Clear Sky Science · nl
Vergelijkende evaluatie van YOLO- en RT-DETR-modellen voor realtime detectie van defecten bij houtgebaseerd 3D-printen
Waarom het belangrijk is dat 3D-geprinte houten onderdelen vlekkeloos zijn
Naarmate 3D-printen zich ontwikkelt van plastic speelgoed naar echte producten, valt houtgebaseerd printen op door zijn warme uitstraling en klimaatvriendelijke eigenschappen. Maar kleine onregelmatigheden in het losse houtpoeder dat elke laag vormt kunnen onderdelen verzwakken, oppervlakken bederven en materiaal verspillen. Deze studie stelt een praktische vraag: welke moderne AI-tools zijn het best in staat deze defecten snel genoeg te detecteren om problemen te verhelpen terwijl de printer nog draait?
Houtpoeder, camera's en verborgen defecten
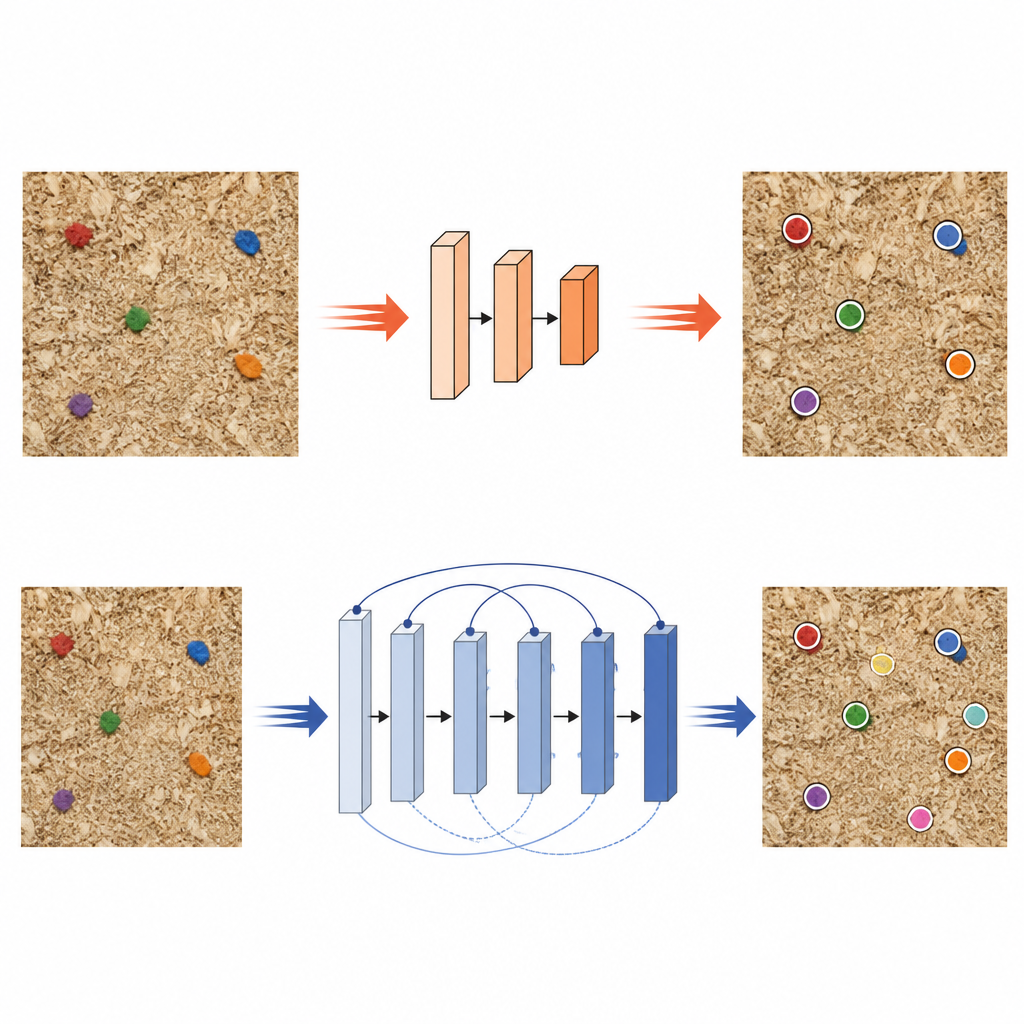
De onderzoekers werkten met een aangepaste 3D-printer die houten objecten bouwt door dunne lagen houtpoeder te verspreiden en deze met een vloeibare lijm samen te voegen. Na iedere verspreide laag fotografeert een hoge-resolutiecamera het poederbed. Deze beelden leggen subtiele problemen vast in het poeder, zoals losliggend vuil, strepen veroorzaakt door de roller of plekken waar het poeder niet gelijkmatig is verdeeld. Uit honderden van dergelijke beelden bouwde het team een dataset van 599 voorbeelden en labelde zes hoofdtypen defecten, waaronder vervuiling, weggetrokken poeder, onvoldoende verspreiding en onregelmatige bewegingen van de roller. Deze gelabelde verzameling vormde de basis voor het trainen en testen van verschillende concurrerende AI-modellen.

