Clear Sky Science · pl
Wspólna selekcja cech oparta na MVMD i optymalny FW-LS-TWSVM dla rozpoznawania wyobrażonego ruchu
Nauczanie komputerów odczytywania wyobrażonego ruchu
Wyobraź sobie sterowanie wózkiem inwalidzkim lub ramieniem robota tylko przez myślenie o poruszeniu ręką. To badanie analizuje, jak uczynić tego typu technologię sterowaną mózgiem bardziej dokładną i szybką, aby lepiej pomagała osobom z problemami ruchowymi oraz wspierała płynną współpracę człowiek–maszyna.

Dlaczego sterowanie sygnałem mózgowym jest trudne
Interfejsy mózg–komputer przekształcają drobne sygnały elektryczne z powierzchni czaszki w polecenia dla urządzeń zewnętrznych. W systemach opartych na wyobrażonym ruchu ludzie jedynie wyobrażają sobie ruch ręki lub stopy, a czujniki rejestrują związaną z tym aktywność mózgu. Te sygnały są bardzo słabe i łatwo ulegają zakłóceniom wynikającym z różnic międzyosobniczych, zmian nastroju czy zmęczenia oraz szumu tła. W efekcie wiele istniejących systemów nie jest wystarczająco dokładnych lub niezawodnych do codziennego użytku, szczególnie gdy dostępnych jest tylko ograniczone dane treningowe.
Znajdowanie odpowiednich fragmentów sygnału mózgowego
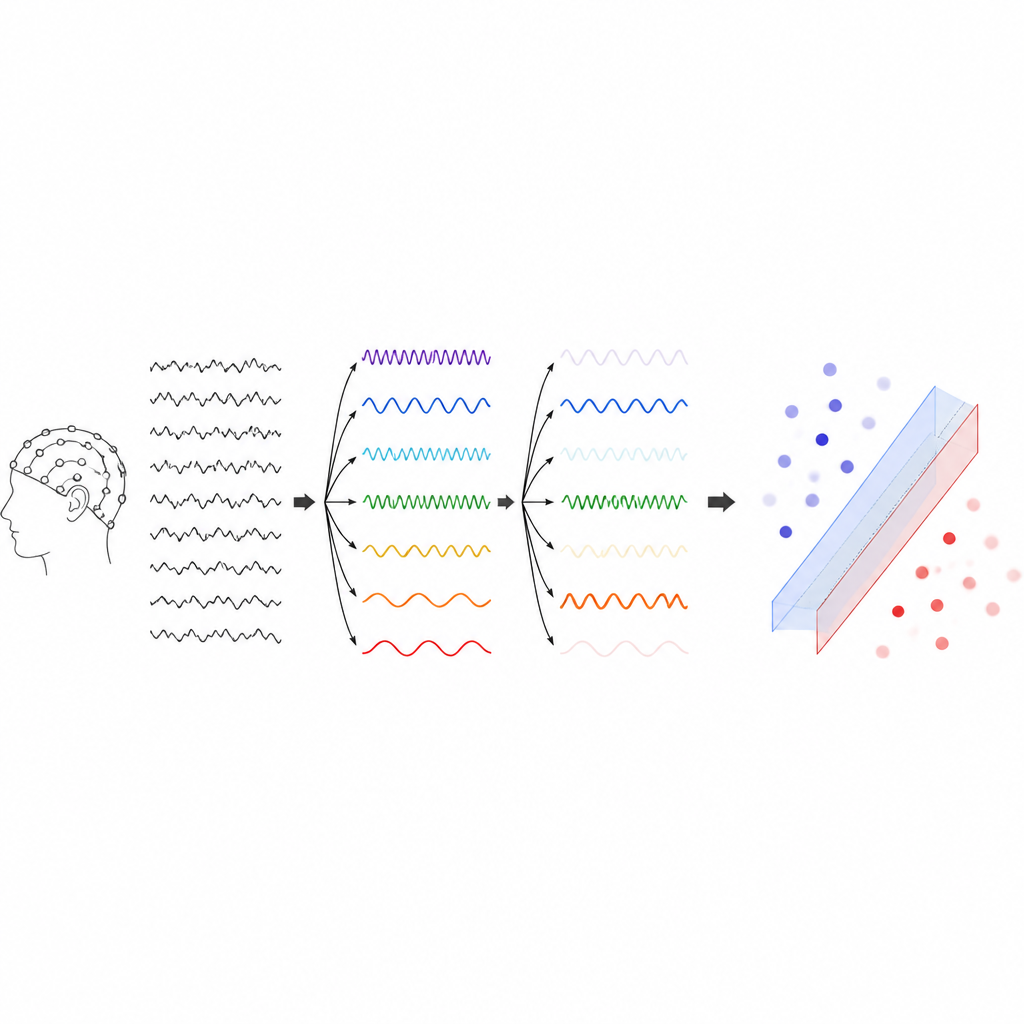
Autorzy skupiają się na starannym przygotowaniu i selekcji cech sygnału mózgowego, zamiast polegać wyłącznie na głębokim uczeniu. Najpierw oczyszczają sygnały i dzielą je na krótkie okna czasowe, by znaleźć okres najlepiej odzwierciedlający wyobrażony ruch. Następnie rozkładają każdy sygnał na kilka składowych odpowiadających różnym zakresom częstotliwości, stosując metodę analizującą wszystkie kanały razem. Ten krok pomaga oddzielić istotne wzorce związane z ruchem od innej aktywności i szumu. Z każdej składowej wyodrębniają wzorce przestrzenne podkreślające, jak grupy elektrod zmieniają się wspólnie podczas różnych wyobrażonych ruchów.
