Clear Sky Science · ja
適応型ファジィPID制御器を用いた車輪型移動ロボットの自律航法における軌跡追従性能の向上
より賢いロボットの操縦者
ロボットが倉庫や農場、さらには災害現場へと進出するにつれ、床が滑りやすい場合やモーターに不具合が生じた場合でも、計画された経路を滑らかかつ安全にたどる能力が求められます。本稿は、車輪式ロボットのふらつきやドリフトを抑え、混雑し予測不能な環境でもより確実に航行できるようにする新たな手法を検討します。
軌道を維持するのが難しい理由
倉庫の台車や測量ロボットなど多くの無人地上走行体は、効率が高く速度も出せ、比較的構造が単純であるため車輪で移動します。しかし、ロボットを設計どおり正確に計画経路上に維持するのは意外と難しい問題です。実際の床は埃っぽかったり凹凸があったりし、車輪は滑り、センサはノイズを含み、ロボットの実際の物理特性は理想的な数式モデルと異なることが多いからです。固定調整の標準的なPID制御のような従来手法は、設計時の仮定が満たされる場合にのみ良好に働き、ロボットに大きな負荷がかかったり外乱が加わったりすると精度を失ったり不安定になったりします。
二層の制御ブレイン
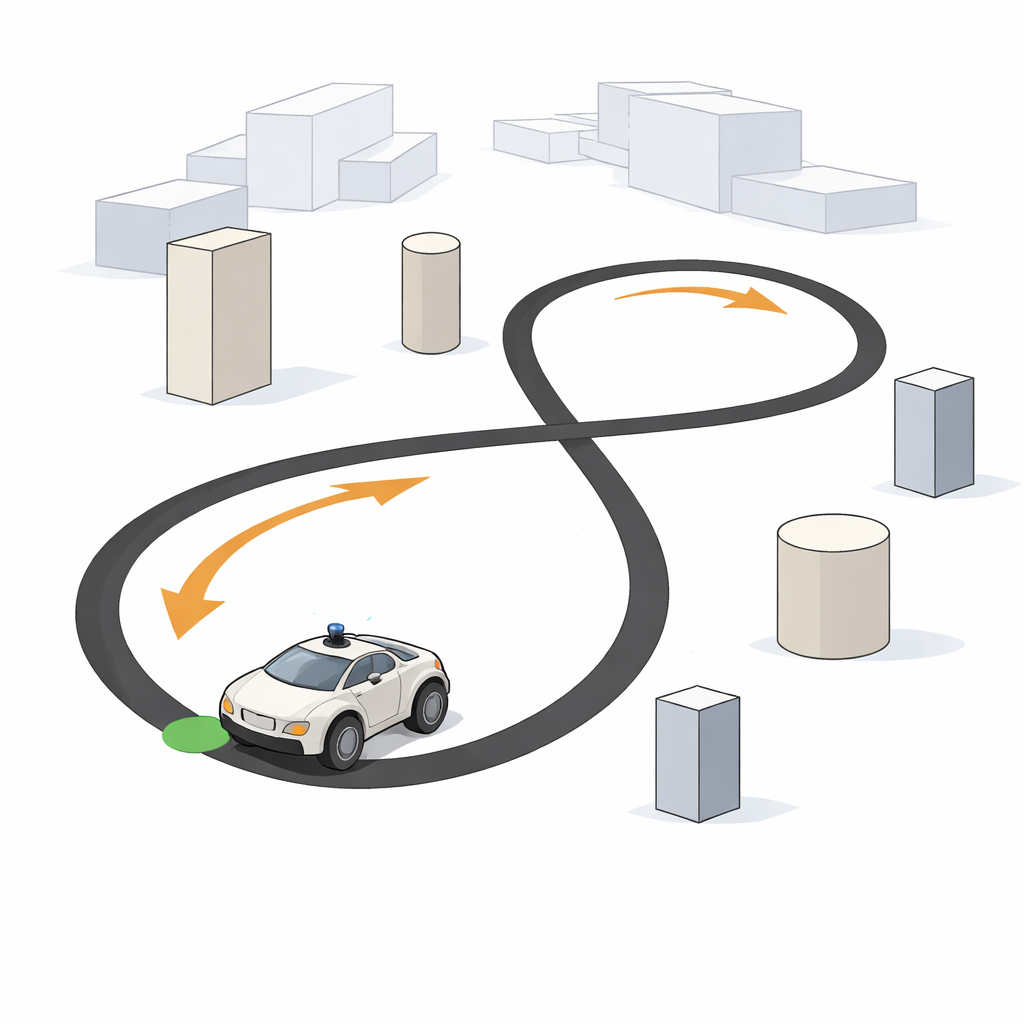
これらの限界を克服するため、著者らは左右に駆動輪を持つ代表的な車輪型ロボット向けに二層構造の“ブレイン”を設計しました。上位層は平面上のロボット位置のみを見て、計画経路(例えば滑らかな8の字曲線)に従うために前進速度と回転速度をどのようにするかを計算します。下位層はその速度を実際にモータで出力させる役割を担います。ここで本稿は適応型ファジィPID制御器を導入します。これは標準的なPID制御器で、3つの主要な利得(ゲイン)がロボットの挙動が望ましいものからどれだけずれているかを監視するファジィ論理システムによって連続的に調整されるものです。
走行中に学習させる
ファジィ論理は、誤差が小さい場合と大きい場合、あるいは誤差が増加している場合と減少している場合で異なる反応をさせるといった単純な「もし〜ならば」ルールを、すべての外乱を正確に数学的にモデル化することなく適用できる利点を提供します。本設計では、追従誤差の大きさとその変化速度という2つの入力信号が小型のファジィシステムに与えられ、PIDゲインの更新値が出力されます。結果として、ロボットが加速・減速したり滑りやノイズに遭遇したりする際に、制御器は実時間で応答を硬くしたり緩めたりできます。数学的な安定性解析により、これらの連続的な調整やモデル化されていない影響が存在しても、追従誤差は常に小さな保証された領域へ収束し、そこに留まることが示されています。
