cobertura das superfícies brilhantes pode ser aumentada simplesmente adicionando ou movendo objetos difusos do dia a dia.
Separando as Muitas Formas como a Luz Pode Viajar
Para que isso funcione, o sistema precisa separar diferentes caminhos de luz que se misturam no fluxo de eventos. Os autores usam regras geométricas, conhecidas como restrições epipolares, para decidir se um evento detectado provavelmente vem de uma reflexão de um único salto adequada para triangulação, de um caminho de duas voltas útil para recuperar forma especular, ou de um caminho multicaminho mais complexo ou subsuperficial que deve ser descartado. Eles também projetam um procedimento de otimização que refina a forma de objetos brilhantes para que as normais de superfície inferidas concordem com as direções de luz observadas. Testes com esferas, espelhos, balões e brinquedos brilhantes mostram que os erros de profundidade ficam abaixo de 0,6 milímetro tanto em superfícies foscas quanto especulares, e que o sistema pode operar a cerca de 14 quadros 3D por segundo para cenas mistas e até 250 quadros por segundo para cenas puramente difusas.
O Que Isso Significa para Futuras Câmeras 3D
Essa abordagem aponta para uma nova classe de sensores de profundidade capazes de lidar com ambientes desordenados, reflexivos e até em movimento com um único dispositivo compacto. Ao combinar sensoriamento baseado em eventos com varredura a laser inteligente e ao tratar paredes e objetos ao redor como telas virtuais, o método preenche uma lacuna de longa data entre tecnologias ajustadas para superfícies foscas ou espelhadas. Embora ainda existam limites, como a dependência de algum material difuso na cena e o tratamento de reflexos complexos raros, os resultados sugerem caminhos práticos para uma visão 3D mais confiável em aplicações que vão de headsets de RA e RV à inspeção robótica de peças industriais brilhantes.
Citação: Dashpute, A., Wang, J., Taylor, J. et al. Accurate and fast event-based shape measurement of mixed reflectance scenes. Nat Commun 17, 4407 (2026). https://doi.org/10.1038/s41467-026-72254-6
Palavras-chave: imagens 3D, câmera de eventos, refletância mista, superfícies especulares, luz estruturada