Clear Sky Science · ja
装着型オプトミオグラフィーが継続的な神経補綴制御を可能にする
筋肉信号を滑らかな制御へと変える
マウスやジョイスティック、あるいは指さえ使わずに、手首のごくわずかな動きだけでコンピュータのカーソルやビデオゲームを操作できると想像してください。手を失った人や微細運動が苦手な人にとって、指差しやクリック、ゲーム操作といった日常的な能力を取り戻す手段になり得ます。本研究は、筋電ケーブルの代わりに光で筋肉を「読む」新しいタイプのリストバンドを提示し、コンピュータや義手デバイスのより安定で快適、正確な制御への扉を開きます。
なぜ現在の筋肉制御デバイスは不十分なのか
現在の筋ベースのコントローラは主に表面筋電図(sEMG)に依存しており、皮膚上の電極で筋収縮時の微弱な電気信号を検出します。これらのシステムはロボット義手やハンズフリーのコンピュータ操作を可能にしてきましたが、深刻な欠点も伴います。信号は弱く、電気ノイズやセンサーの動きで容易に汚染されます。隣接する筋肉が干渉し、深部筋は読み取りにくい。多くの切断者にとって、これらのシステムは労力がかかり、信頼性に欠け、疲れやすいため、先進的な義肢を使うことを断念してしまう要因となっています。
配線の代わりに光で筋肉を読む
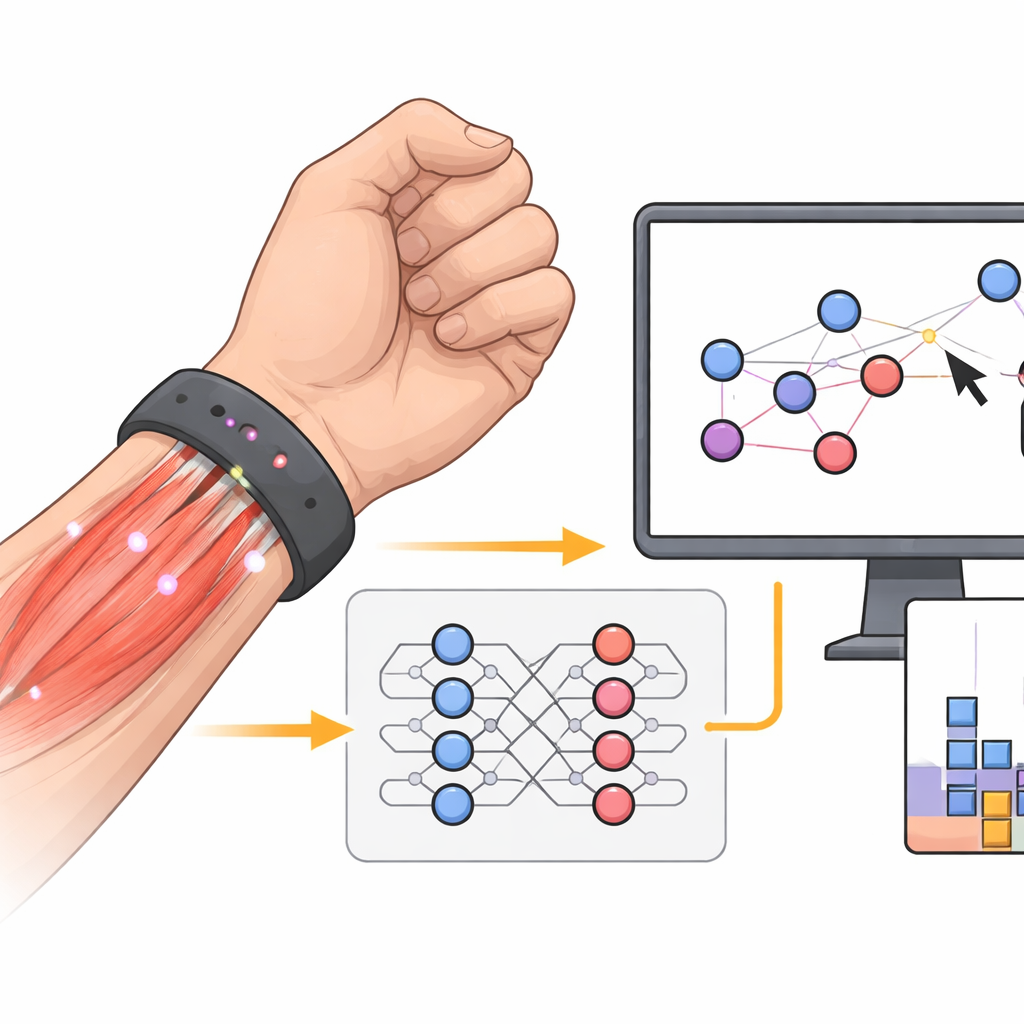
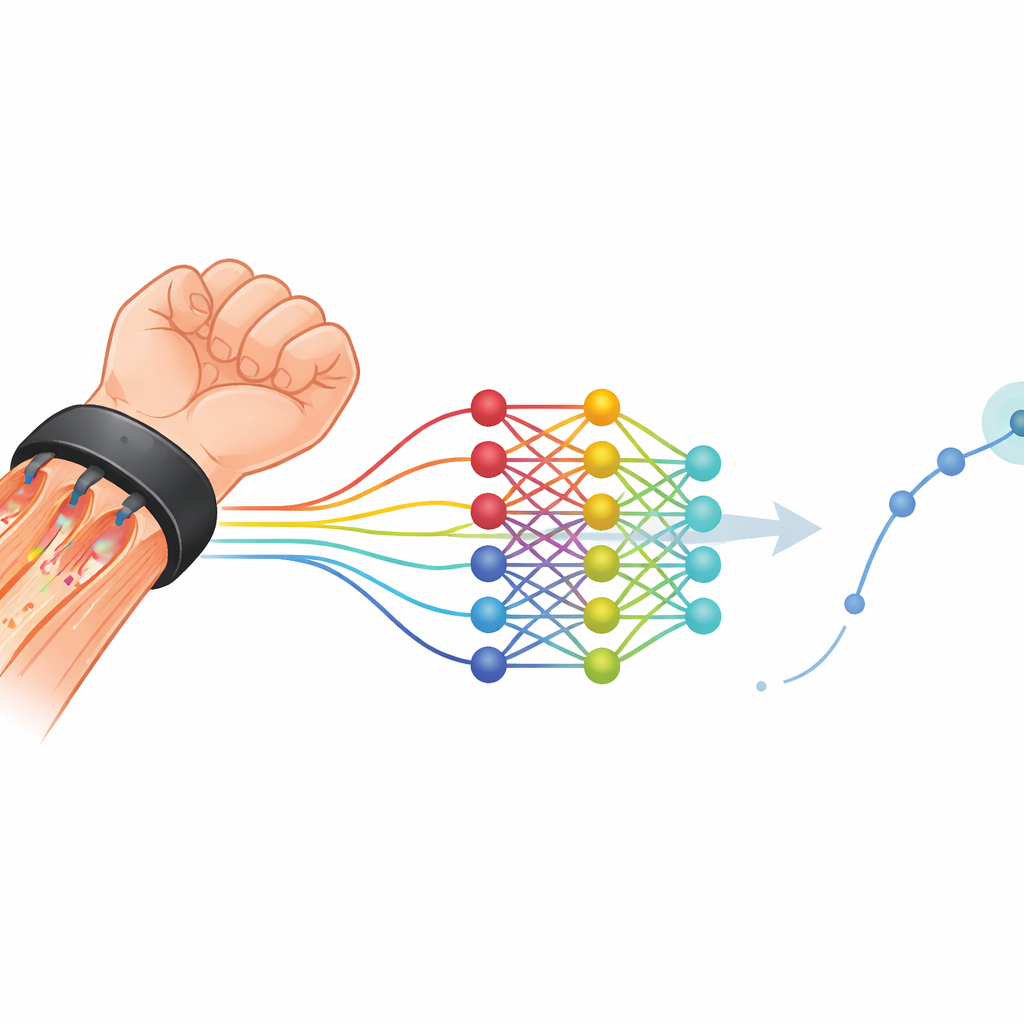
研究者らはオプトミオグラフィーという代替法を検討しました。これは近赤外光を用いて、収縮時の血液量や組織特性の変化に伴う筋肉の変化を追跡する手法です。柔軟なリストバンドには無害な光を前腕に照射する発光ダイオードと、皮膚下から散乱して戻ってくる光を検出する小さなセンサが組み込まれています。生体組織はこの波長帯で比較的透過性があるため、信号は従来の電極ベースの計測よりもノイズに強く、電気的干渉の影響を受けにくい傾向があります。チームのリストバンドは手首周りで50チャネルのデータを記録し、リアルタイムでコンピュータに送信します。