Machines leren problemen in het poeder te zien
Om beelden om te zetten in snelle kwaliteitscontroles gebruikte het team objectdetectienetwerken, een vorm van deep learning die rechthoeken om relevante onderdelen in een afbeelding tekent. Ze vergeleken vier versies van een populaire familie genaamd YOLO, bekend om zijn snelheid, met een nieuwer Transformer-gebaseerd model genaamd RT-DETR dat zich richt op nauwkeurigheid. Alle modellen werden onder gelijke voorwaarden getraind, met dezelfde afbeeldingsgrootte, aantal trainingsronden en basisinstellingen. Het doel was te meten hoe goed elk model poederbeddefecten kon vinden en classificeren en hoe lang het duurde om elke afbeelding te verwerken.
Snelheid versus nauwkeurigheid op echte printdata
In het algemeen presteerden de modellen uitstekend bij het detecteren van sommige defecten, terwijl ze moeite hadden met andere. Problemen zoals plekken met ontbrekend poeder en het overslaan van de roller werden zeer betrouwbaar herkend, terwijl kleine verontreinigingen en subtiele strepen in de poedertextuur veel moeilijker van de achtergrond te onderscheiden waren. Onder de YOLO-modellen leverde YOLOv11 de meest zuivere voorspellingen, met het hoogste aandeel correcte detecties en minder valse alarmen, maar het draaide langzamer dan eerdere versies. YOLOv5 en YOLOv8 boden een meer gebalanceerd profiel: ze waren snel genoeg voor strakke realtime-eisen en leverden toch degelijke nauwkeurigheid, waardoor ze aantrekkelijk zijn voor praktische monitoringsystemen die gelijke tred moeten houden met de printer.
Een nadere blik op het meest nauwkeurige model
Het RT-DETR-model, dat steunt op een Transformer-ontwerp vergelijkbaar met die in moderne taalmodellen, kwam als beste uit de bus wat betreft algehele detectienauwkeurigheid. Het behaalde de hoogste score voor het correct vinden van defecten over alle categorieën en was bijzonder sterk in het vastleggen van het veelvoorkomende maar kritieke probleem van onvoldoende poederverdeling. Deze extra grondigheid ging echter ten koste van de snelheid: het kostte meerdere malen meer tijd om elke afbeelding te analyseren dan de snelste YOLO-versies. Voor fabrieken die direct laag na laag moeten reageren, kunnen dergelijke vertragingen het gebruik beperken tenzij er meer rekenkracht wordt toegevoegd.
Wat dit betekent voor slimmer 3D-printen
Voor iemand die een houtgebaseerde 3D-printer bedient, bieden deze bevindingen een keuzemenu. Als het detecteren van zo veel mogelijk defecten de hoogste prioriteit heeft en een kleine vertraging acceptabel is, is RT-DETR de beste keuze. Als het belangrijker is om realtime met de printer mee te lopen, bieden YOLOv5 of YOLOv8 een betere balans tussen snelheid en nauwkeurigheid, terwijl YOLOv11 geschikt is in situaties waar het vermijden van valse alarmen cruciaal is. De studie toont ook aan waar huidige systemen tekortschieten, vooral bij kleine vuildeeltjes en vage strepen. Door te wijzen op specifieke afwegingen en lacunes helpt het werk bij het ontwerpen van slimmere, camera-gebaseerde waakhonden die afval kunnen verminderen en de betrouwbaarheid van houtgebaseerd 3D-printen kunnen verbeteren.
Bronvermelding: Wang, X., Yan, C., Li, X. et al. Comparative evaluation of YOLO and RT-DETR models for real-time defect detection in wood-based 3D printing. Sci Rep 16, 14672 (2026). https://doi.org/10.1038/s41598-026-41855-y
Trefwoorden: hout 3D-printen, defectdetectie, YOLO-modellen, RT-DETR, additieve productie