Clear Sky Science · pl
Algorytm semantycznej segmentacji obiektów w tle o ruchu dynamicznym oparty na współpracy sieci generatywnej przeciwstawnej i transformera
Wyraźne widzenie w ruchomym świecie
Od samochodów autonomicznych po inteligentne kamery bezpieczeństwa — maszyny coraz częściej muszą rozumieć, co dzieje się w zatłoczonych, szybko zmieniających się scenach. Dla komputera rozróżnienie poruszającej się osoby od migających świateł reflektorów, kołyszących się drzew czy rozmycia ruchu bywa jednak bardzo trudne. W tym badaniu przedstawiono nowy sposób, w jaki sztuczna inteligencja może wyodrębniać poruszające się obiekty w złożonym wideo, nawet gdy samemu tłu towarzyszy ruch, gdy warunki oświetleniowe są słabe lub gdy obraz jest nieostry.
Dlaczego zatłoczone sceny wprowadzają maszyny w błąd
Nasz świat rzadko pozostaje nieruchomy. Samochody przejeżdżają pod migającymi latarniami, tłumy przenikają się nawzajem, a deszcz czy cienie nieustannie przekształcają to, co widzi kamera. Tradycyjne systemy widzenia komputerowego były projektowane z myślą o spokojniejszych ujęciach, gdzie tło niewiele się zmienia. W chaotycznych scenach często mylą poruszające się obiekty z ruchomymi wzorcami tła albo tracą śledzenie osób i pojazdów przy nagłych zmianach oświetlenia czy gdy sama kamera się porusza. Te słabości ograniczają bezpieczeństwo autonomicznej jazdy i niezawodność inteligentnego nadzoru właśnie tam, gdzie dokładność ma największe znaczenie.
Dwie silne idee współpracujące ze sobą
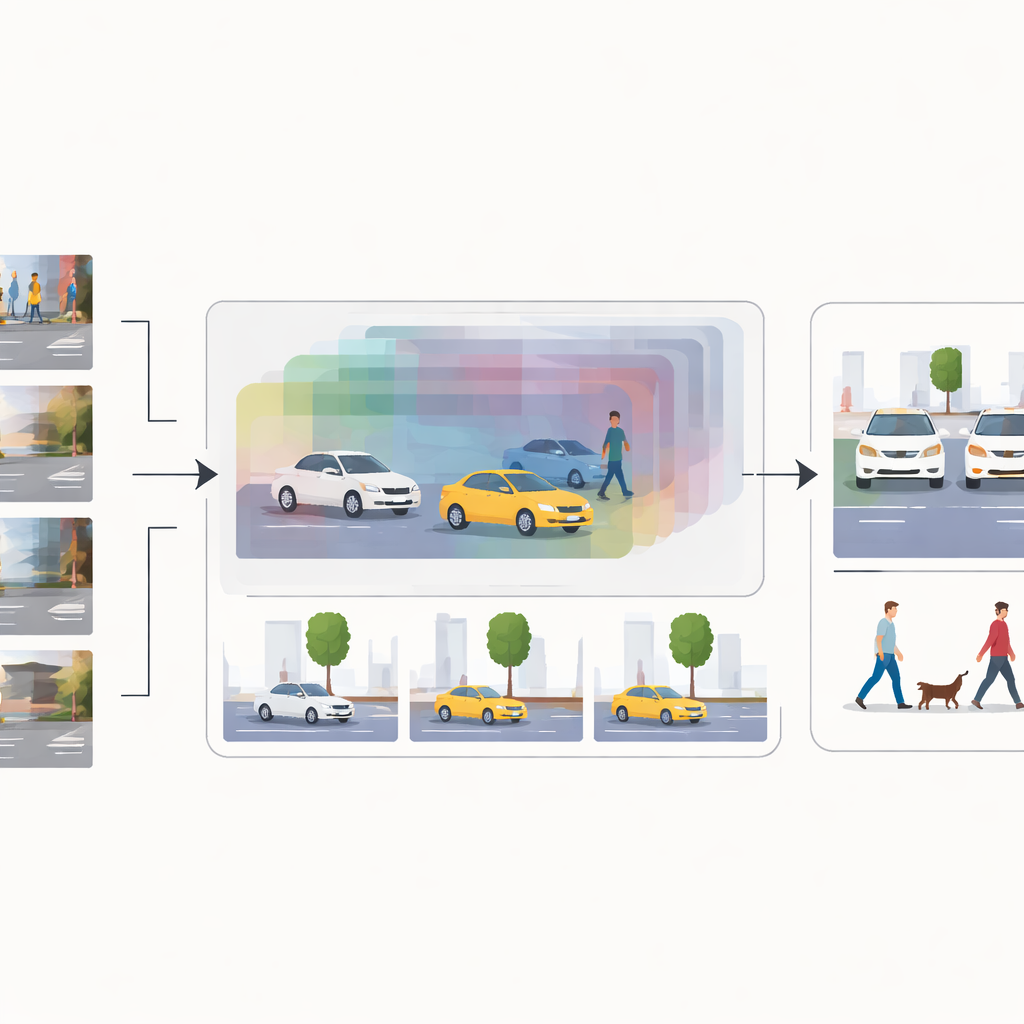
Aby przezwyciężyć te problemy, autorzy łączą dwie wpływowe koncepcje AI w jeden, ściśle powiązany system: jedną specjalizującą się w tworzeniu realistycznych obrazów i drugą, która świetnie radzi sobie ze zrozumieniem dalekosiężnych zależności w danych. Pierwsza, para generator–dyskryminator, uczy się syntezować wiele wersji tej samej sceny przy różnych warunkach oświetlenia, rozmyciu ruchu i ruchu tła. To skutecznie buduje bogate pole treningowe, gdzie model wielokrotnie ćwiczy radzenie sobie z trudnymi warunkami wizualnymi. Druga, moduł oparty na transformerze, ogląda cały obraz naraz i korzysta z mechanizmu uwagi, by zdecydować, które regiony są najważniejsze, co pozwala mu łączyć odległe części sceny i lepiej rozróżniać obiekty pierwszego planu od niespokojnego tła.