過酷な試験にかける
研究者らは次に、この制御器をよく知られた移動ロボットプラットフォームのモデルを用いた多数のシミュレーションで試験しました。まず外乱がない理想条件下で、適応型ファジィPID制御器は従来のPIDや他の高度な動的制御器よりも既に8の字軌道をより正確に追従し、速度プロファイルが滑らかで平均誤差が小さいことを示しました。次に、ロボットの実際の物理パラメータと制御器が想定する値の不一致を意図的に導入し、まず20%の誤差から始めて最終的には100%の完全な不一致まで拡大しました。同時に、ランダムノイズやでこぼこ地面やぎくしゃくしたアクチュエータを模した周期的な力も加えました。

極端な環境でも生き残る結果
これらのますます厳しいシナリオ全体を通じて、適応型ファジィPID制御器は8の字軌道をきわめて良好に追従し続けたのに対し、従来のPIDは特に曲線が急な部分で振動したり遅れたり逸脱したりし始めました。二乗平均平方根(RMS)追従誤差などの主要な誤差指標は、モデルのすべてのパラメータが誤っておりノイズが吹き荒れる状況でも、新手法によって概ね半分以下に削減されることが一貫して観察されました。運動は滑らかで安定しており、この制御器が単に精度が高いだけでなく、リアルタイム運用に耐える堅牢性と実用性を備えていることを示しています。
日常のロボットにとっての意義
専門外の方への要点は、本研究が車輪式ロボットに対してより寛容で自己調整する「オートパイロット」を提供するということです。ロボットや環境を完全に把握することに依存する代わりに、制御器はロボットの現在位置と目標位置の継続的な差から学び、条件が変化するにつれて穏やかに再調整します。これにより、倉庫や工場、危険な現場における移動ロボットは、車輪が滑ったり荷重が変化したりモーターが劣化したりしても、計画ルートをより安全かつ正確にたどれるようになり、信頼できる日常的な自律機械の実現に近づきます。
引用: El Zoghby, H.M., Sharaf, S.M., Bendary, A.F. et al. Enhanced trajectory tracking for autonomous navigation of wheeled mobile robots using an adaptive fuzzy PID controller. Sci Rep 16, 12736 (2026). https://doi.org/10.1038/s41598-026-45772-y
キーワード: 自律移動ロボット, 軌跡追従, ファジィPID制御, ロボット航法, 外乱抑制