リストバンドにマウスのように振る舞わせる学習
生の光学信号を制御に変換するために、著者らは小型のニューラルネットワーク—本質的には小さく効率的なパターン認識プログラム—を訓練しました。参加者はリストバンドを装着して「センターアウト」課題を行いました:画面の中央に点が現れ、時計の文字盤のように配置された12の位置のいずれかに跳びます。それぞれの方向に対して、参加者は一貫した手首または手のジェスチャーを使い、中立姿勢用とクリックを模したこぶしの握りこぶしの2つの追加ジェスチャーを用いました。ネットワークはリストバンドの各スナップショットを、移動方向を示す2つの値と「クリック」の可能性を反映する3つ目の値に変換することを学習しました。重要なのは、各新しいサンプルごとに出力を生成するため、段階的で途切れた動きではなく、連続的で滑らかなカーソル動作が可能になる点です。
指差し、クリック、さらにはテトリスも習得
運動障害のない8人の若年成人と、両手の全ての指を失った1人がこのシステムを試しました。短いキャリブレーションと数分のトレーニングの後、彼らはジェスチャーを使って画面中央からランダムに配置されたターゲットへカーソルを移動し、握りこぶしのクリックでターゲットを「捕らえる」ことができました。複数セッションを通じて、参加者の多くはカーソルが理想的な直線経路にどれだけ近づいたか、ターゲット到達の迅速さ、ゴール付近での余分な動きの量といった指標で改善しました。パフォーマンス向上はセッションの前半で最も顕著で、後半に低下することもあり、疲労やリストバンドのズレが原因と考えられます。別のテストでは、健常者1名と切断者が同じ操作でテトリスをプレイし、手首と手の動きだけで落下するブロックを回転・配置することに成功しました。
この新手法の比較評価