Balansowanie szumu tła i detalu obiektów
Kluczową innowacją jest sposób, w jaki system decyduje, dla każdego regionu obrazu, na ile ufać modelowaniu tła wobec rozumienia skupionego na obiektach. Zamiast po prostu nakładać jeden moduł na drugi, autorzy zaprojektowali krok fuzji z „bramką”, który miesza trzy źródła informacji: symulowane dynamiczne tło, podstawowe wskazówki wizualne z tradycyjnych filtrów obrazowych oraz mapę semantyczną wysokiego poziomu wygenerowaną przez transformera. Wyuczona bramka płynnie przesuwa nacisk w stronę modelu tła tam, gdzie rozproszenia są najsilniejsze, i w stronę cech skupionych na obiektach w pobliżu krawędzi samochodów, ludzi czy innych celów. Dodatkowe reguły zachęcają generowane tła do pozostawania semantycznie spójnymi z rzeczywistymi, dzięki czemu dane treningowe są nie tylko wizualnie przekonujące, ale też znaczące dla zadania.
Śledzenie ruchu w czasie
Prawdziwe wideo to nie tylko zbiór oddzielnych klatek; ruch niesie kluczowe wskazówki. Aby to uchwycić, system zawiera moduł uwagi temporalnej, który wprowadza informacje o ruchu uzyskane z przepływu optycznego — metody szacowania, jak piksele przesuwają się między kolejnymi klatkami. Moduł ten pomaga modelowi śledzić obiekty, gdy się poruszają, częściowo zasłaniają lub ponownie pojawiają, utrzymując stabilne kontury na przestrzeni wielu klatek. Autorzy testują swoje podejście zarówno na starannie kontrolowanych scenach wirtualnych — gdzie można regulować oświetlenie, prędkość ruchu i zagracenie tła — jak i na znanym zbiorze danych KITTI, który zawiera wymagające nagrania uliczne z rzeczywistego świata.
Co znaczą wyniki w praktyce
Połączony system zapewnia ostrzejsze i bardziej niezawodne oddzielenie poruszających się obiektów od ich otoczenia niż kilka powszechnie stosowanych metod. Osiąga większe średnie pokrycie między przewidywanymi regionami obiektów a ich rzeczywistymi obszarami, jest bardziej stabilny w różnych warunkach oświetlenia i ruchu oraz mniej się waha w czasie. Usunięcie któregokolwiek z głównych składników — generatora obrazów, transformera czy modułów fuzji i temporalnych — zauważalnie osłabia wydajność, co podkreśla, że zyski wynikają ze współpracy tych elementów, a nie z pojedynczego triku. Chociaż ta bogatsza architektura wymaga więcej obliczeń, już dziś działa wystarczająco szybko dla wielu zastosowań w czasie rzeczywistym na nowoczesnym sprzęcie graficznym. W praktyce praca pokazuje, że uczenie maszyn wyobrażania sobie trudnych scen i stosowania selektywnej, świadomej czasu uwagi pozwala im „widzieć” bardziej podobnie do nas, poprawiając bezpieczeństwo i niezawodność systemów, które muszą interpretować nieustannie poruszający się świat.
Cytowanie: Li, Y., Luo, Z., Chen, T. et al. Dynamic background motion object semantic segmentation algorithm based on generative adversarial network and transformer collaboration. Sci Rep 16, 12626 (2026). https://doi.org/10.1038/s41598-026-39249-1
Słowa kluczowe: rozumienie scen dynamicznych, wykrywanie poruszających się obiektów, widzenie w autonomicznej jeździe, semantyczna segmentacja wideo, odporność w widzeniu komputerowym