Wybieranie tylko tego, co naprawdę pomaga
Nie każde pasmo częstotliwości czy wzorzec przestrzenny jest przydatny. Metoda testuje statystycznie, jak bardzo każda cecha poprawia zdolność rozróżnienia wyobrażonej lewej i prawej ręki. Cechy, które niewiele wnoszą, są usuwane, pozostawiając zwarty zestaw najbardziej informacyjnych fragmentów sygnału. Ta adaptacyjna selekcja może się różnić w zależności od osoby, a nawet od sesji nagraniowej, odzwierciedlając fakt, że każdy mózg i każdy dzień rejestracji mają swoje specyficzne cechy. Odrzucając nadmiarowe i niestabilne cechy, system staje się zarówno dokładniejszy, jak i bardziej wydajny.
Mądrzejszy sposób wyznaczania granicy decyzyjnej
Gdy najlepsze cechy zostaną wybrane, system nadal potrzebuje klasyfikatora radzącego sobie z wartościami odstającymi, takimi jak zaszumione lub nietypowe próby. W pracy wprowadzono rozmytą, ważoną wersję szybkiej maszyny wektorów nośnych, która uczy dwie płaszczyzny decyzyjne zamiast jednej. Każdemu przykładowi treningowemu przypisywana jest waga na podstawie tego, jak typowy jest dla swojej klasy, więc podejrzane lub zaszumione próbki mają mniejszy wpływ. Takie rozwiązanie zmniejsza wpływ złych danych, jednocześnie utrzymując szybkość treningu wystarczającą do zastosowań niemal w czasie rzeczywistym.
Jak dobrze działa metoda
Naukowcy przetestowali cały swój proces na dwóch dużych publicznych zestawach danych wyobrażonych ruchów rąk, nagrywanych z dziesiątkami elektrod na skórze głowy. Ich podejście osiągnęło średnio około 87–88 procent trafności, wyraźnie lepiej niż kilka niedawnych systemów opartych na głębokim uczeniu i innych zaawansowanych klasyfikatorów korzystających z tych samych danych. Pokazali również, że użycie adaptacyjnego rozkładu częstotliwości i selekcji cech razem dało zauważalny wzrost w porównaniu z prostszymi filtrami o stałych pasmach lub starszymi metodami dekompozycji.
Co to oznacza dla przyszłego sterowania mózgiem
Dla czytelnika niespecjalisty wniosek jest taki, że badanie pokazuje, jak staranna selekcja części sygnału mózgowego, którym warto ufać, oraz ograniczanie wpływu zaszumionych przykładów mogą uczynić urządzenia sterowane myślami bardziej niezawodnymi i responsywnymi. Chociaż potrzeba jeszcze pracy, zanim takie systemy staną się powszechne w codziennym życiu, to podejście przybliża nas do praktycznych narzędzi wspomagających rehabilitację, przywracających utracony ruch i rozszerzających sposoby interakcji ludzi z maszynami wyłącznie za pomocą myśli.
Cytowanie: Zhi, J., Zhang, Q., Li, Y. et al. Joint MVMD-based optimal feature selection and FW-LS-TWSVM for motor imagery recognition. Sci Rep 16, 15648 (2026). https://doi.org/10.1038/s41598-026-46642-3
Słowa kluczowe: wyobrażony ruch, interfejs mózg-komputer, dekodowanie EEG, selekcja cech, maszyna wektorów nośnych