チームは自らの結果を標準的な性能モデルや電極ベースの過去の研究と比較しました。課題の難度と運動時間の関係を示すよく知られた枠組みであるフィッツの法則を用いて、多くの参加者—切断者を含む—が電気的筋センサで見られるレベルと類似した性能を達成したことを示しました。ポイント作業の効率(スループット)や経路効率(移動の直線性)は、連続制御というより要求の高い条件やクリックジェスチャーの追加にもかかわらず、確立された技術に近づきました。研究者らは、今後光学測定と電気測定を組み合わせることで、さらに精度とロバスト性が向上すると主張しています。
日常生活にとっての意味
一般的な見地から言えば、この光学ベースのリストバンドは、自然な手首・前腕の動きを流暢でリアルタイムなコンピュータカーソルや簡単なゲームの制御に変換でき、手を失った人でも利用可能であるということです。研究は被験者数が少なく、切断者は1名にとどまりますが、オプトミオグラフィーが電気的アプローチに匹敵する継続的で直感的な制御を提供し、いくつかの弱点を回避できることを示しています。快適性、センサ配置、長期安定性に関するさらなる改良が進めば、この種のシステムはより応答性の高い義手やリハビリ用ツール、医療機器というより日常のアクセサリのように感じられる装着型コントローラを実現する可能性があります。
引用: Khalikov, R., Soghoyan, G., Sintsov, M. et al. Wearable optomyography enables continuous neuroprosthetic control. Sci Rep 16, 9604 (2026). https://doi.org/10.1038/s41598-025-32646-y
キーワード: 装着型神経補綴, 筋肉-コンピュータ・インターフェース, 光学的筋肉センシング, ジェスチャーに基づく制御, 補綴リハビリテーション